基于局部加权拟合算法的无人机遥感影像多尺度检测技术
2021-03-04邱晓磊
邱晓磊
(河南省地球物理空间信息研究院,郑州 450000)
0 引言
目前无人机遥感技术广泛地应用于各个领域,无人机遥感的工作原理是通过对拍摄的环境影像进行多尺度处理检测分析,研究出环境的特征,然后下达飞行命令,维持无人机的正常飞行[1-2]。遥感图像采集过程十分容易受到外界因素的干扰,这些干扰会在图像中形成噪声污染,降低无人机遥感影像的分辨率。
传统的无人机遥感影像多尺度检测技术对于遥感拍摄的影像分析不准确,影响无人机安全飞行命令的准确度,造成一定的安全隐患。对回归预测模型而言,预测模型的精度主要取决于特征选取,属性选择不恰当,往往导致预测结果大不相同。局部加权拟合算法较好地解决了局部加权线性回归预测的问题,它的预测性能不太依赖选择特征,而且可以很好地避免过拟合的风险。
为了促进无人机遥感影像多尺度检测技术的发展,本文以局部加权拟合算法为核心研究新型的无人机遥感影像多尺度检测,分别分析无人机遥感影像数据的预处理和影像特征提取方法。研究无人机的遥感影像多尺度检测技术,提高无人机的飞行安全性。
1 无人机遥感影像多尺度处理分析
1.1 无人机遥感影像预处理
无人机遥感影像多尺度检测技术在对周围环境进行数据采集时,会将区域内的所有信息进行拍摄,其中会存在无效的影像,提高影像多尺度检测的复杂度,因此本文通过对采集到的无人机遥感影像多尺度数据进行预处理操作,为影像的特征提取提供研究基础[3]。
本文设计的无人机遥感影像多尺度数据预处理操作的主要流程是对采集到的影像数据完成有效数据的拼接处理,将无效的影像数据信息进行剔除。无人机行驶在弯线和曲线航线时,是数据采集混乱的关键区域,会出现无人机遥感影像重拍和漏拍的情况,导致无人机遥感技术对于覆盖区域的图像影像精度低,设备为了提高影像精度采用多次扫描的形式,又造成了大量数据冗余,所以预处理通过最小二乘法方法将冗余的影像数据删除,进行有效的数据拼接。最小二乘法在筛选的时候多次循环计算,计算结果具有可靠性和真实性[4-5]。最小二乘法筛选如图1所示。

图1 最小二乘法筛选
最小二乘法在对无人机遥感影像数据预处理时,当航线弯度达到3%时,就将普通的拍摄过滤方式关闭,开启新式的影像拍摄要求,具体要求为设置无人机航拍摄区域的重复率为90%,其周围区域重复率设置为60%。此处设置的目的是通过重复率的设置将无人机航线的经纬度偏差时间缩短为1 s,降低无人机遥感影像出现漏拍的情况,改善外界环境对影像数据的影响程度,在一定程度上弥补航线弯曲的数据可视化。无人机遥感影像预处理将拍摄到的有效数据按照“抽稀”规则完成数据的拼接,构成一个全新的遥感影像数据[6-7]。“抽稀”处理后的遥感影像可以有效地减小拼接误差、改善影像拼接视觉效果,同时在一定程度上提高了影像处理的精度,为无人机遥感影像特征提取提供数据基础。抽稀前后数据处理结果如图2所示。

图2 抽稀前后数据处理结果
1.2 无人机遥感影像特征提取
遥感影像的特征点是进行无人机遥感影像多尺度检测技术的关键点,为了将遥感影像的各个特征点的实际意义发挥最大,本文采用高斯金字塔定理辅助无人机遥感影像的特征提取[8-9]。高斯金字塔的特征提取过程是首先将预处理的影像数据按照金字塔形状进行降采样构建,最终得到n阶的影像序列,然后遍历以上操作,构建不同尺度下的高斯金字塔序列,最后通过序列对比,提取影像特征。得到的序列对比如图3所示。
图3 序列对比图
高斯金字塔中原始图像位于底层,其余上层图像大小为相邻下层图像大小的1/4,则高斯金字塔的构建公式如下所示:
G!=DOWN(Gi-1*G(x,y,z))
(1)
其中:Gi-1表示降采样;x表示高斯核函数;y表示高斯模糊核的尺度空间因子,此值越大则该尺度下图像越平滑。
在构建不同尺度的高斯金字塔时,为了提高高斯金字塔的稳定性和不变性,需要对无人机遥感影像进行差分尺度空间划分,划分借助以下公式完成:
(2)
差分尺度划分可以降低遥感影像局部数据的极值点,降低影像多尺度特征值的偏差度。在高斯金字塔差分尺度空间中,它的作用是提取有效图像区域的极值点,通过极值点来判断特征点,极值点的选择有一个基本的选择原则,最重要的是极值点必须与遥感图像的上下尺度邻域点相关联[10-11]。根据高斯金字塔和差分尺度划分完成遥感影像的特征提取,提取计算公式如下所示:
D(x,y,z)=(G(x,y,kz)-G(x,y,z)*I(G(x,y))
(3)
2 基于局部加权拟合算法的无人机遥感影像多尺度检测
2.1 局部加权拟合算法
局部加权拟合算法是一种线性加权回归算法,其工作原理是通过测量无人机遥感影像各个特征点之间的距离,将此距离作为多尺度分析的加权系数,平衡检测区域其他关键点的加权性,计算出特征点中权重最低的点,完成影像的多尺度检测。拟合的三种状态如图4所示。
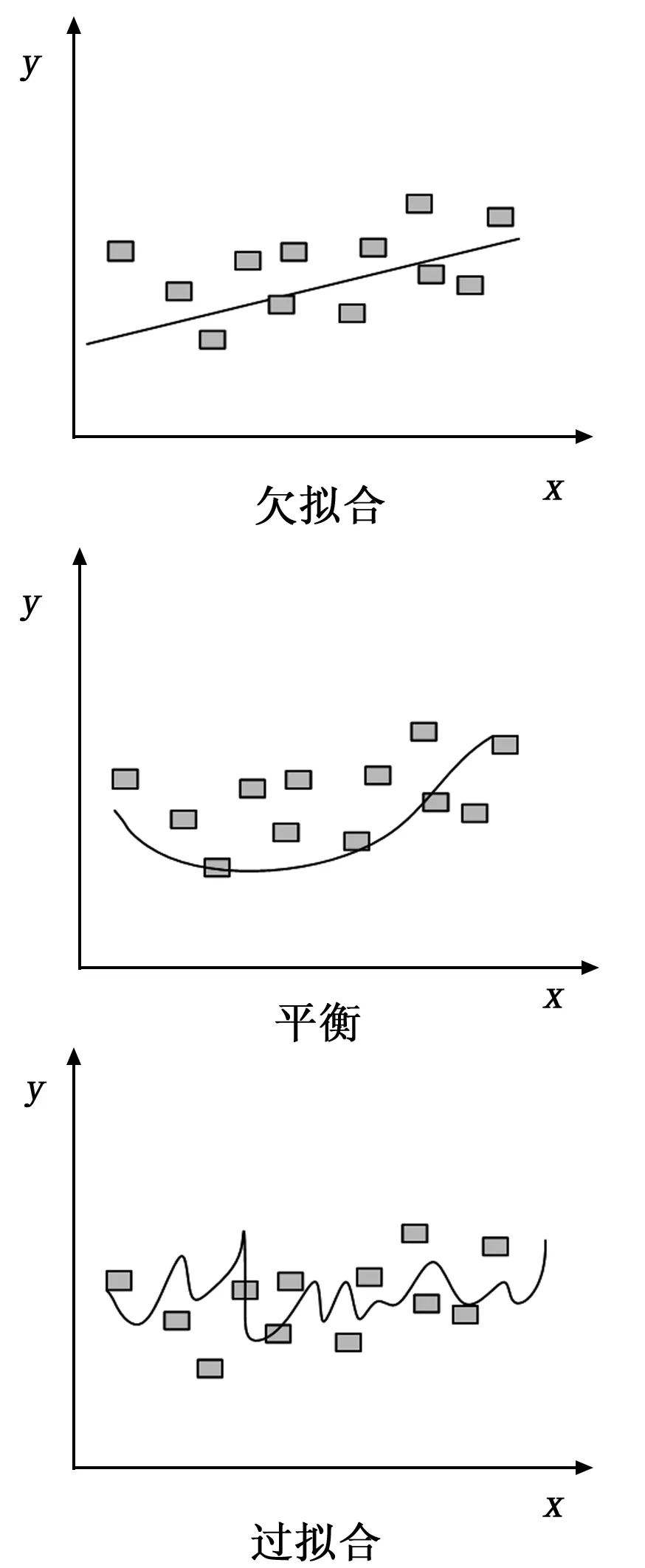
图4 拟合状态
具体无人机遥感影像各个特征点距离的计算公式如下所示:
(4)
其中:特征点的权重公式如下所示:
(5)

因为在对无人遥感影像特征值进行权重的同时,由于其他普通点的干扰和区域内目标的影响,结果会出现线性偏差,为了避免无人遥感影像多尺度检测技术结果的偏差,本文对以上公式进行偏差分权处理,分权公式如下所示:
(6)
其中:Axi和bi是通过最小二乘法计算出来的,因为局部加权拟合算法对聚集程度较高的特征点加权拟合过程容易出现遗漏,导致加权拟合的数据结果比正常的数据小,因此需要在影响密集特征点区域进行二次权重,采用两次权重的平均值,保证结果的准确性
局部加权拟合算法在对无人机遥感影像进行小格区域划分时,默认被划分的小格都是相等大小的,但是影像的各个关键特征点之间的距离是不固定的,因此就出现了距离函数中心越近的特征点距离越大,因此本文引入log函数,log函数如公式(7)所示:
(7)
其中:x代表曲线中点,x0代表曲线的最大值;k代表曲线的陡度。
当某一特征点的函数权重的计算结果趋近于1,并且不变时,代表不存在距离偏差。因此基于上述的权衡与分析,整合出最终的无人机遥感影像多尺度加权计算的计算公式如下所示:
(8)
2.2 无人机摇杆影像多尺度检测
根据以上无人机遥感影像数据预处理和特征提取以及分析局部加权拟合算法,本文总结出基于局部加权拟合算法的无人机遥感影像多尺度检测方法,具体分为构建有效影像数据集、构建影像网络模型、合并并完成影像数据的检测三部分[12-13]。
基于局部加权拟合算法的无人机遥感影像多尺度检测技术工作流程如图5所示。
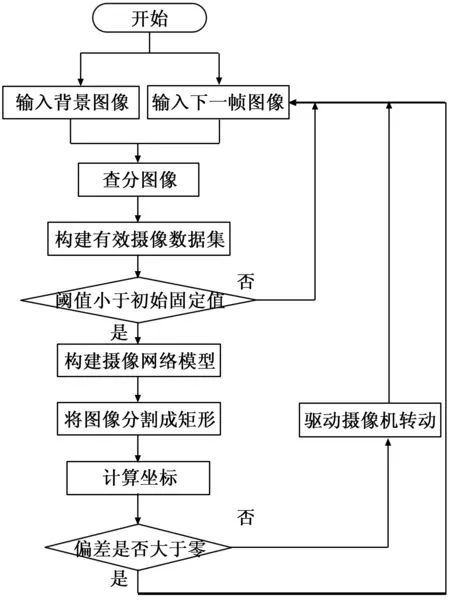
根据图5可知,构建有效的影像数据集,首先根据高斯核函数对无人机摇杆影像区域的整体获取,并且划分出需要完成的检测目标区域,为了确保影像数据的完整性,区域获取时会设计边缘预留区域。有效区域划分后,依据小波图像变换方法对影像进行目标变换和影像多尺度格式的转换,转换的同时根据整体原则立即分割相同格式的影像特征。无人机遥感影像的分割操作为特征点的提取奠定基础,最终将各个提取的特征点和原始影像进行对照,作为网络模型的构建数据[14-15]。
构建网络模型主要包括对无人机遥感影像多尺度数据的分割网络模型和测试网络模型两种,为了得到最醒目的影像模型,本文设定网络模型的大小为300×400,将拍摄的无人机遥感影像都按照此格式进行放大或者缩小处理。在此网络模型的基础上,增加若干个卷积层,方便影像检测过程检测目标的分类和权重,卷积层的大小主要为 40×40、20×20、10×10、5×5。将影像多尺度的权重设置为0.000 5,忽略检测过程中的动量和不可预测天气的干扰。测试网络模型的工作是对影像特征目标进行测试,查看特征是否达到认定要求,提供数据的可用性。
最后一步是完成无人机遥感影像多尺度检结果检测,基于局部加权拟合算法,对各个网络模型中的特征点进行检测认证,根据不同的特征点确定出影像内事物的准确状态和外观参数,完成影像多尺度检测操作。
3 实验研究
为了检测本文提出的基于局部加权拟合算法的无人机遥感影像多尺度检测技术的有效性,与传统基于改进SPHP算法的无人机遥感影像多尺度检测技术、基于改进SURF算法的无人机遥感影像多尺度检测技术进行实验对比。
采集的8张遥感图像如图6所示。
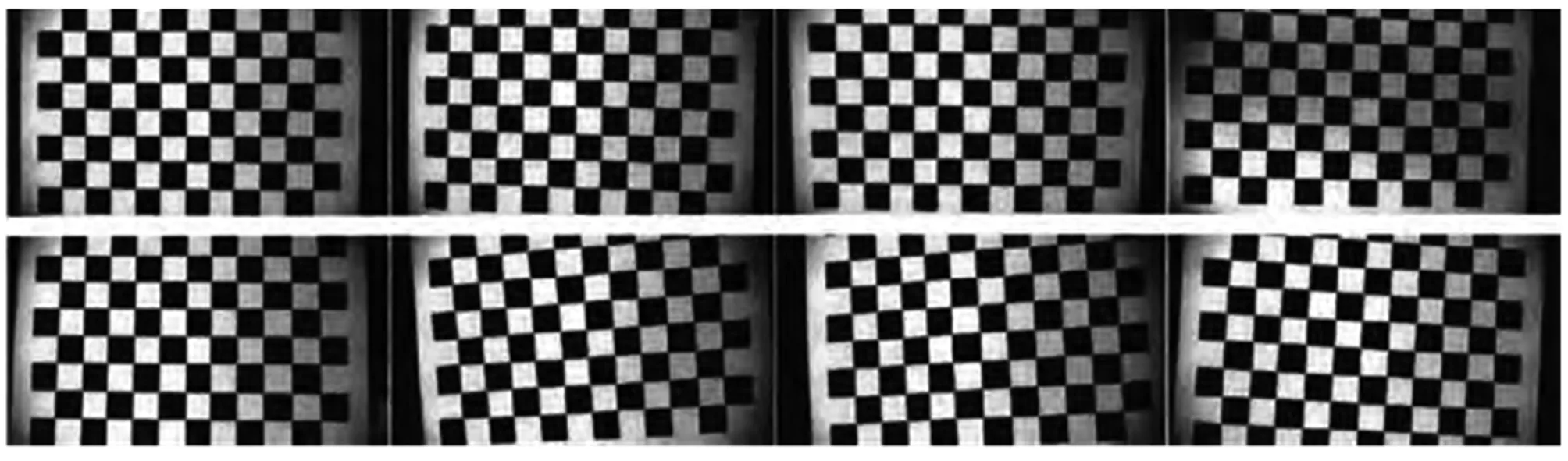
图6 采集标定的多光谱图像
在确定多光谱图像后,拟合二维高斯曲面,使用遗传算法分析高斯曲面模型中的各项参数,通过优化处理,得到种群数目。为更好地进行实验,本文从主观评价和客观评价两方面对数据进行比较。
主观评价结果如图7所示。

图7 主观评价结果
根据主观评价结果可知,在图7(a)、(c)的左框中,检测的原始图像渐晕现象十分明显,中间的亮度高于四周。无人机在飞行过程中所处的环境光照十分稳定,而且采集的对象十分单一,所以图像中的亮度差异更加明显。对比不同算法下的检测结果可以知道,传统的基于改进SPHP算法的无人机遥感影像多尺度检测技术与基于改进SURF算法的无人机遥感影像多尺度检测技术在物体边缘信息和明暗区域变化方面的处理能力较差,得到的图像亮度变化规律与实际状况吻合度较低,而本文提出的基于局部加权拟合算法的无人机遥感影像多尺度检测技术具有更强的处理能力,得到的全局亮度分量图像不会受到物体边缘信息的影响,其中明暗突变区域亮度相差较低,与实际的渐晕图像亮度变化规律更加符合。
选用典型图像进行对比,得到的不同技术的灰度值如图8所示。

图8 灰度值实验结果
对比图8的灰度值实验结果,可以发现,传统基于改进SPHP算法的无人机遥感影像多尺度检测技术虽然能够改进渐晕现象,但是还是十分明显。相比之下,传统的基于改进SURF算法的无人机遥感影像多尺度检测技术与本文提出的基于局部加权拟合算法的无人机遥感影像多尺度检测技术对渐晕现象的处理能力更好,得到的整体灰度水平基本一致。由于传统图像在明亮区域存在泛灰现象,所以检测技术需要对亮度差异进行调整,本文提出的基于局部加权拟合算法的无人机遥感影像多尺度检测技术具有保留不同物体亮度差异的能力,而传统技术得到的图片亮度边缘过高。
从X方向和Y方向两个不同的方向评价灰度值,采集所有的像素点,对200张不同的遥感图像进行矫正,不同技术下得到的灰度值分布状况如图9所示。

图9 灰度值分布情况实验结果
由于平均图像之间的个性差异能够消除,所以通过分析整体灰度值的矫正效果就能确定不同技术的检测效果。根据上图可知,原始图像的中间区域亮度过高,而两端区域的亮度又过低。针对这一问题,三种技术都能够进行改善,本文提出的局部加权拟合算法改善效果最好。本文提出的算法在X方向和Y方向的改善存在过渡区域,所以视觉效果更好,而传统的技术均出现了亮度偏高的问题,检测到的图像存在光晕,不适合于实际应用。
4 结束语
本文的局部加权拟合算法精确地区分无人机遥感影像检测的目标区域和其他区域,简化了检测的流程。本文首先分析如何处理无人机遥感影像获取的数据,对数据进行预处理以及特征分析,最后确定准确的无人机遥感影像多尺度检测目标,然后了解局部加权拟合算法的核心和计算原理,最后完成基于局部加权拟合算法的无人机遥感影像多尺度检测方法的研究,达到本文研究的目的。
