多频线谱激励下的混合自适应微振动主动控制∗
2021-03-03方昱斌朱晓锦高志远张合生苗中华
方昱斌, 朱晓锦, 高志远, 张合生, 苗中华
(上海大学机电工程与自动化学院 上海,200072)
引 言
近年来,随着科技发展和设备制造精度的要求越来越高,结构振动控制问题引起广泛关注[1-2]。振动主动控制(active vibration control,简称AVC)比被动隔振具有更多优势,日益受到重视[3-4]。在振动主动控制领域,FxLMS 算法因其简单易用、自适应能力强,成为常用的自适应结构振动主动控制算法之一[5-6]。通常,引起振动的扰动源往往是几个甚至多个窄带频谱干扰源的叠加,存在多频线谱激励下的振动控制问题。FxLMS 算法对于多频线谱扰动下的振动控制效果并没有其在单一频谱振动控制中好。为了提升抑振效果,一般采用增加滤波器阶数的方法[7],但这样会增加运算量,不利于系统的实时性。特别是在窄带扰动频谱间隔较小的多输入多输出(multiple input multiple output,简称MIMO)振动主动控制系统中,控制器的计算量会呈几何倍数增长[8],对于系统硬件有较大压力。可以采用基于频域的自适应滤波方法,但该算法实现较为复杂[9]。
针对多频窄带抑制问题,在噪声主动控制领域Ziegler 提出了并联自适应滤波结构控制算法[10],通过并联多个独立自适应滤波器将多频窄带抑制问题分解成为多个单频窄带抑制问题[11-13]。随后,并联结构自适应算法被引入到结构振动主动控制中。文献[14-16]将传感器采集到的参考信号通过多个窄带滤波器滤波之后,得到多个单频窄带参考信号。
在并联自适应滤波结构控制算法中,如果参考信号与扰动的频谱完全一致,则可以取得较为满意的抑振效果。如果两者之间的频谱有偏差或者不匹配,控制效果会大幅下降甚至失效,即频率失配[10]。在实际生产过程中,窄带扰动的频谱可能会随着时间发生漂移[17-18],也可能会有宽频的测量噪声混在参考信号中,这些都会影响并联结构算法的控制效果。针对并联自适应滤波控制算法的频率失配问题,学者们进行了相关研究。Liu 等[10]应用自适应正交振荡器来确保扩散特征值最小,提升了算法的收敛速度。Xiao 等[11]引入自适应调频的方法,通过自适应调节信号发生器生成的参考信号频率追踪扰动频率,以提升整体算法的自适应性和鲁棒性。Jeon 等[19]基于最小方差准则,设计了一个参考信号频率估计子系统,提升了算法的收敛速度。Kukde等[20]将人工神经网络方法引入到参考信号频率估计子系统。上述对于并联自适应滤波控制算法的频率失配问题的改进方法都是基于参考信号的自适应频率估计,但引入的自适应过程大幅增加了算法整体的计算量,且上述算法都是基于前馈控制结构的。实际上,反馈自适应控制对于宽频扰动的抑制有自身结构的优势[21]。在实际振动控制系统中,前馈滤波中的参考信号的取得并不容易,且获取过程中存在不确定因素[22],而误差信号中蕴含着比参考信号更准确、丰富的信息且容易测得。
笔者首先以传统并联结构FxLMS 算法为基础,针对其在抑制扰动信号频谱偏移及宽频谱噪声所引起振动时的限制和不足,提出一种混合自适应振动主动控制算法,通过增加反馈通道来提升算法的抑振性能;其次,考虑到参数自适应算法在振动控制中的鲁棒性,采用后验误差代替现有的先验误差来更新迭代滤波器权值,以提升算法的鲁棒性能[23];然后,给出了混合自适应振动主动控制算法的稳定性和收敛性分析,在Adams 软件中建立微振动主动隔振平台虚拟机,通过与Simulink 软件联合仿真,对比验证混合自适应振动主动控制算法在结构微振动控制中的有效性;最后,建立结构微振动主动控制实验系统,在多种扰动情况下针对单输入单输出(single input single output,简称SISO)微振动主动控制进行了实验研究。实验结果表明,混合自适应振动主动控制算法能够有效抑制多个窄带频谱扰动所引起的结构微振动,相对于并联结构FxLMS算法具有更好的抑振效果和鲁棒性。
1 多频线谱激励下振动主动控制算法
1.1 并联结构FxLMS 算法
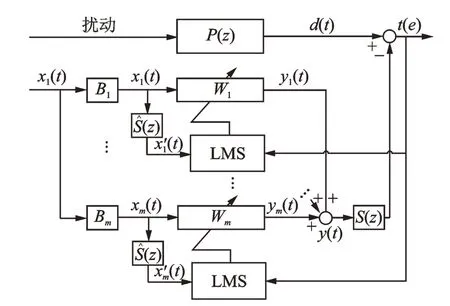
图1 并联结构FxLMS 算法振动主动控制系统框图Fig.1 The structure of parallel-form FxLMS algorithm in AVC application
图1 为并联结构FxLMS 算法振动主动控制系统框图。假设扰动源包含有M个窄带频谱成分,中心频率为fm,m=1,2,…,M。图1中的P(z) 和S(z)分别为振动主动控制系统的主振通道和次级通道,表示为

次级通道S(z)包含了从控制器输出到误差信号采集的所有通路,包括D/A、功率放大器、微振动结构中的作动通路、误差传感器、信号调理器及A/D 环节。Ŝ(z)为次级通道S(z)的数学估计。控制系统中共有M个独立的并联子控制器,其控制输出之和为并联结构FxLMS 算法的总输出,即

参考信号x(n)通过多个带通滤波器Bm,m=1,2,…,M滤波之后,被分解为不同频带上的单频参考信号xm(t),同时,自适应滤波器Wm的迭代更新为

其中:μm为第m个前馈通道的滤波器更新步长。
第m个前馈通道上的滤波参考信号x'm(t)为

1.2 混合自适应振动控制算法
并联结构FxLMS 算法属于前馈自适应振动控制的范畴,由于其在处理扰动频率失配及宽频谱噪声时的限制,故笔者提出一种混合自适应振动主动控制方法,提升原有算法的抑振性能。传统的Fx-LMS 算法采用先验误差更新权值,即权值系数W(n+1)是依据误差信号e(n)计算得到。此时,FxLMS 算法的步长选择需要保证在一定的收敛条件内。如果采用后验误差去更新,即权值系数W(n+1)是依据后验误差信号ep(n)计算得到,算法步长的收敛条件可以放松,对于混合自适应算法的参数鲁棒性和收敛速度有大幅度提升[23]。考虑到后验误差LMS 算法在鲁棒性方面的优越性,将原有算法中的参数自适应方法改为后验误差LMS 算法,放宽了算法中步长因子的取值范围,提升算法的参数鲁棒性[23]。
图2 为混合自适应振动主动控制方法的系统框图。假设扰动信号中包含M个窄带频谱成分,中心频率为fm,m=1,2,…,M。与并联结构FxLMS 算法一样,控制系统中共有M个前馈并联通道,设有M个独立的并联自适应滤波器。另外,增设一条反馈通道以提升算法鲁棒性能。在前馈通道中,通过带通滤波器Bm的设置,参考信号x(t)被拆分成与扰动信号频谱相同的多个窄带信号xm(t)

图2 混合自适应振动主动控制方法的系统框图Fig.2 The structure of hybrid-adaptive algorithm in AVC application

并联自适应滤波器Wm通过后验LMS 算法调节收敛并输出该并联通道的控制信号ym(t)

在反馈通道中,参考信号xf(t)通过次级通道的估计与误差信号计算得到

反馈自适应滤波器Wf通过后验LMS 算法调节收敛并输出该通道的控制信号yf(t)

y(t)为控制器的控制输出响应,由前馈通道的输出响应ym(t)及反馈通道的输出响应yf(t)得到

该混合自适应振动主动控制算法如式(11)~(16)所示

其中:后验误差epm(t)和epf(t)通过式(17)和(18)求得。

2 稳定性及收敛性分析
2.1 在确定环境下的稳定性分析
混合自适应振动主动控制算法中的自适应滤波器为有限脉冲响应(finite impulse response,简称FIR)形式,可将其表示为无限脉冲响应(infinite impulse response,简称IIR)形式

混合自适应算法的第m个前馈通道的自适应过程可以表示为式(20)~(22)所示

反馈通道中的自适应过程可表示为式(23)~(25)所示

在忽略传感器的测量噪声对系统造成影响的确定环境下,引入预滤波器第m个前馈通道后验误差可表示为



根据文献[24]可知,笔者混合自适应控制算法的稳定条件为式(30)和(31)是正实传递函数。
2.2 在随机环境中的收敛性分析
对于测量噪声不能被忽略的随机环境,使用ω(t+1)表示测量噪声。前馈通道和反馈通道的后验误差分别为

假设

收敛域DCm和DCf为

如果Hm(z−1)和Hf(z−1)是严格正实的,则


可见,在随机环境下的混合自适应算法收敛条件为Hm(z−1)和Hf(z−1),为严格正实传递函数。与确定环境下类似,一个较好的次级通道辨识结果可以放松整个混合自适应控制系统的收敛条件。如果次级通道的辨识结果足够好,即使在有较高测量噪声的环境中,提出的混合自适应控制算法也是收敛的。
3 收敛性仿真及分析
结合Adams 软件强大的动力学分析功能和Simulink 图形化编程及在控制方法仿真中的优势,笔者通过联合仿真技术研究了混合自适应控制方法在结构微振动控制中的收敛性能。如图3 所示,Adams 和Simulink 联合仿真系统主要包括2 部分:Adams 软件中建立的微振动主动控制实验平台动力学虚拟机和Simulink 软件中设计的混合自适应振动控制器。通过Adams 软件导出相应的接口量与Simulink 互联,即可完成结构微振动主动控制联合仿真系统的建立。
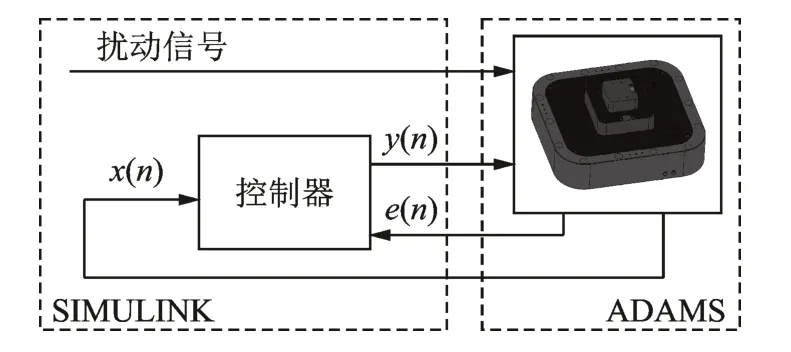
图3 Adams 和Simulink 联合仿真系统Fig.3 Co-simulation structure of Adams and Simulink
为了实现结构微振动主动控制仿真,如图4 所示,设计了微振动主动控制平台虚拟机,主要包括基座、起振平台、抑振平台和载物台。基座用于承载和固定整个微振动主动控制平台;起振平台用于模拟外部扰动所引起的微振动;抑振平台通过控制算法输出作动来抑制微振动。控制目标是抑制载物台的微振动。通过压电堆与柔性铰链的装配连接,起振平台和抑振平台可以实现在相互垂直的x,y,z3 个方向上的微振动。Adams 软件中采集载物台上表面中心点的位移变化作为算法的误差信号,采集起振平台上的任一点位移振动作为算法的参考信号。通过生成的被控模块输出接口到Simulink 中的控制器,经过控制器运算,将控制信号输出到抑振平台的压电堆作动器。
在联合仿真中,针对4 个目标干扰源频谱,对比验证前馈并联结构FxLMS 算法及混合自适应控制算法在不同带通滤波器数量下的振动抑制效果。添加10 Hz 的正弦叠加作为干扰信号,再添加3 个高阶谐波成分,分别为20,25 和30 Hz。20 Hz 正弦信号的幅值取10 Hz 正弦信号幅值的30%,25 Hz 和30 Hz 正弦信号的幅值取20 Hz 正弦的30%。所有自适应滤波器的阶数设为相同,自适应滤波器系数初始值都设为0。仿真分析过程中将FxLMS 算法、并联结构FxLMS 算法以及混合自适应算法的抑振效果进行对比。对于并联结构FxLMS 算法与混合自适应算法,对比其在不同前馈自适应滤波器个数的振动控制效果,用M表示前馈自适应滤波器的个数。M=1 表示仅设置10 Hz 的参考信号带通滤波器,M=2 表示同时设置10 Hz 和20 Hz 的参考信号带通滤波器,以此类推。取振动幅值衰减90%所需的控制时间作为评价算法收敛速度的指标。将仿真时间最后5 s 时的抑振效果作为稳态评价指标。抑振效率的计算式为
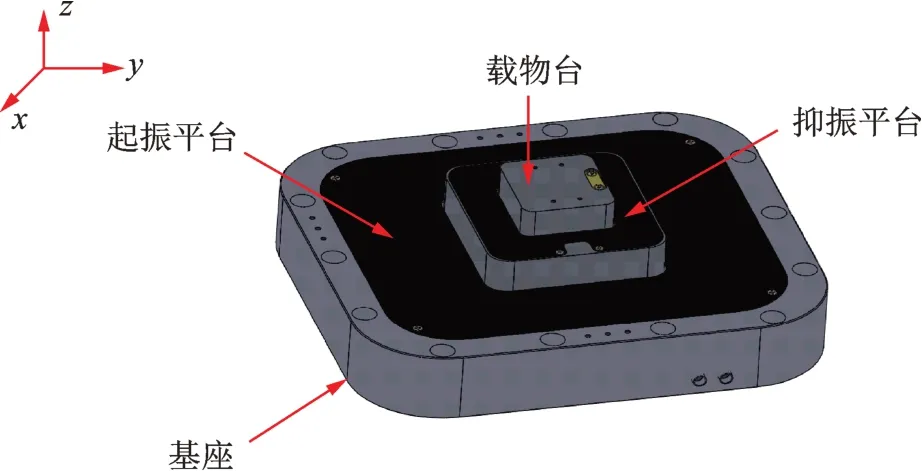
图4 微振动主动控制平台虚拟机Fig.4 Virtual machine of the micro vibration active control platform

其中:d(i)为振动主动控制前的残差;e(i)为振动主动控制后的残差;SA的单位为dB。
SA为负值,意味着振动得到抑制,反之则为振动增强;SA越小,说明抑振效果越好。FxLMS 算法、并联结构FxLMS 算法以及混合自适应算法在不同带通滤波器个数下的振动抑制仿真结果如表1所示。
表1 中,在收敛速度方面,混合自适应算法具有明显优势,而FxLMS 算法对于多频扰动的抑制速度并不是很出色,需要43.98 s 才能达到振幅衰减90%的水平。并联结构的FxLMS 算法随着其并联通道中自适应滤波器的个数增多,算法收敛速度增快。当其并联自适应滤波器个数与扰动信号频谱数相同时(M=4),需要11.39 s 达到收敛水平。当其自适应滤波器个数有3 个时,则需要26.18 s 达到收敛水平。当滤波器个数仅有1 个和2 个的情况下,算法始终不能够抑制掉带通滤波器频谱以外的扰动所引起的振动。

表1 振动抑制仿真结果Tab.1 Simulation results of vibration suppression
从各算法的抑振效率看,传统FxLMS 算法对于多个窄带频谱扰动引起的振动抑制效率为−45.96 dB。并联结构FxLMS 算法只有在并联通道个数与窄带扰动的频谱个数相同时(M=4),抑振效率优于FxLMS 算法,达到−76.61 dB。当自适应滤波器个数少于窄带扰动频谱个数时,相比于FxLMS 算法,其抑振效率并不令人满意。笔者所提出的混合自适应算法在仿真中的抑振效率随着前馈自适应滤波器的个数增加,抑振效率逐渐提升。由于反馈通道控制器的存在,当前馈自适应滤波器个数等于1 时(M=1),抑振效率达到−79.99 dB,优于并联FxLMS 算法在自适应滤波器个数与窄带扰动频谱数相同(M=4)时的效果。对于M=2,M=3 和M=4 的情况下,抑振效率的提升并不是很明显,但也均达到−82 dB。
4 实验分析与验证
4.1 实验平台搭建
为了进一步对比验证结构振动主动控制算法的抑振效果,笔者设计制作了一种三自由度微振动主动隔振结构如图5 所示,主要包括基座、起振模块、抑振模块和载物台。该结构以压电堆为作动器,通过多个压电堆及柔性铰链的组合连接,完成在两两垂直的x,y,z3 个方向的微振动环境模拟及微振动主动控制。基座主要用来承载和固定整个隔振结构;起振模块用于模拟外扰引起的结构微振动响应;抑振模块可以通过主动振动控制抑制起振模块所引起的微振动。抑振模块与载物台固定连接,载物台的振动响应通过电容位移传感器测量得到。
在此基础上,基于高性能计算机、D/A 和A/D板卡、信号调理器和功率放大器等相关测控仪器,以及Matlab/Simulink 软件开发环境,构建了三自由度微振动主动隔振实验系统结构图,如图6 所示。

图5 三自由度微振动主动隔振结构Fig.5 Picture of the 3 DOF active micro-vibration control unit

图6 三自由度微振动主动隔振实验系统结构图Fig.6 Block diagram of the 3 DOF active micro-vibration control system
基于Matlab/Simulink 工具箱,两台高性能计算机通过交叉网线连接,构建了xPC 实时测控系统,一台作为目标机,另一台作为宿主机。将2 张NI-6289 数据采集板卡插入目标机的PCI 插槽,作为本实验系统的A/D 输入和D/A 输出板卡。实验前,在宿主机上编写Simulink 控制程序,并生成C 代码下载到目标机中。实验过程中,目标机作为独立的实时控制器,首先输出0~10 V 的扰动信号给功率放大器(E00.D6,XMT©),放大至0~150 V,驱动起振模块模拟外扰产生微振动响应。位移传感器(E509.C1,XMT©)采集载物台的振动信号,经过信号调理器(E09.C1,XMT©)调理之后成为0~10V 的电压信号,进入目标机进行实时处理。通过目标机中控制器的控制算法运算,输出0~10 V 的控制信号,经过功率放大器放大之后驱动抑振模块作动,对载物台的微振动进行抑制。三自由度的微振动主动隔振实验系统实物图如图7 所示。在本微振动主动控制实验中,主要考虑双频扰动下的单输入单输出的微振动控制。由于实际环境中的外扰比较复杂,所以在SISO 微振动主动控制中分别选取几种典型的复杂扰动信号作为微振动扰动激励源,验证所提出的混合自适应振动主动控制算法在不同扰动环境下的抑振性能。

图7 三自由度的微振动主动隔振实验系统实物图Fig.7 Experimental setup of the 3 DOF active micro-vibration control system
4.2 双频微振动主动抑制实验
在双频微振动主动控制实验中,针对实际环境中扰动信号的复杂性,选取双频激励、频率突变、幅值突变和噪声添加4 种典型扰动激励进行实验验证,对比并联结构FxLMS 控制算法和混合自适应控制算法的抑振效果。
4.2.1 双频激励
采用频率分别为10 Hz 和25 Hz 的2 个正弦信号的叠加作为振动激励信号。2 个带通滤波器的中心频率与扰动信号的频谱一致,为10 Hz 和25 Hz。前馈并联FxLMS 算法与混合自适应算法中的自适应滤波器采用相同阶数FIR 形式滤波器,初始值为0。双频正弦外扰激励下微振动主动控制时域效果和实验结果如图8,9 所示。实验过程中,并联Fx-LMS 算法在实验时间55 s 前能够快速抑制振动幅值,抑振效率最高达到−87 dB;但是随后稳态性能有所反弹,直至控制时间100 s 时,其抑振效率为−66 dB。相比之下,混合自适应算法的稳态抑振效率达−86 dB。另外,在并联FxLMS 算法控制下,系统的稳态位置较原来中心位置偏移了1 μm 左右。这是由于前馈通道参考信号传感器引起的,混合自适应控制算法由于反馈通道的存在,稳态位置仍在中心位置,获得更好的控制效果。
4.2.2 频率突变
实验开始时,采用10 Hz 和25 Hz 的2 个正弦信号叠加作为振动激励信号,施加控制信号直到振动衰减稳定。在实验时间80 s 时,扰动激励信号的频率突变为11 Hz 和26 Hz。频率突变外扰激励下微振动主动控制时域效果和实验结果如图10,11 所示。实验时间前80 s,控制效果与双频激励下一致。在80 s 时扰动信号的频率突然发生变化,并联Fx-LMS 算法瞬间失效,无法有效抑制结构振动。混合自适应算法在扰动信号频率突变的情况下抑振效率升至−21 dB,随后仍能够抑制振动,逐渐收敛至−46 dB。从图10 中可以看出,并联FxLMS 算法在扰动频率突变后抑振失效,而混合自适应算法仍然具有较好的抑振效果。

图8 双频正弦外扰激励下微振动主动控制时域效果Fig.8 Control effects under double-frequency excitation in time domain

图9 双频正弦外扰激励下微振动主动控制实验结果Fig.9 Control effects under double-frequency excitation

图10 频率突变外扰激励下微振动主动控制时域效果Fig.10 Control effects under mutation-frequency excitation in time domain
4.2.3 幅值突变
实验开始时采用10 Hz 和25 Hz 的2 个正弦信号叠加作为振动激励信号,施加控制信号直到振动衰减稳定。在实验时间为80 s 时,扰动信号的幅值突变为原有正弦信号幅值的125%,幅值突变外扰激励下微振动主动控制时域效果和实验结果如图12,13 所示。并联FxLMS 算法与混合自适应控制算法在扰动信号的幅值发生突变后,抑振效率发生抖动,随后都能快速收敛至原有抑振水平。混合自适应算法在扰动幅值时所引起的振动幅值仍然较并联FxLMS 算法有优势。

图11 频率突变外扰激励下微振动主动控制实验结果Fig.11 Control effects under mutation-frequency excitation

图12 幅值突变外扰激励下微振动主动控制时域效果Fig.12 Control effects under mutation-magnitude excitation in time domain

图13 幅值突变外扰激励下微振动主动控制实验结果Fig.13 Control effects under mutation-magnitude excitation
4.2.4 噪声添加
为了对比上述振动主动控制算法对于宽频噪声扰动的鲁棒性,将宽频白噪声叠加在双频扰动信号中,对比各主动振动控制算法的抑振效果。在实验时间为80 s 时,叠加宽频白噪声至双频正弦扰动激励信号。添加噪声外扰激励下微振动主动控制时域效果和实验结果如图14,15 所示。突然叠加白噪声干扰后,并联FxLMS 算法与混合自适应控制算法的抑振效率都有影响,但是混合自适应控制算法仍能收敛至−52 dB 的抑振水平,明显优于并联Fx-LMS 算法的−38 dB。

图14 添加噪声外扰激励下微振动主动控制时域效果Fig.14 Control effects under double frequency with wideband noise excitation in time domain

图15 添加噪声外扰激励下微振动主动控制实验结果Fig.15 Control effects under double frequency with wideband noise excitation
通过上述4 种典型扰动激励下的微振动主动控制实验,对比了并联FxLMS 算法与混合自适应控制算法的抑振效果,可以发现。
1)在双频窄带扰动下,如果并联FxLMS 算法的参考信号带通滤波器的中心频率与扰动信号频谱一致,可获得较快地抑振速度和较好的抑振效果。混合自适应算法在双频激励下也能取得较好的抑振效率。即使在振动控制过程中,窄带扰动信号的振动幅值发生突变,并联FxLMS 算法和混合自适应振动控制算法仍然具有较好的适应性,能够迅速收敛。
2)如果双频窄带扰动信号的频率发生漂移或者突变导致扰动信号频率失配,则会影响并联Fx-LMS 算法的抑振效果,甚至可能导致控制器失效发散。混合自适应控制算法因为反馈通道的存在能够克服并联FxLMS 算法的不足,在扰动信号频谱突变或者漂移的情况下,仍然能够抑制扰动信号所引起的振动幅值,保持较好的稳态收敛水平。
3)扰动信号中叠加有宽频白噪声,会影响并联FxLMS 算法和混合自适应振动控制算法的控制效果,但是混合自适应振动主动控制算法相较于并联FxLMS 算法具有较好的鲁棒性能,仍能取得较好稳态性能。
5 结束语
以多频线谱扰动源的结构微振动主动抑制为目标,在并联FxLMS 振动主动控制算法的基础上,提出一种混合自适应振动主动控制算法。基于联合仿真及振动控制实验,对比分析了相关振动控制算法的抑振效果。结果表明,笔者提出的混合自适应振动主动控制算法相较于并联FxLMS 算法具有更好的抑振表现,特别是针对扰动频率失配及宽频噪声的情况,算法鲁棒性得到加强。