压电柔性机械臂系统辨识与振动主动控制∗
2021-03-03康建云苏史博
康建云, 毕 果, 苏史博
(厦门大学航空航天学院 厦门,361005)
引 言
由于具有效率高、能耗低、载荷比大以及构建设计紧凑等优点,以空间站吊装用机械臂、大型柔性天线、空间太阳能帆板为代表的柔性构件在在航空航天领域得到了广泛应用[1]。但是,柔性结构体由于其固有的低刚度和低阻尼特性,在操作过程中受到不规律的外扰动力很容易产生幅度较大且不易衰减的弹性振动,影响了操作过程中的定位精度和操作效率,无法满足实际操作需要。随着智能柔性臂的发展,响应速度、定位精度以及重载等关键问题日益突出,因此必须对柔性机械臂进行必要的振动控制。
压电类材料作为一种能够将电能与机械能互相转换的材料,具有结构紧凑、响应时间快和能量转换效率高等特性,为柔性结构的振动主动控制提供了新的思路。学者们对基于压电柔性机械臂的振动主动控制进行了广泛研究[2-3]。Pereira 等[4]使用积分谐振控制方法对柔性机械臂进行振动抑制,在控制器中加入2 个嵌套反馈回路,实现了精确的终点定位和有效的振动抑制。Etxebarria 等[5]将最优控制和滑膜控制用于机器人柔性臂的鲁棒控制方案,实现了闭环跟踪性能。Resta 等[6]针对多关节柔性机械臂在大位移运动过程中的非线性振动问题,采用独立模态控制法进行振动控制实验,结果表明,在不影响机械臂运动和材料强度的情况下,振动控制使系统的阻尼比增加了15%。Zeng 等[7]基于变结构模型参考自适应控制理论,设计了一种利用输出反馈控制轨道柔性航天器的新型控制器,数值仿真结果表明,该控制器对于未知参数、干扰和未建模动态的非线性系统具有良好的瞬态特性和鲁棒性。Rew等[8]提出了一种对频率变化的结构进行多模态振动控制的自适应正位置反馈算法,以压电智能柔性臂为实验对象进行算法验证,取得了良好的效果。娄军强等[9]从系统模型辨识的角度出发,针对压电柔性臂的建模问题,采用ARMAX 作为参数模型进行系统辨识,使用线性二次型调节器(linear quadratic regular,简称LQR)优化算法对压电柔性机械臂进行了振动控制。张顺琦等[10]通过有限元法建立了压电悬臂梁动力学模型,设计了模糊逻辑控制器对悬臂梁进行振动主动控制,通过加入LQR 算法和比例积分微分(proportional integral differential,简称PID)算法进行对比,验证了模糊控制的有效性。朱晓锦等[11]将滤波U-最小均方算法用于压电柔性结构的振动主动控制,并实验验证了该算法的可行性和有效性。邱志成等[12]针对压电柔性臂的振动问题,采用正位置反馈(positive position feedback,简称PPF)和比例微分(proportional differential,简称PD)控制算法进行振动控制实验,控制效果较为明显。
笔者针对压电柔性机械臂的弹性振动问题,首先,通过实验辨识的方法建立了系统的动力学模型;其次,基于控制理论和优化算法,引入线性二次型最优控制,并将最优控制与遗传算法结合,针对加权矩阵难以解析的关键问题,将遗传算法应用于控制器的设计中,实施了加权矩阵的优化设计;最后,搭建了以工控机为核心的压电智能柔性结构振动主动控制系统的硬件实验平台,编写了基于LabVIEW 的系统软件测控程序,并开展了对压电柔性臂持续激励和自由衰减下的振动控制实验研究。
1 系统描述
本研究涉及的压电柔性臂系统结构图如图1 所示,测控系统实物图如图2 所示。本实验用到的传感器为压电纤维复合材料(型号为MFC-0714);电荷放大器型号为YE5835;数据采集卡型号为NIUSB-6002;压电驱动电源型号为芯明天-E01。

图1 压电柔性臂系统结构图Fig.1 Block diagram of the flexible manipulator system
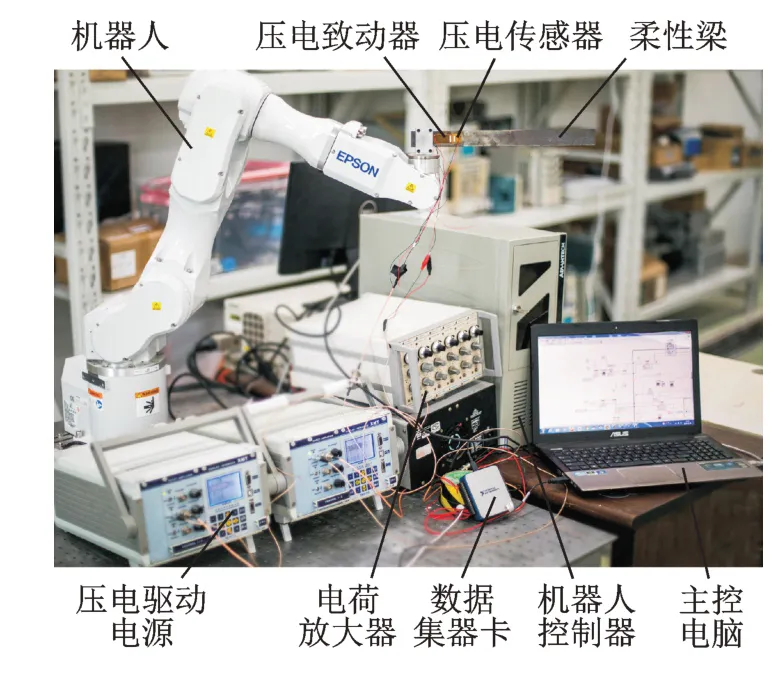
图2 压电柔性臂测控系统实物图Fig.2 Experimental setup of the flexible manipulator system
2 系统辨识建模
2.1 理论模型
柔性臂和压电致动器的基本参数如表1 所示。选用欧拉-伯努利悬臂梁作为受控结构,其传递函数的表达式为

其中:ki为开环传递函数的增益;ξi为i阶阻尼比;ωi为i阶振动角频率。

表1 柔性臂和压电致动器的基本参数Tab.1 System properties of beam and PZT actuator
由于不能得到柔性梁系统的所有阶模态,且悬臂梁振动在前几阶振动模态中占主导作用,所以引入模态截断技术,只保留前几阶模态。通过重新构造系统的零点分布[13],得到系统模型为

其中:ai,bi为第i阶模态的零点。
2.2 实验辨识
选用正弦扫频信号作为输入信号,可以较为充分地激发压电柔性臂的各阶模态,以防止某一低阶模态被遗漏。扫频信号的频率范围为0~5 Hz,幅值为±5 V,系统在扫频激励下的应变输出电压信号如图3 所示。

图3 扫频激励下的输出电压信号Fig.3 Sweep excitation output signal
借助Matlab 系统辨识工具箱,使用零极点重新分布的系统模型,对输入输出实验数据进行辨识[14],辨识模型的实验结果比较如图4 所示。

图4 辨识模型的实验结果比较Fig.4 Comparison of experimental results of identification model
辨识得到的系统传递函数为

为了定量对比辨识结果和实际输出的匹配程度,引入模型吻合度指标

其中:yi(t)为第i个采样时刻的实际输出为辨识模型在第i个采样时刻的理论输出;吻合度指标J越接近1,表示辨识模型和实际模型的匹配度越高。
由于实验辨识得到的系统传递函数输出结果与实际结构响应的匹配度为95.22%,故可以用该模型进行后续控制算法的设计。
在发展上,核心素养具有终生发展性,也具有阶段性。核心素养在个体不同人生阶段中的着重点有所不同,不同教育阶段对某些核心素养的培养也存在不同的敏感性,即一些核心素养在特定的教育阶段可能更容易取得良好的培养效果。初中生物的课堂教学应该在学生初中毕业之时留给学生怎样的学科素养?教师要以培养学生的学科核心素养为终极目标,让学生在体验中逐渐积累知识,培养意识,发展能力。
3 控制算法设计
为了便于反馈控制器的设计,将系统模型转换为状态空间表达式[15],从能观的角度构造系统状态方程

其中:A,B和C分别为系统的状态矩阵、控制矩阵和输出矩阵;系统输入u(k)为施加在压电致动器上的控制电压;系统输出y(k)为压电传感器的检测电压。
假设状态反馈控制器为

其中:K为状态反馈增益矩阵,使得闭环系统能够满足期望的性能。
将式(6)代入系统状态方程,得到

对于式(5)的开环系统,开环传递函数的极点为系统矩阵A的特征值。当变成式(7)的闭环形式,状态矩阵变成了(A−BK),因此通过配置反馈矩阵K可以使闭环系统的极点达到期望的状态。
3.1 线性二次最优控制LQR
为了便于最优极点的选择和状态反馈矩阵的计算,引入LQR 来设计最优控制器。对于完全能控且能观的系统,定义其二次性能泛函为

最优控制的目的是寻找最优输入u(k),使得系统线性二次型性能泛函达到最小。
为了便于计算,取

其中:P满足Riccati 方程

3.2 加权系数矩阵Q 和R 的选取
从线性二次型最优控制的控制原理可以发现,控制器的控制效果是否优良,关键在于设置合适的加权矩阵。如何确定矩阵参数目前还没有特定的数值解决方案,只能根据经验法或试凑法获得具体矩阵中的数值。遗传算法可以在指定的阈值内进行智能搜索并不断优化,将其在线性二次型调节器设计中使用,实现对加权矩阵的优化设计,以便于缩短控制器的设计时间和增强控制器的控制性能。遗传算法优化设计LQR 控制器示意图如图5 所示。
从线性二次型性能指标可以看出,系统的振动能量越小,表明柔性臂的控制效果越好;控制能量越小,则表明输出的控制量越小。因此,优化的目标函数可以表示为
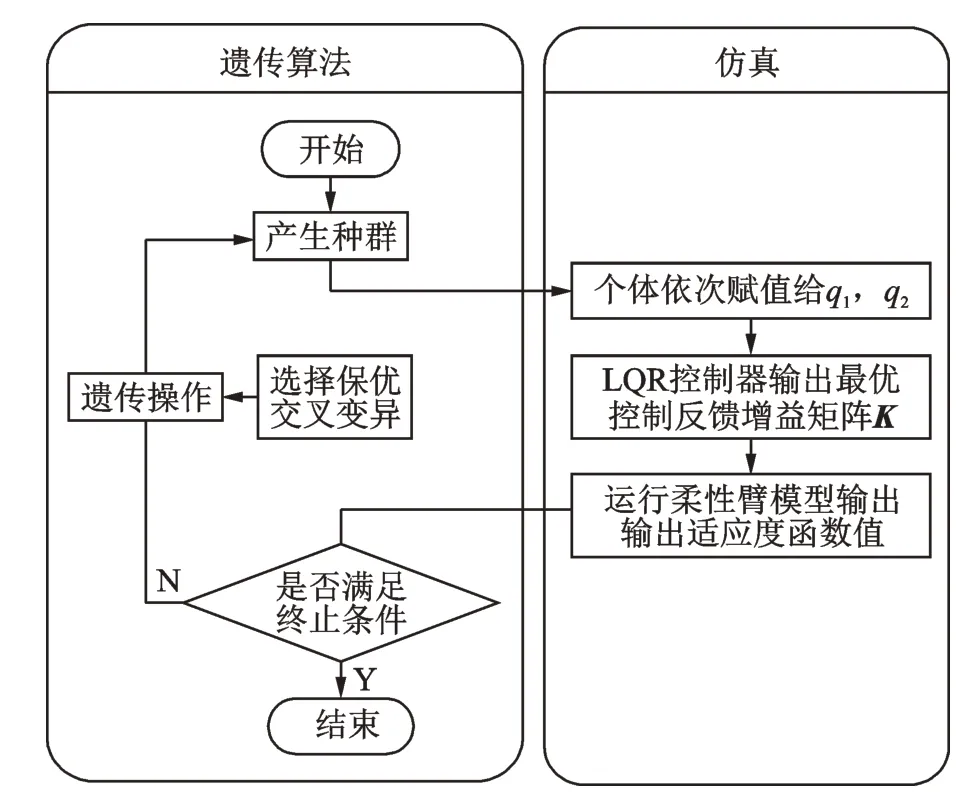
图5 遗传算法优化设计LQR 控制器示意图Fig.5 Optimum design of LQR controller by genetic algorithms

对于加权矩阵Q,R,设定其值为其中:Q为对角阵,取值大小反应了不同的控制效果;q1=0.78;q2=0.004;R为单位 对角阵。
3.3 加权系数优化结果
遗传算法寻优过程中参数设置如表2 所示。

表2 遗传算法参数设置Fig.2 Parameter setting of genetic algorithms
图6 为平均适应度的遗传进化过程,显示了基于遗传算法的LQR 参数的最优值搜索过程。可以看出,当进化代数进行到第50 代以后,种群个体之间的平均距离明显变小,进化结果收敛到了最优值。对最优的染色体串进行解码,可得到最佳的Q,R矩阵,进而得到最优控制的增益反馈矩阵K。
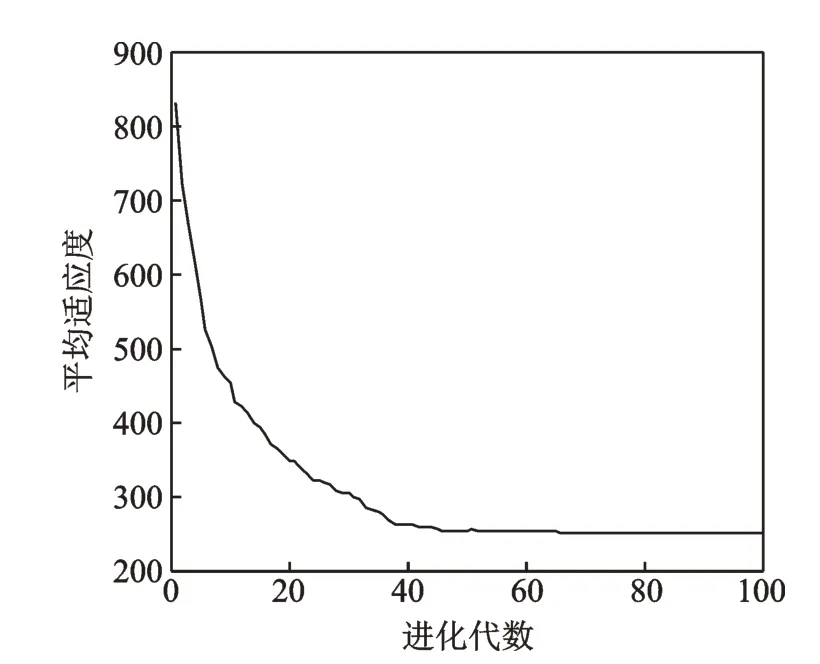
图6 平均适应度的遗传进化过程Fig.6 Evolution process of the mean fitness
4 实验验证
为了验证优化参数后LQR 控制器具有良好的性能,针对压电柔性臂的振动主动控制设计了模糊逻辑控制器。其基本工作原理是:将测量得到的状态输入量通过模糊化的方式转化成可以用语言描述的模糊量,通过制定模糊规则,模糊推理转化成为模糊输出值,再通过清晰化接口将模糊输出值转化为能够用来进行实际控制的精确值。
图7 为控制前后应变输出电压信号,给出了在10 s 停止施加激励后,利用所设计的控制器对柔性臂振动进行抑制响应实验曲线。可以看出:分别施加线性二次型最优控制和模糊控制6 s 后,柔性臂的振动幅度分别下降到±0.05 V 和±0.1 V;而如果不施加控制,在6 s 的时候柔性臂的振动为±1.3 V。
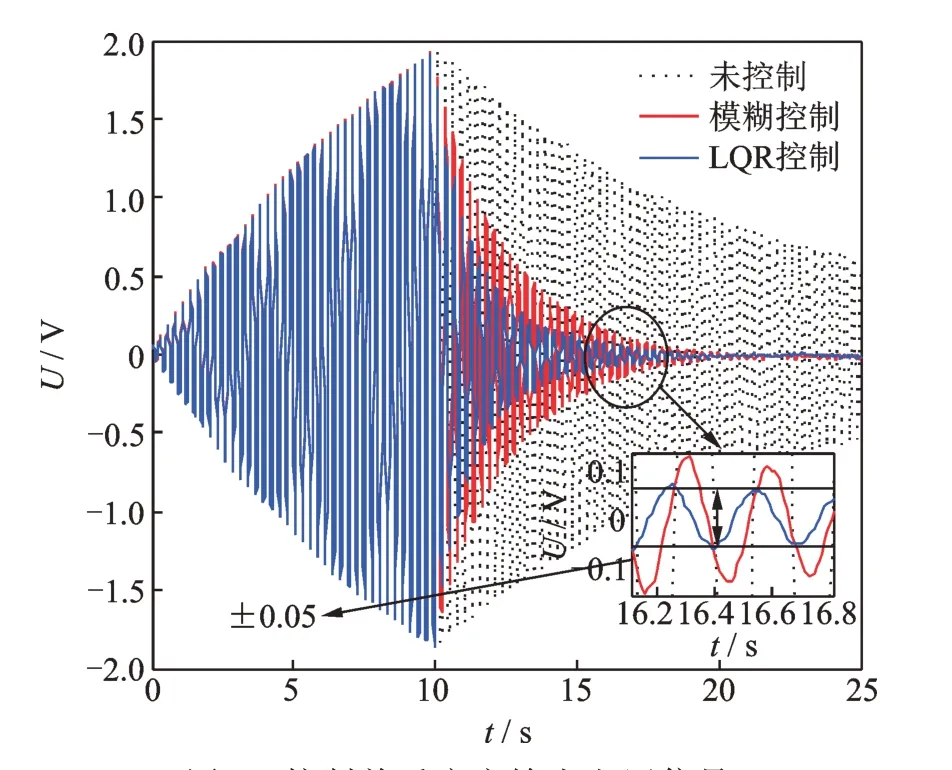
图7 控制前后应变输出电压信号Fig.7 Experimental result of sensor output with control
图8 为控制前后对应输出的频域曲线。可以看出,施加线性二次型最优控制和模糊控制后,在一阶振动频率处柔性臂的振动得到了很好抑制,大大降低了柔性臂振动的衰减时间,且线性二次型最优控制相较于模糊控制具有较好的控制效果。
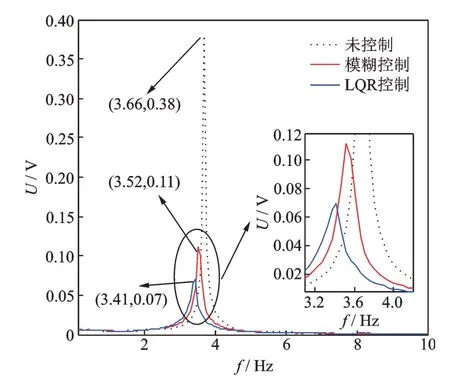
图8 控制前后对应输出的频域曲线Fig.8 Experimental result of sensor output with control in frequency domain
柔性臂在受持续正弦激励的作用下,利用所设计的控制器对柔性臂的振动进行抑制响应实验。图9 为控制前后应变输出电压信号曲线。
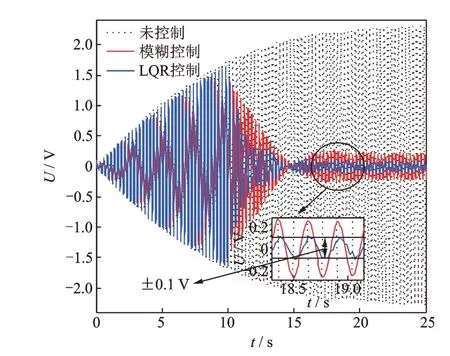
图9 控制前后应变输出电压信号Fig.9 Experimental result of sensor output with control
由时域曲线可知,柔性臂的振幅逐渐增大,并做幅值为±2.5 V 的等幅振动,在10 s 时分别施加线性二次型最优控制和模糊控制后,柔性臂的振动幅度下降到±0.1 V 和±0.2 V。图10 为控制前后对应输出的频域曲线。可以看出,在一阶模态频率处柔性臂的振幅得到了较好抑制,且线性二次型最优控制相较于模糊控制具有较好的控制效果。

图10 控制前后对应输出的频域曲线Fig.10 Experimental result of sensor output with control in frequency domain
5 结 论
1)从系统辨识的角度研究了压电柔性臂的建模问题,采用实验辨识方法对压电柔性臂系统的传递函数进行辨识。为了定量对比辨识的结果和实际输出的匹配程度,引入了模型匹配度指标函数。结果表明,辨识得到的系统传递函数输出结果与实际结构响应的匹配度为95.22%。
2)基于控制理论和优化算法,引入线性二次型最优控制,将最优控制与遗传算法结合,针对加权矩阵难以解析的关键问题,将遗传算法应用于控制器的设计中,实施了加权矩阵的优化设计。为了对比优化参数下控制器的有效性,设计了模糊逻辑控制器。
3)开展了压电柔性臂在自由衰减和持续激励情况下的振动主动控制实验研究。实验结果表明,2 种控制算法对柔性臂的振动均有较好的抑制效果,且基于遗传算法的线性二次型最优控制效果更好。该方法可应用于其他柔性构件,对于柔性构件的系统辨识和振动抑制提供了一些借鉴和尝试。