一种手动膝关节牵引治疗仪设计
2021-03-03段惠斌赵其星王宏伟
段惠斌,赵其星,王宏伟
(河北工程大学,河北 邯郸 056038)
1 前言
医疗康复治疗是目前发展处于萌芽阶段,基于实际的需要,这里开发了一种膝关节牵引仪。很多人都患有膝关节的问题,其中一种常见问题是,当膝关节的受力变大,长时间站立会导致膝关节肌肉痉挛,压迫膝关节的软组织。另外,在人们的日常生活中,往往会因为各种意外导致软组织损伤,针对这些问题,本文设计一种机器,能够辅助治疗膝关节的损伤。
根据查阅的相关文献,以及到河北工程大学附属医院与医生交流得知,常用的辅助治疗方案为牵引治疗,需要治疗的患者往往是需要辅助治疗,并且有一定的行为能力,因此,针对这个疑问,本文探讨采用手动方案来设计膝关节牵引仪。采用手动方案设计膝关节牵引仪拥有以下优点:(1)该牵引仪控制简单,可操作性强。(2)牵引仪的成本较低,针对需要长时间辅助治疗的患者,可以购买,在家即可操作。(3)牵引仪的质量轻,便于运输。(4)牵引仪的可操作性强,减少了技术人员的参与,患者能够自行在家完成相关的牵引,或者在医院内自行完成治疗。另外,选择牵引架能够保护膝关节周围血液的运输,这有利于膝关节周围血淤起到化淤的作用,符合辅助治疗的理念。
2 总体设计
在膝关节牵引仪的总体设计中,良好的设计准则至关重要,在保证膝关节牵引仪满足使用准则的条件下,还要满足结构要求,机构要合理、经济效能好、拥有先进的技术、寿命长,可靠性高等优点。在本设计中,要遵循以下三个设计准则:系统性原则、合理布局原则、全面评价原则。
根据以上设计原则,确定整体的设计方案采用的是患者平躺,将患者的膝关节处进行固定,执行机构采用的是固定板进行固定,使用时在固定板的内部进行充气即可完成固定。
在本设计中,整体的设计方案如图1所示。
工作原理:实现牵引治疗时,先将人的身体和小腿进行固定,通过手臂摇动手轮将力矩传递到传动机构,传动机构将力矩传递到执行机构,小腿随着牵引仪的执行机构移动,最终使膝关节处进行拉伸,同时,依靠固定机构能够实现牵引仪的持续拉伸牵引。
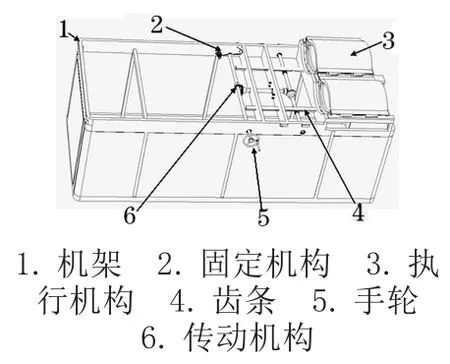
图1 膝关节牵引治疗仪模型图
3 执行机构的设计
首先,根据实际的需求,要对牵引仪的执行机构进行设想。执行机构分为两个小部分,一个小部分的作用是夹持固定,另一个部分是传动。针对夹持部分,由于夹持的是腿部,因此,在设计时,优先考虑的就是可伸缩的夹持装置。
由空间自由度计算的公式:

根据上述公式,最终计算出执行机构在牵引的过程中总共只有1个自由度,即在水平方向左右移动。整合设计的传动结构和执行结构,最终得到的结果如图2所示。
4 传动机构设计
根据任务书中的要求,这里拟采用的是锥齿轮-传动杆作为传动方案。采用斜齿轮传动能够很好地改变力的传递方向。在工业上,锥齿轮通常是用来传递两个相交轴间的动力,在机械上,锥齿轮两轴之间的交角一般为垂直关系。此外,根据使用要求,传动轴的长度大约为70cm左右。基于相关的机械设计,本设计采用如图3传动方案。

图2 执行机构固定部分设计效果图
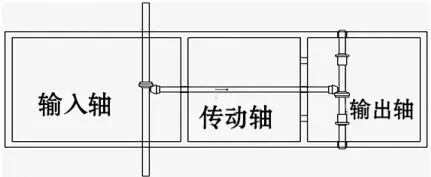
图3 传动方案的示意图
传动机构的整体设计完成后,对齿轮和轴进行计算,该计算的过程参考的是齿轮常用的计算方法。
针对轴的计算,首先,要确定轴的最小直径,根据公式可以确定出传动轴的最小直径为:
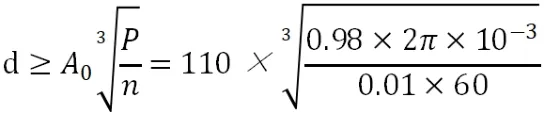
此外,根据轴在实际使用的过程中与各个零件配合,以及轴的位置进行校正,最终确定轴的机构。最后,根据轴的受力特点,对轴的受力进行校核。
齿轮的设计:
在设计齿轮时,根据使用的条件对齿轮进行设计,首先,确定齿轮的最小分度圆直径,计算的公式为:
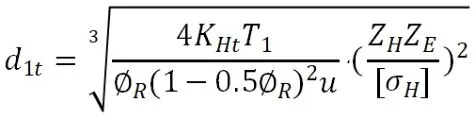
根据设计手册,确定出齿宽系数、区域系数、弹性影响系数以及大小齿轮的疲劳极限。初步确定出齿轮的分度圆直径后需要计算齿轮的模数,然后,根据齿根弯曲强度计算齿轮的模数,计算公式为:
然后,对比两次计算齿轮的模数,选择比较大的模数作为传动齿轮的模数。结合设计齿轮的传动比,可以确定出齿轮的结构。
5 固定机构的设计
根据治疗的要求,在使用牵引仪时,患者可能需要持续的牵引,在设计时,需要满足患者的需求,每次牵引的时间大致为15~20分钟。为此,根据实际的需求,设计时需要考虑到如何固定。针对固定装置在使用过程中遇到的问题,在文中进行了叙述,最后,本设计中的固定装置采用的是棘轮机构。
工作原理:该固定装置的固定原理是为了在患者进行持续牵引的过程中提供方便。由于输入轴的旋转方向为逆时针(从左向右),从而会产生一个反向的旋转力。而设计的齿轮轴和卡盘两者的齿轮是相互卡死的。在使用的过程中,只需要将卡盘放下即可,患者需要放松的时候,只需要将卡盘抬起即可。其结构形式如图4所示。
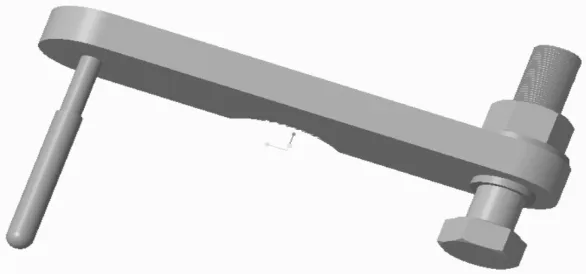
图4 固定装置装配图
