基于O-PPN的装备体系任务线程建模与分析
2021-03-02陈宇奇徐廷学赵潇童逯程
陈宇奇, 徐廷学, 赵潇童, 逯程
(1.海军航空大学 岸防兵学院, 山东 烟台 264000; 2.陆军装备部 驻沈阳地区第二军代室, 辽宁 沈阳 110000;3.海军装备部 装备保障大队, 北京 100089)
随着“网络中心战”的提出,当前对于单一装备系统的运行性能和作战效能分析与研究无法满足该作战要求,从而产生了体系[1-4](system of systems,SoS)和体系工程[5-6](system of systems engineering,SoSE)的概念,关于体系的定义有很多,但大同小异,本文将武器装备体系(weapon system of systems,WSoS)定义为为完成作战任务,将功能上相互依赖、运行上相互独立的各类武器装备系统以松耦合的形式聚合起来,通过各系统间的协同配合提供所需能力的更高层次网络化复杂系统(以下简称装备体系)。其中,装备体系所能提供的能力是任意单一组成系统不具备的,单一组成系统性能的退化或失效会导致装备体系性能水平或能力发生降级。
装备体系由具体的使命任务驱动,包含相应的任务时间、任务地点等要素,体系内的各装备系统由于任务的相关要求,需要相互配合和交互,通过良好运行提供不同功能,形成装备体系的各种能力,从而保证任务的完成。因此,需要对装备体系的使命任务以及体系内各装备系统承担的相应作战活动进行描述,构建装备体系的一般任务线程,从而更好地对装备体系的作战效能及作战适应性进行评估和分析。
美国国防部为准确把握体系中各系统间的相互关系,构建了任务线程研讨厅[7-9](the mission thread workshop,MTW),对体系中各任务和相应的参与系统及其交互等信息进行描述。潘星等[10]将体系的作战任务描述为包含目标、装备、活动和关系的四元组,从而构建装备体系的任务模型,并进行了相应的仿真。王宏宇等[11]以空中突击部队装备体系为例,在美国国防部体系架构框架(department of defense architecture framework,DoDAF)下,建立了相应的任务静态和动态模型。目前在体系任务建模的研究上虽然取得了一定进展,但一般将装备体系中的各系统定义为“二态”系统,未考虑其复杂的性能退化过程,因此对于任务成功与否的判定较为简单,因此,本文将针对装备体系内装备系统的多态性[12-14],构建相适应的装备体系一般任务线程。
1 装备体系任务形式化描述
任务线程是为了完成一个或多个装备体系的能力而执行的各类作战行动或事件的序列。装备体系根据不同的作战任务需要提供不同的作战能力,而体系的作战能力是体系内各装备系统相互协作、相互依赖形成的结果,各装备系统在提供相应功能的同时必然产生各类作战行动以支持任务的执行,行动间的时序逻辑关系也会对任务成功与否产生一定影响,因此在构建任务线程之前,首先应对装备体系的作战任务进行形式化描述,主要包含任务目的、任务时序关系、任务执行主体、任务能力、任务活动及任务关系等5类参数,如表1所示。

表1 装备体系任务描述参数
一般来说,要完整描述装备体系作战任务还需其他参数[15],如任务威胁参数、任务时间参数及任务空间参数等,但本文仅考虑体系中各装备系统性能状态水平与作战行动要求之间的相互关系对体系任务完成能力的影响,故仅选取表1中的参数对体系作战任务进行描述。此外,对于行动间关系而言,主要包含6种关系,具体如表2所示。

表2 行动间关系分类
(1)
(2)
(3)
2 装备体系任务线程建模
从上节可知,装备体系使命任务能否顺利完成,与承担作战行动的装备系统的当前性能水平关系密切,因此需构建一种描述装备系统性能状态的任务线程模型,当前在构建装备体系任务模型的研究中,DoDAF和IDEF3(ICAM definition method)的应用较为广泛,且取得了不错的进展,DoDAF[16]可以很好地描述体系使命任务中信息、活动、节点、角色和对象等任务要素,构建相应的任务静态模型,IDEF3[17]过程流模型在任务动态和仿真模型的构建方面有着较大的优势,但两者在描述装备系统性能状态方面存在薄弱环节。Petri网起初作为一种复杂系统网状信息流的表达模型,可以通过严格的数学定义和图形方式描述装备系统性能状态变化,而且根据其构建的理论基础,可以较好描述体系使命任务中各作战行动的执行过程、逻辑关系及完成条件,并能很好体现装备系统性能状态对任务完成与否的影响,因此本节结合上节对体系任务的形式化描述,结合IDEF过程流,提出一种基于Markov的行动-性能Petri网(operation-performance Petri net,O-PPN)对装备体系任务线程进行构建。
2.1 问题描述与假设
不同装备体系所执行的任务种类有所不同,大体分为确定性任务和不确定性任务。在确定性任务中,存在一类事先计划周详且固定的任务,如巡逻勘察、目标识别、摧毁某固定目标等任务,不存在敌方力量打击和战斗损伤,其任务的成功与否仅与装备系统之间协同成都好坏及自身性能状态好坏决定,为构建考虑装备系统性能状态水平的装备体系任务线程模型,作出如下假设:①装备体系执行任务期间不考虑时间因素,即仅考虑任务及作战行动能否完成,不设定相应的任务持续时间和任务要求时间;②假设装备体系内所有装备系统相互独立,其任意性能状态逗留时间均服从指数分布;③假设装备体系内所有装备系统均为可修系统,其相应维修过程均服从指数分布,维修方式包括完全维修、不完全维修及视情维修等;④仅针对体系作战任务中的确定性任务,事先进行过充分规划,相应的维修资源充足,不考虑各装备系统间存在维修资源竞争;⑤各装备系统按作战任务要求执行各自的作战行动,没有相应的冗余系统和替代系统。
2.2 基于Markov的O-PPN建模
2.2.1 O-PPN建模元素的图形化表示

由于TOFD和相控阵是不同的检测技术原理,所以两种技术也存在各自的优缺点。在这里阐述各自的优缺点,并根据其特点解决现场的问题。
在装备体系任务线程O-PPN模型中,其元素、符号以及相应描述如表3所示。
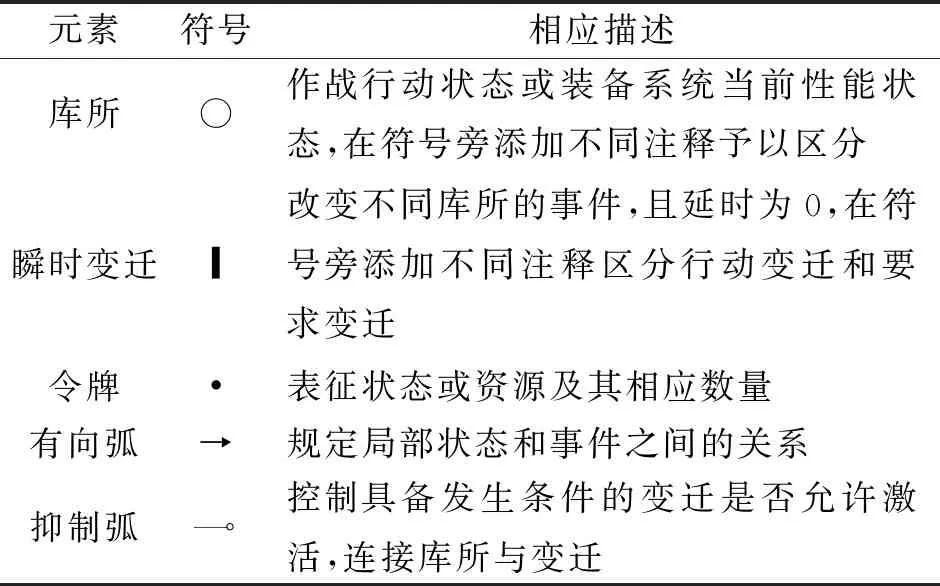
表3 O-PPN建模元素的图形化表示
2.2.2 装备体系任务线程O-PPN建模分析
装备体系的作战任务可分为若干按顺序执行的阶段任务,采取IDEF3过程流中的若干泳道表示不同的任务阶段,每个阶段任务包含若干由不同装备系统承担的作战行动,每一个作战行动能否被执行取决于两方面,一是相应装备系统的当前性能水平是否满足该作战行动的性能要求,而装备系统的性能水平受环境和自身因素影响会发生变化,只有装备系统的当前性能状态大于等于所执行作战行动的性能要求,该作战行动才可以被执行。二是之前的作战行动是否按照相应的逻辑关系被成功执行,若失败,则无法激活当前作战行动开始执行。
2.2.2.1 基于Markov的装备系统稳态性能分析

图1 系统性能与作战行动的关系
1) 装备体系内包含ne个多状态装备系统,且各装备系统的维修过程和退化过程相互独立,部分装备系统存在提前状态0;

3) 多状态装备系统MEm的性能状态一般从最佳状态1开始,其性能状态转移的初始条件为

(4)
根据以上假设,建立如图2所示的多状态装备系统在完全维修、不完全维修及视情维修条件下的性能状态Markov过程。

图2 多状态装备系统在不同维修方式下的Markov过程
由图2可知,完全维修和不完全维修其实可以看作是视情维修的2种特殊情况,由于篇幅有限,本节仅针对视情维修条件下装备系统性能状态构建相应的微分方程,文献[20]基于Markov模型对视情维修条件下多状态控制单元进行了可用性建模,但未考虑某些系统单元可能存在提前状态的情况,根据假设(2)及图1可得,存在提前状态的装备系统MEm其状态退化顺序为1,0,2,3,…,nm,因此对文献[20]中的微分方程组进行一定改进,得到关于装备系统MEm各状态概率的微分方程组
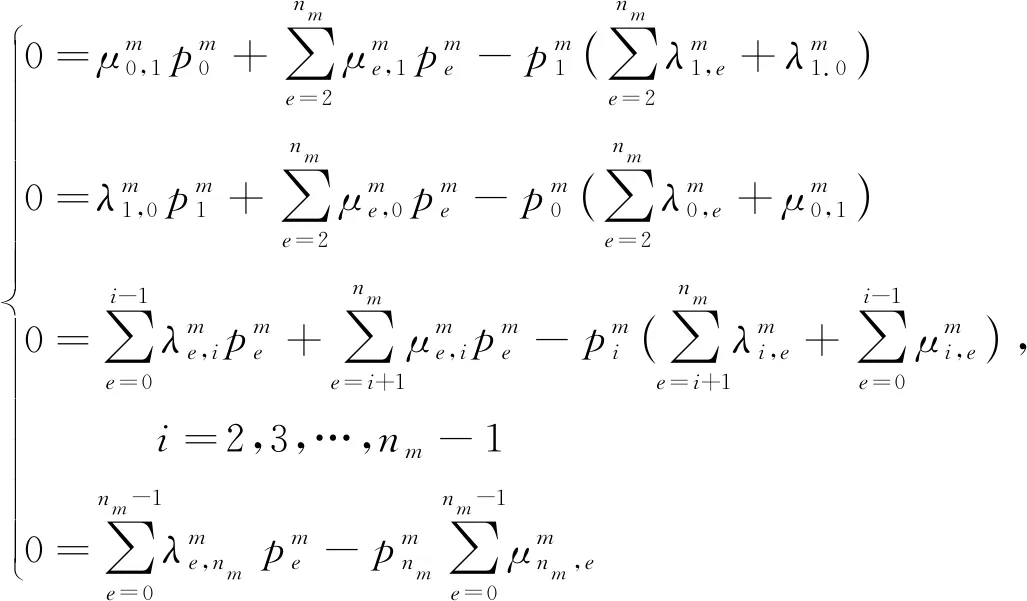
(6)
2.2.2.2 作战行动间逻辑关系分析
根据本文对装备体系作战任务的形式化描述,将作战行动间逻辑关系分为顺序关系、与关系、或关系、条件关系、并发关系和表决关系,其具体含义不再赘述。这里规定作战行动库所中的未执行状态库所的激活需要之前的作战行动均处于开始执行状态并按照相应逻辑关系成功执行,而后依据装备系统的性能库所相关信息,决定是否激活作战行动开始执行状态库所。

图3 逻辑“顺序” 图4 逻辑“与”图5 逻辑“或”

图6 逻辑“条件” 图7 逻辑“并发”图8 逻辑“表决”(以2/3表决门为例)
1)顺序关系;2)与关系;3)或关系;4)条件关系;5)并发关系;6)表决关系。
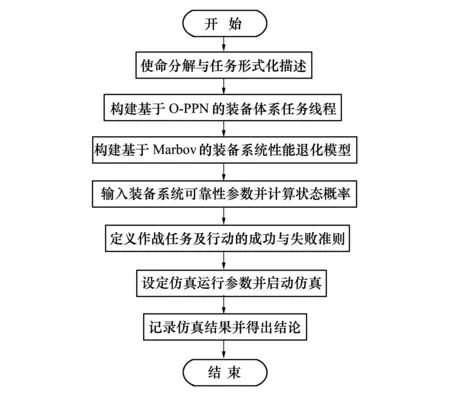
图9 装备体系任务线程仿真流程
2.3 装备体系任务线程仿真
在完成装备体系任务线程建模工作基础上,可利用matlab仿真软件,结合相应案例,构建装备体系任务线程仿真模型,其仿真建模流程如图9所示。
3 案例分析
3.1 装备体系任务线程构建
以文献[21]中所给出的航母体系摧毁敌岸基目标任务为例,该任务的形式化描述如表4所示。
这里规定任务成功的准则为该任务中所有必经作战行动必须全部完成,任一必经作战行动未完成则视为任务失败。这里不考虑指挥和电子对抗对任务成功的影响,因此假定EC和CC的可靠度均为1,且该任务中执行不同作战行动的同一装备系统的性能参数假定一致。

表4 航母体系摧毁敌岸基目标任务的形式化描述
尔后在对该任务形式化描述的基础上,结合O-PPN建模的相应步骤,构建航母体系摧毁敌岸基目标的任务线程,如图10所示。
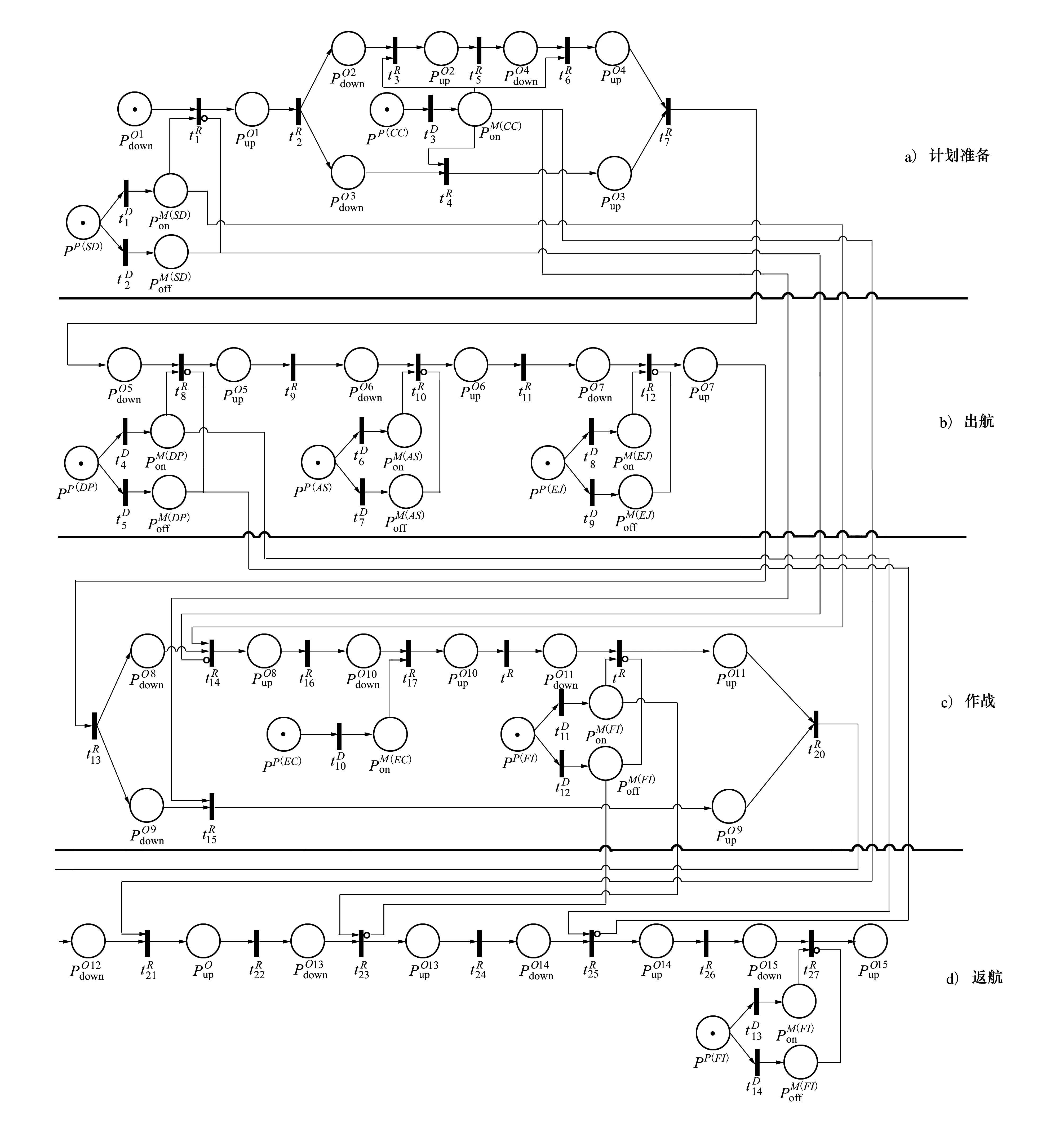
图10 基于O-PPN的航母体系摧毁敌岸基目标任务线程
3.2 装备体系任务成功性分析与计算
在该任务中,同一装备系统在不同任务阶段执行不同作战行动需要达到的行动要求可能不同,因此在任务线程中使用不同的要求变迁加以描述,从上图可以看出,除作战系统外,其余各系统在整个任务中的性能要求保持不变。
这里假设各装备系统均处于视情维修条件下,根据各装备系统的性能状态相关信息,可以分别构建各装备系统的基于Markov稳态状态模型。表5为航母体系内各装备系统不同状态间的转移率参数,图11为SD、DP、FI、AS及EJ处于各自不同状态的概率结果。
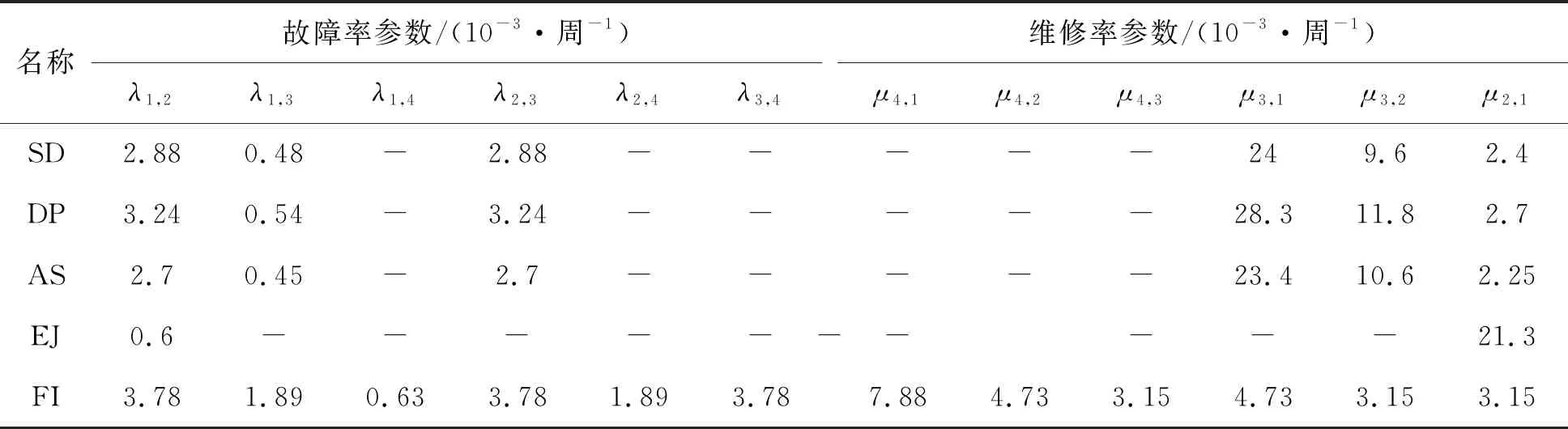
表5 体系内装备系统不同状态间的转移率参数
通过(4)式、(5)式可得到各装备系统按性能水平由高到低次序排列的稳态概率集合,如表6所示。
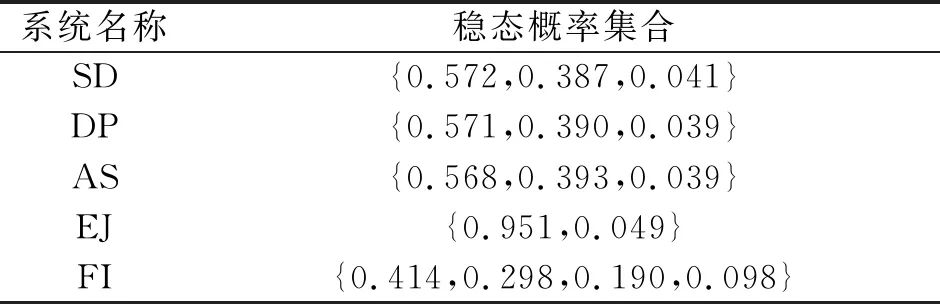
表6 装备系统性能状态的稳态概率集合
根据上述输入数据,运行仿真模型500次,所得仿真结果为任务成功221次,任务失败279次。作战行动能否完成,取决于承担该行动的装备系统当前所处性能状态是否大于活动要求的概率,假设作战行动的成功概率为POi(i=1,2…,n),根据该案例相应的任务线程,可由下式计算该作战任务的理论任务成功概率P理论
P理论=PO1PO5PO6PO7PO8PO11PO13PO14PO15
而该作战任务仿真得出的实际任务成功概率P实际为
P实际与P理论之间的误差Δ误差的计算公式如下所示
由此可得该作战任务的理论任务成功概率P理论=0.449 7,实际任务成功概率P实际=0.442 0,两者间的误差Δ误差=1.7%,因此该结果具有可信性。
3.3 与现有建模方法的对比与分析
文献[10]将美国国防部体系结构框架DoDAF与IDEF3相结合,提出了基于活动建模的装备体系任务静态模型建模方法,由该方法可得本案例中各装备系统完好和故障的稳态概率集合,如表7所示。

表7 装备系统完好和故障的稳态概率集合
输入上述数据,利用文献[10]的方法进行仿真运算,计算实际任务成功概率,得到相应的任务成功性曲线,并与本文方法进行对比,如图12所示。
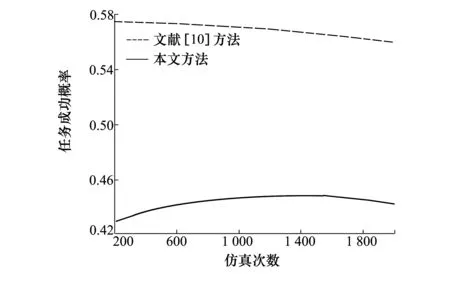
图12 建模方法所得结果的对比
由图12可知,根据文献[10]的方法所得的任务成功概率大约为0.569,而本文方法所得的任务成功概率约为0.442,这是因为文献[10]方法未考虑装备系统多态特性,仅简单以装备系统的故障与完好作为体系任务成功与否的判据,忽略了体系任务过程中性能要求的可变性,导致计算结果偏高,不利于后续对装备体系开展相应的维修决策工作,而本文方法针对这一不足进行改进,提高了系统性能分析的精细程度,可为不同装备系统在执行体系作战任务过程中采用何种维修策略提供一定指导。
4 结 论
装备体系任务线程建模与分析是对装备体系进行任务成功性分析和维修决策研究的基础和前提。本文基于现阶段装备体系任务建模方面的主要研究成果,给出了考虑系统性能水平的装备体系任务描述模型,并基于O-PPN和Markov构建装备体系静态任务线程,着重考虑体系内各装备系统多状态的特性,依据所提出的装备体系任务线程仿真步骤对实际案例进行了分析与应用,验证了模型和方法的有效性,为下一步构建考虑时间因素的装备体系动态任务线程提供一定指导。
