分布式动力系统参数对翼身融合布局无人机气动特性的影响
2021-03-02张阳周洲王科雷范中允
张阳, 周洲, 王科雷, 范中允
(西北工业大学 航空学院, 陕西 西安 710072)
常规布局飞机在气动效率方面的设计潜力越来越有限,而翼身融合(blended wing body,BWB)布局飞行器以其更小的浸润面积、良好的气动效率、节能减排及低噪音污染等方面的优势进入研究者的视野[1-2]。NASA早在2009年便提出了N+3客机计划,力求在2035年使客机的油耗降低60%[3]。同时,分布式电推进(turbo-electric distributed propulsion,TeDP)系统在近年来受到越来越多研究者的关注,被认为是下一代民机设计最具潜力的动力布局形式之一[4-5],与传统动力形式相比,分布式推进系统具有增加载运量,提高升阻比以及降低油耗,尾气排放量和低噪声等优势,并且能够与BWB布局形成良好的契合。
在BWB布局与分布式推进系统结合的背景下,边界层吸入(boundary layer ingestion,BLI)效应[6-8]逐步进入研究者的视野。气流在经过BWB中心体后边界层完全发展,被吸入发动机后具有进一步降低飞机阻力、降低发动机需用功率、提高发动机推进效率、降低发动机耗油率等潜力。同时,可以利用康达效应(Coanda effect)使得气流边界层的附着得到改善,进一步提高机体的升力,减少起飞或降落时的滑跑距离。而分布式推进系统不仅能够使飞行器在气动性能方面有所提升,更可以提高全机设计过程中的设计空间[9],例如采用多个小尺寸涵道风扇不会引起质量的增加,单个涵道风扇在较宽的转速范围内都能保持较高效率等。这些都具有显著提高飞机综合性能的潜力。
国内外对耦合分布式动力系统的BWB飞机进行了以下的研究工作。Rodriguez[10]通过与常规吊挂式发动机布局对比,发现采用分布式动力的BWB飞行器的推进效率能提高2%以上,证明了该布局的潜在优势。Giuliani[11]研究了对涵道风扇作用下边界层吸入进行了数值模拟,进一步分析了BLI效应的流动机理。Lundbladh[12]从总体设计的角度研究了发动机的数目对采用分布式动力BWB飞行器的巡航效率和油耗的影响,发现埋入式动力系统能够减小起飞质量并降低油耗。Wick等[13]对比了翼下布局的分布式动力推进系统与常规发动机的差异,分析了分布式动力的数量等参数对全机的气动影响。Mantic等[14]给出了亚声速飞行条件下考虑BLI效应的翼型设计,研究了流量系数、来流攻角、整流罩长度、进气道高度和进气道位置等参数对翼型升力特性和发动机进气品质的影响。
本文对耦合分布式动力系统的BWB布局无人机的涵道风扇数量、尺寸、推力大小等动力系统参数进行了研究,以巡航及起飞状态为研究背景,基于计算流体力学(computational fluid dynamics,CFD)方法,使用商业软件Fluent分别对动力构型WPN(with power nacelle)和通气构型TFN(through flow nacelle)在不同动力系统参数以及巡航/起飞状态下的气动性能进行了研究分析。通过计算NASA涵道螺旋桨的拉力系数及截面静压、速度分布,验证了本文动力系统数值计算方法的高效、可靠性;然后研究了全机WPN/FTN构型的气动特性,巡航状态下动力系统尺寸参数对全机气动特性的影响;最后分析了起飞状态时动力系统推力参数对起飞性能的影响等。
1 几何模型及数值计算方法
1.1 几何模型及数值计算方法
参照小型无人机总体设计指标,计算对象为耦合分布式动力系统的BWB布局无人机。该布局由中心体,融合(内翼)段,外翼段,翼尖组成;动力系统半埋于机体后部沿展向排布,由进气口,动力段,排气口构成。无人机各向视图如图1所示。

图1 气动布局外形
本文数值方法基于S-A湍流模型求解雷诺平均Navier-Stokes(RANS)方程,采用SIMPLE压力-速度耦合求解器,空间离散方法采用二阶迎风(second order upwind)格式,时间推进采用一阶隐式(first order implicit)方程。
动力系统采用动量源方法(momentum source method,MSM)进行数值模拟。该方法首次由Rajagopalan等[15]在1985 年提出,该方法对多桨叶旋转运动复杂流动问题具有一定的可靠性和高效性。动量源方法用薄盘代替桨叶,在薄盘内采用叶素理论对桨叶载荷进行计算,转换成动量源项,加入Navier-Stokes方程进行求解,以此对桨盘进行模拟。此方法可以显著减少计算成本,并可以得到较为准确的速度和压力分布。
1.2 动力模型计算验证
为验证本文使用的动量源方法的可靠性,本节以NASA涵道螺旋桨的风洞数据[16]进行方法校验。该涵道螺旋桨为三叶桨构型,几何外形如图2所示,螺旋桨直径0.381 m,实验转速8 000 r/min,桨叶翼型为NACA6412。
图2 NASA涵道螺旋桨模型
本节分别采用多重参考系(multiple reference frame,MRF)方法与动量源方法对该模型进行数值计算,计算条件与实验保持一致,远场自由来流速度1.626 m/s。计算结果如表1所示,图3为2种数值方法计算得到的涵道螺旋桨对称剖面压力云图与流线形态。

表1 计算与实验结果对比
可以看到,MSM方法与MRF方法计算得到的拉力系数与实验值的误差在5%以内,满足工程应用的要求。由于MRF方法计算存在实体桨叶模型,桨叶前后存在静压及流速的较大变化,与MSM方法计算得到的涵道内部的流动略有差异。但是2种方法得到的涵道螺旋桨入口及出口附近的流动速度、静压变化近乎一致。
受简化假设限制,MSM方法尽管存在一定的计算误差,但是计算效率较高,满足全机动力构型的计算需求,故在下文使用该方法对动力系统进行数值模拟。
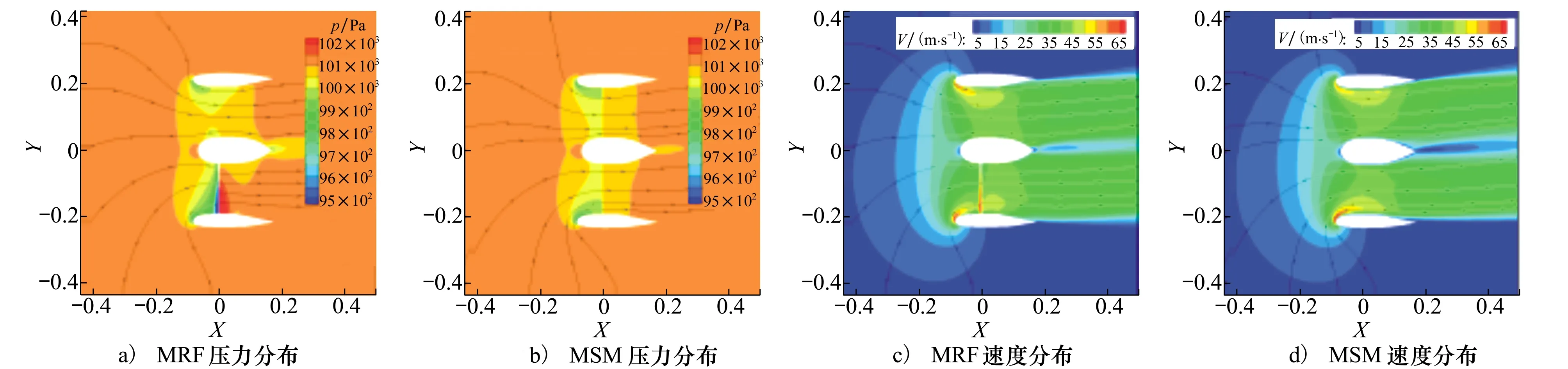
图3 MRF/MSM方法截面压力与速度分布
1.3 网格无关性验证
为了验证本文采用的网格和数值方法,对装配D80涵道风扇的构型在高度H=3 km,V=27.78 m/s(Ma为0.084 5),迎角4°的状态进行了计算。全机采用的动力系统总推力为F=12 N,由于数值模拟使用半模计算,故设置动力系统总推力为6 N。动力单元(涵道风扇)采用动量源方法模拟,动量源项数值如表2所示。
首创精神、奋斗精神及奉献精神是对“红船精神”的高度凝练和深刻总结,彰显了共产党人勇于走在时代前列的责任担当,彰显了共产党人“为中国人民谋幸福,为中华民族谋复兴”的初心和使命。

表2 不同推力对应的动量源项
划分4种不同规模的网格进行数值计算,设置各个网格第一层网格高度一致,均为d1=1.26×10-5m,并保证y+=1。4种规模网格的气动特性计算结果如表3所示。
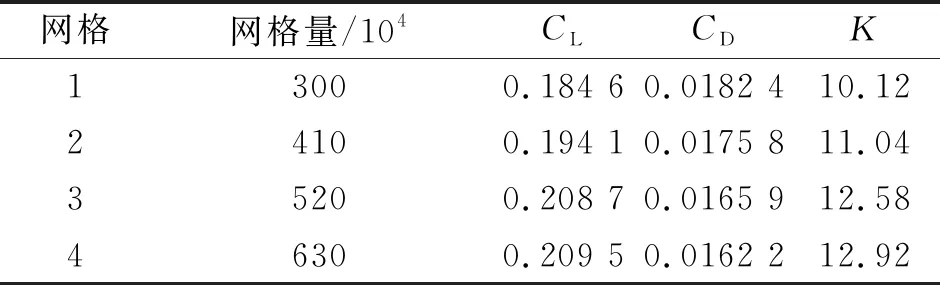
表3 网格无关性验证
可以看到,网格3、网格4在升力系数、阻力系数方面的差别已经非常小,达到了网格无关性的要求,综合考虑计算精度与效率,本文选择第3组网格规模对几何模型进行数值计算。网格划分如图4所示。
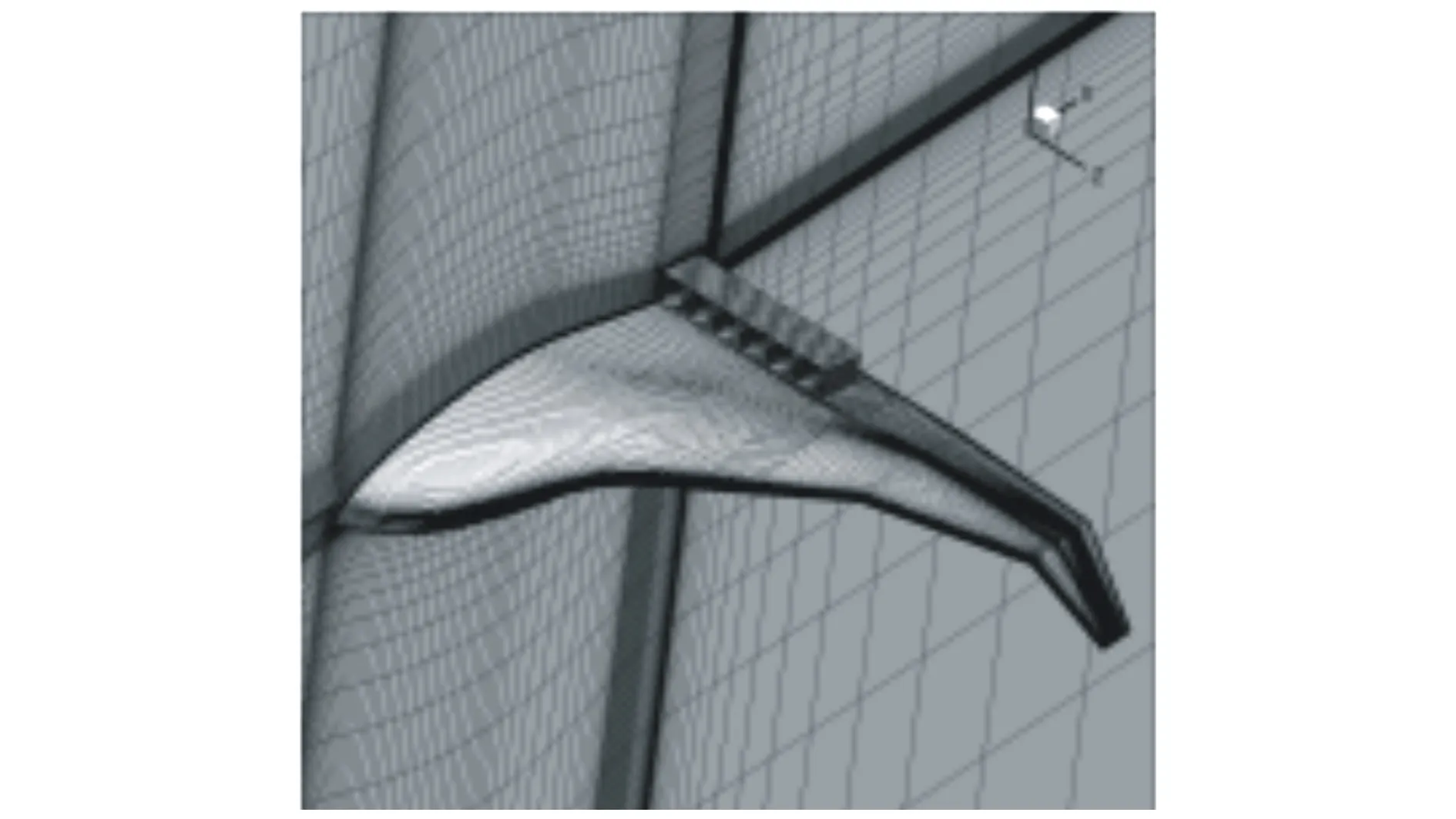
图4 结构网格划分
2 分布式动力BWB布局巡航特性
本节以装配D80涵道风扇的全机WPN/TFN构型进行气动特性分析,研究了耦合分布式动力系统的BWB布局形式在气动方面的优势,以及动力系统尺寸参数对全机气动特性的影响。
2.1 WPN/TFN全机构型的气动特性
在高度H=3 km,来流速度为V=27.78 m/s(Ma为0.084 5)的巡航状态,对装配D80涵道风扇的全机WPN/TFN构型进行了数值计算,得到如图5所示的气动特性曲线。

图5 D80全机WPN/TFN构型气动特性对比
需要说明的是,在衡量构型整体气动效应时,计算得到的外部气动力和内部气动力都应该考虑。由于本文WPN构型采用了简化的动力模型,理想推力仅仅是质量流量乘以动力系统喷流速度与自由来流之差,这个理想推力代表的是除去黏性损失及干扰效应的推力值。以该值作为参考推力,系统中所有推进损失均记作阻力[13]。本文中的推阻划分以此为标准,将全机阻力D及升阻比K重新修正如下
qm=ρVpA
(1)
DT=T-Tideal=T-ΔVqm
(2)
D=D′+DT
(3)

(4)
可以看到,相比于TFN构型,WPN构型整体升力特性有所改善,同等迎角下升力系数提高了约16%,而2种构型的升力线斜率基本一致,可用迎角范围较宽,在计算迎角内未出现全机失速现象。WPN构型阻力较高,但是在小迎角范围内差别较小,故其升阻比在小迎角范围内明显高于TFN构型,最大升阻比提高了约10%。说明该气动布局形式在分布式动力系统的作用下具有良好的升力特性和升阻比特性。
通过对流场细节进行分析来进一步研究WPN构型的气动特性。图6为2种构型分别在迎角8°,10°,12°的表面极限流线图(左图为WPN构型,右图TFN构型),图7至8为3个迎角下展向特征截面处的压力分布与压力云图对比。

图6 3个迎角下全机WPN/TFN构型极限流线
由图6可以看到,对比TFN构型,WPN构型全机上表面静压有所下降,在动力系统进/出口及内外翼过渡段附近尤其明显。在涵道风扇抽吸作用的影响下,中心体表面流线沿弦向流动良好,气流的展向流动受到了一定程度抑制,而在内外翼过渡段的流动则较早发生分离。
在特征截面Z/b=0及Z/b=0.029处(见图7a)和图8)),TFN构型在涵道风扇入口处对气流形成了一定的阻滞作用,高压明显;而WPN构型在动力系统工作的状况下抽吸作用显著,涵道风扇入口附近的静压更低,特征截面上表面的低压区域更大,但是在截面后缘附近高压区域则更大。在特征截面Z/b=0.56处(见图7b)),8°迎角时WPN构型对应的翼型剖面前缘吸力峰更高,上表面静压更低,产生了更大的升力;而在10°迎角时,WPN构型翼型剖面出现了流动分离,其上表面压强在15%C之后几乎不再变化,形成典型的大迎角分离流态,与对应的TFN构型翼型剖面压力分布形成明显对比;迎角继续增大到12°,2种构型的翼型剖面均发生流动分离,由于WPN构型流动分离出现地更早,其影响区域更大(如图6c)所示)。由于动力系统在机身展向影响的衰减,在特征截面Z/b=0.94处(如图7c)所示)2种构型对应的压力分布几乎重合。

图7 3个迎角下全机WPN/TFN构型展向截面的压力分布
图9为3个迎角下沿弦向X/L=0.645处特征截面(动力系统进气口附近)的压力分布。可以看到,WPN构型在动力系统的影响下,涵道风扇唇口附近的压强更低,在流动未发生分离(8°迎角)时内外翼段产生的升力也更大,此时的全机升力由中心体及内外翼共同贡献;而随着迎角增大出现流动分离后,WPN构型内外翼过渡段附近上表面的静压先降低后增大,升力有所损失,但是与TFN构型相差不大,可以认为大迎角飞行时全机升力主要由动力系统影响下的中心体升力决定。
WPN构型在内外翼过渡段较早出现流动分离主要有以下两方面原因:一方面由于动力系统的抽吸作用,涵道风扇出口处的高压使得内翼后缘附近静压升高,导致内外翼过渡段逆压梯度增大,流动更容易发生分离;另一方面由于机身几何外形的展向过渡有较大转折,外翼及翼尖后缘的前掠,使得气流向内外翼过渡段流动,气流的不断堆积造成流动附着状况变差。
通过WPN/TFN 2种构型的对比,可以看到BLI翼身融合布局在分布式动力系统影响下具有一定的增升优势,中心体的气动特性有所改善。下面研究不同动力系统尺寸参数对全机气动特性的影响。

图9 3个迎角下全机WPN/TFN构型弦向截面X/L=0.645的压力分布
2.2 动力系统尺寸参数对全机的气动影响
为研究不同动力系统参数对全机气动特性的影响,基于动力系统总推力一致的假设,分别对装配3种不同尺寸涵道风扇(D80/D120/D150)的全机构型进行了建模与计算,动力系统参数的对比参见表格3,3种构型的气动特性如图10所示。
可以看到,3种构型升力特性差异较小,同等迎角下升力系数相差在3%以内。在阻力方面,中小迎角范围内涵道风扇尺寸越大,全机阻力越大,随着迎角增大各构型阻力系数趋于一致。由于升力相差不大,全机升阻比的大小取决于阻力的大小,故D80构型的最大升阻比较大,在8°迎角时接近11,比D150构型提高约15%。这说明多个动力单元会带来更多的气动优势。
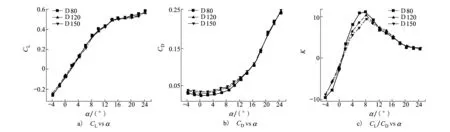
图10 3种动力系统构型的气动特性
进一步分析动力系统尺寸参数对几种构型气动特性影响的机理,对4°迎角下的特征截面压力分布及压力云图进行分析,如图11至12所示。可以看到,在特征截面Z/b=0及Z/b=0.029处(见图11a)、图12)),3种构型中心体剖面翼型的前部静压值差别不大,由于在同等推力时较小尺寸的涵道风扇具有较大的桨盘载荷和抽吸速度,故随着涵道风扇尺寸的增大,涵道风扇入口附近的高压区域增大,截面翼型上表面负压减小,而涵道壁面上的负压变大,使得几种构型的升力差别不大;截面翼型后缘附近的高压区域则随着涵道风扇尺寸的增大而减小,使得D150构型压差阻力变大。内外翼过渡段的各构型压力分布差别不大,但同样是D80构型上表面负压较大(如图11b)所示)。随着展向距离变大,在特征截面Z/b=0.94处(如图11c)所示),动力系统对机翼表面流动的影响越来越小,各个构型剖面翼型压力分布近乎重合。

图11 3种构型展向特征截面的压力分布

图12 3种构型Z/b=0.029截面处的压力云图
从以上分析可以看出,不同动力系统尺寸参数的全机构型在气动效果方面的差异主要在于涵道风扇桨盘载荷的不同。当涵道风扇推力相同时,其尺寸越小,桨盘载荷越大,进出口静压越小、压差越大,同时使得气流流速更大,进出口流速差也越大。对于耦合分布式动力系统的BWB布局无人机来说,涵道风扇尺寸越小,对全机上表面静压的减小越有益处,气动特性越良好。
3 分布式动力BWB布局起飞特性
本节研究起飞状态下分布式动力系统推力参数对全机气动特性的影响。起飞状态全机迎角为8°,来流速度V=15 m/s。由于起飞时来流速度较低,动力系统推力参数成为影响全机气动特性的关键因素。对装配D80涵道风扇的构型分别在总推力T=6,8,10 N进行计算,得到如图13所示的气动特性曲线。

图13 不同推力下全机起飞的气动特性
可以看到,全机在不同推力时的升力线斜率保持一致,在T=10 N时有较大的升力系数,相比于T=6 N提高了20%。随着动力系统推力的增大,全机阻力增大明显,T=10 N时阻力系数增大了约18%,导致其在8°迎角时的升阻比降低了约6%。以下通过不同推力对特征截面压力分布的影响进行进一步分析,如图14所示。

图14 不同推力下全机起飞时展向截面的压力分布
通过Z/b=0及Z/b=0.029处的特征截面压力分布和压力云图(见图14a))可以看到,动力系统推力的大小主要影响中心体中后部的静压,中心体中部的负压区域面积随着涵道风扇推力的增大而增大,并且逐渐向涵道风扇唇口附近延伸,而涵道风扇唇口附近负压区域也在变大,使得整体升力提高;但同时抽吸效应的增强使得喷流静压变小,构型前后压差变大,使得整体阻力变大。而几种推力下特征截面Z/b=0.56及Z/b=0.94处的压力分布(见图14b)和14c))几乎没有差异,说明涵道风扇推力的变化对外翼及翼尖的影响十分有限。
总的来说,对于起飞状态,增大动力系统推力可以降低机身上表面气流分离的可能性,全机升力进一步增大,具备提高起飞质量的能力,但同时阻力随着前后压差的增大而增大。
4 结 论
本文针对耦合分布式动力系统的BWB布局无人机动力系统参数为研究对象,首先研究了WPN/TFN全机构型气动特性的差异,然后在动力系统同等推力的前提下,通过对巡航状态下全机的气动特性研究,探究了动力系统尺寸参数对全机的影响,最后研究了起飞状态下动力系统推力参数对全机起飞性能的影响,得到以下结论:
1) BWB布局飞行器在分布式动力系统的作用下具有良好的气动特性,相比于TFN构型,WPN构型有效提高了机身附近的流速,同时一定程度上抑制了气流的展向流动,全机的升力系数提高了约16%,升阻比提高了约10%;
2) 动力系统尺寸参数对全机的气动影响主要体现在涵道风扇桨盘载荷的差异,其尺寸越小,桨盘载荷越大,进出口静压越小,引起流速、进出口速度差越大;对全机气动特性来说,涵道风扇尺寸越小,全机压差阻力越小。相比于D150构型,D80构型的升阻比达到11,提高了约15%;
3) 起飞时全机迎角较大而速度较小,动力大小成为影响全机气动特性的关键因素。增大动力系统推力可以降低机身上表面气流分离的可能性,全机升力进一步增大,具备提高起飞质量的能力,同时阻力随着前后压差的增大而增大。
