焊接机器人职业技能培训鉴定教材的研究与开发
2021-03-01黄春榕黄瑞生黄栋方乃文李波孙明辉
黄春榕,黄瑞生,黄栋,方乃文,李波,孙明辉
1.福建省特种设备检验研究院 福建福州 350028
2.哈尔滨焊接研究院有限公司 黑龙江哈尔滨 150028
1 焊接机器人职业技能教材开发背景
1.1 焊接机器人产业与技术
目前,高质量发展带来的制造业深刻变革正全面改变我国的产业结构和生产方式[1,2]。但是,国内焊接机器人专业人才缺口巨大,据统计2020年国内焊接机器人专业人才缺口将近150万人[3]。同时,焊接机器人职业技能培养体系还在起步阶段,焊接机器人职业人才标准体系尚需进一步完善,相关培训和鉴定教材等教学体系还不完备,这些都是制约焊接机器人技能人才培养的重要因素。因此,如何建立完善焊接机器人职业技能培训体系、加强技能人才鉴定考核工作是当前我国焊接机器人教育亟待解决的关键问题。
1.2 焊接机器人职业技能教材开发意义
2018年,中国焊接协会牵头起草的《国家职业技能标准——焊工》正式发布,该标准将焊接机器人的相关技能要求进行了明确。但是,焊接机器人职业技能体系中具体的培训内容、方法以及考核标准等还亟待进一步完善。特别是职业技能培养的教学体系、质量标准和考评体系的不完善,让相关职业院校、培训机构在人才培养及能力评定等方面缺乏科学的参照和依据,从而导致技能人才培养质量参差不齐。因此,焊接机器人职业技能培训和鉴定教材的开发,能够大力推动焊接机器人职业教育的用人、育人、考核及保障4个环节标准化工作[4-6],发挥教材在焊接机器人职业教育质量提升中的重要意义。
1.3 焊接机器人职业技能培训教材编写背景
由于我国在焊接机器人应用技术方面起步较晚,所以在焊接机器人技术与应用方面的教学资源十分匮乏[7]。大多数焊接教材面向非职业教育,内容也只是技术资料的整合,涉及面较为宽泛,针对性不强,特别是对理论要求高,实操要求少,不适用于职业技能教育。另外,很多教材技术内容与行业最新技术水平相比较为滞后,培训人员在进入企业后无法直接上岗操作,还需经过企业再次培训。因此,中国焊接协会同中国劳动社会保障出版社,依托协会在焊接产业领域的技术优势和技能人才培养经验,研究开发了与产业需求对接,与行业标准和企业实际融合,适用教学实践活动的职业技能教材。
2 焊接机器人培训教材主要内容
2.1 开发依据
本教材以《国家职业技能标准——焊工》(2018版)为依据,以“职业活动为导向、职业技能为核心”作为指导思想,对各等级的焊接机器人操作工的职业活动内容所涉及的技能和理论知识水平进行规范细致编写。
2.2 教学培训体系
本教材依据《国家职业技能标准——焊工》有关规定将焊工职业分为:初级工、中级工、高级工、技师和高级技师5个等级,根据职业等级、技能要求和相关知识要求依次递进。以弧焊机器人为例,初级工需掌握机器人示教盒的简单操作,对机器人机型简单控制操作,能够选择坐标系,根据工作需求移动机器人末端到达指定位置,并保持正确姿态。中级工则能运用各类指令编制机器人弧焊工作程序,能分析并进行单层单道平焊位置对接、搭接、角接焊缝的机器人弧焊示教编程。高级工则能够进行高级编程(运用变量进行编程),并能够完成复杂工艺的焊接(多层多道焊焊接示教编程)。
2.3 注重实例的培训内容
焊接机器人不仅是工业机器人和焊接系统的结合,也是从设计、工艺、流程等多个维度开展的焊接技术重构,技能要求更加注重实践。若将工业机器人尤其是“机器人学”的相关教材生搬硬套,则难以达到良好的焊接机器人培训效果,与社会需求也偏离。教材采用点面结合、理论联系实际的方法,通过机器人焊接实例深化学员对于技能要求的理解与应用。例如:以KUKA点焊机器人操作培训为例,伺服焊钳在点焊过程中有时需要进行工具零点标定,标定过程在教材中是通过逐步教学的方式进行的,如图1所示。操作实施步骤为:选择零点标定(在示教器中选择千分尺,开始伺服焊钳的零点标定)→移动机器人(将机器人移动至安全位置,保证伺服焊钳不会与周边物体发生碰撞)→外部轴(伺服焊钳)闭合(通过示教器对伺服焊钳进行闭合能够重新获取伺服焊钳零点位置)→外部轴校准调零(将当前位置保存为零点位置)。
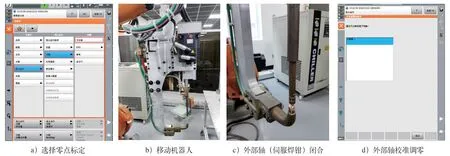
图1 零点标定过程
3 教材特色
3.1 实操性强
焊接机器人职业技能培训和教材不多,特别是存在实践性不足、实操性不强的问题。本教材从开发之初就着重围绕实践要求,务求与生产一线相结合,运用大量生产过程常见的焊接场景作为培训和鉴定内容,并对教学效果进行分析研究与探索。通过在操作实践应用中对项目开发、焊接工艺进行研究,经过各方努力,形成了丰富的操作实践教学资源,例如机器人通信配置、焊接参数经验总结、工厂生产实例、机器人操作经验实例素材等。同时在技师和高级技师环节,教材梳理了工艺开发流程、技术总结起草、教育培训等技能要求,都是一些技能人才日常用到的专业知识,有较强的交流、借鉴意义。图2为机器人点焊修磨器示教点位案例。
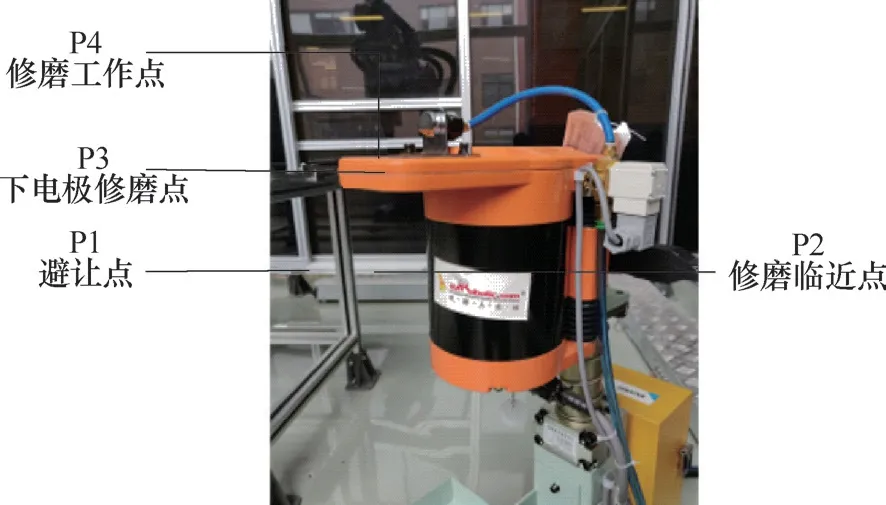
图2 修磨器示教点位
3.2 通用性强
教材选择不同生产厂家制造的焊接机器人、焊机,提取、分析了不同品牌焊接机器人与焊机的共性与个性问题,结合现场实际使用情况,提供多种机型焊接参数选择与讲解,见表1。立足于对教学资源进行全面、有效整合的基础上,结合生产实际使用情况与需求,有计划地选择最适宜的焊接机器人教材内容,保证可以在对焊接机器人课程体系内容学习基础上融合多款机器人现场生产实例以及仿真案例,尽可能地使教材适用于各类品牌焊接机器人与焊机。
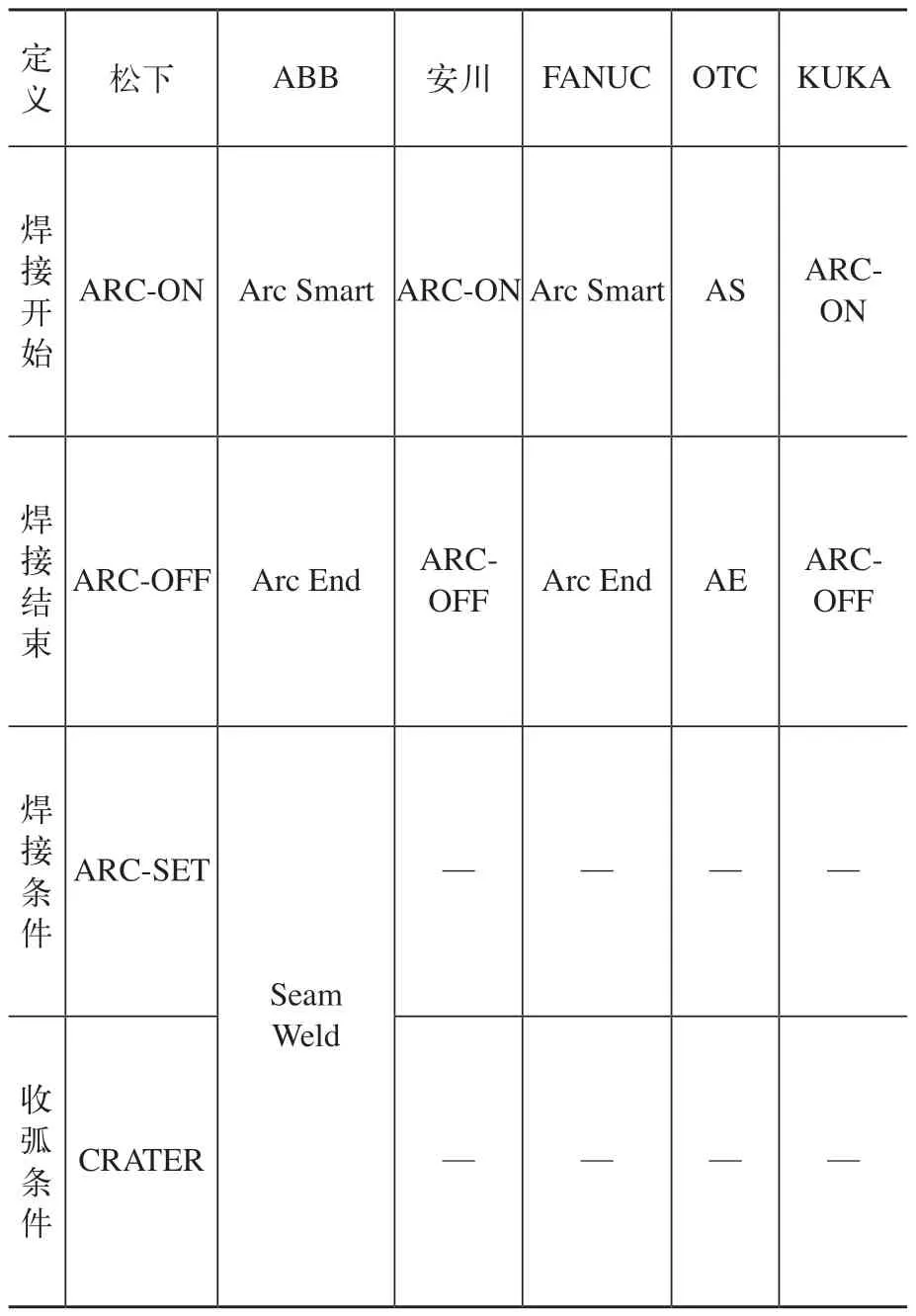
表1 机器人弧焊指令
3.3 应用性强
教学活动是由“教”与“学”构成的,机器人焊接实例是学习焊接机器人操作最直接的方法,是焊接机器人编程操作人员必须掌握的基本技能。本教材侧重于焊接机器人的应用,以机器人的现场操作案例、工艺软件编程和系统集成学习为主。此外,编者通过与ABB等机器人生产制造商、汽车生产公司等机器人系统使用的用户交流,确定相关知识与技能操作案例,编写出符合劳动力市场需求的实用教材,不仅使学生的专业能力和学习认知能力得到了提高,而且能够促进学生的就业与个人发展方向。
4 结束语
本文所介绍的焊接机器人职业技能培训鉴定教材具有很强的实践性、通用性、应用性,进一步完善和提升焊接机器人职业教育体系,明确《国家职业技能标准——焊工》职业技能标准体系中关于焊接机器人的教学内容,这对加快焊接机器人技能人才培养和考核工作有重要意义,为未来的焊接机器人教材开发奠定基础。同时,在本教材开发的基础上还研制焊接机器人培训配套的教具和工装6套,并申请5项发明专利,为焊接机器人职业技能培训提供了更为丰富的教学资源。
