斜沟煤矿运输胶带轨道巡检机器人系统的应用与研究
2021-03-01杜治宇
杜治宇
(山西西山晋兴能源有限责任公司,山西 兴县 033299)
随着斜沟煤矿井下原煤开采的延伸,井下原煤运输胶带数量也在逐渐增多,运输胶带具有数量多、距离长、落差大等特点。在煤矿运输胶带巡检工作上一直采用的是人工巡检。人工在查找运输过程中的问题隐患时,存在工作强度大、巡视点不能全部顾及、隐患发现不及时等问题,甚至某些小故障没有发现导致断带、跑偏等事故。通过引入机器人巡检系统代替人工,提高了巡检质量,有效避免了事故的发生。
1 斜沟煤矿运输胶带巡检机器人系统的构成
斜沟煤矿胶带巡检机器人系统主要由地面生产调度控制中心、工业环网、WIFI网络、轨道装置和巡检机器人等构成。其中机器人自身的控制系统由微电脑控制板、信息传输模块、对讲系统、温度传感器、甲烷传感器、拾音器、驱动电机和大容量锂电池等构成,见图1。
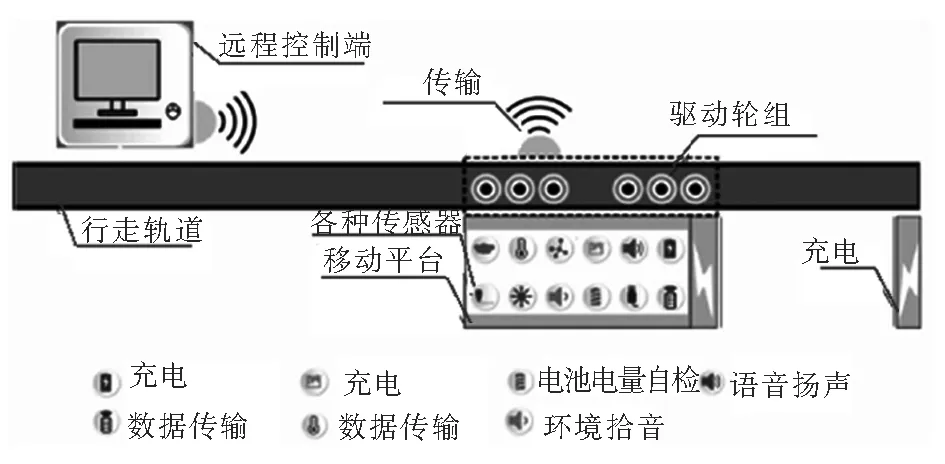
图1 斜沟煤矿运输胶带巡检机器人系统构成示意
在巡检机器人中单片机微电脑控制板是整个装置的核心,负责信息的收集、转化、传输,以及接收生产调度中心发来的遥控指令,驱动电机的运转。我们把大容量锂电池应用在轨道机器人的动力电源部分,其具有电荷量大、使用周期长的特点,能够使机器人最大运行距离达到600 m,运行时间不小于6 h(充满一次电量),使用锂电池提高了胶带采集机器人的灵活性,避免了敷设电源线的复杂化。此次斜沟煤矿胶带巡检机器人行走方式选用了挂式刚性轨道,整个行驶机构由工字钢轨道、电机、动力轮、支撑轮、轨道连接件等构成。其中动力电机选用了较大功率,确保巡检机器人爬坡角度大于16°,能够满足胶带运输巷道的大落差;巡检机器人本体总重量约为30 kg,锂电池容量为25 A,额定运行速度0.25 m/s,根据需要可以调整运行速度,音频频率响应:150 Hz~15 kHz(90dB声压、A加权),红外温度传感器识别范围-30~800 ℃,测量精度在±1.5 ℃之间,瓦斯传感器:(0~100)%LEL;分辨率0.1%LEL;矿用本安型摄像头像素300万,能够实现2.8~12 mm范围调焦,烟雾传感器检测浓度范围在(300~1 000)×10-6之间,烟雾传感器灵敏度Rs(in air)/Rs(1 000 ×10-6异丁烷)大于5[1]。
2 斜沟煤矿巡检机器人的实践应用
以斜沟煤矿1号、2号上仓胶带的巡检机器人为例进行探讨,上仓胶带输送机型号为DTL180/450/2-630,采用1 140 V变频器来启动胶带运转,上仓胶带运行带速5 m/s,1号胶带机长207 m,2号胶带机长233 m,该处胶带的坡度大、人员巡检困难,是主要运输胶带,一旦发生事故将直接影响矿井生产,因此上仓胶带的巡检工作优先采用机器人巡检。
2.1 斜沟煤矿胶带巡检机器人的网络结构
如图2所示,斜沟煤矿上仓胶带巡检机器人的网络传输主要采用了井下已建成的WIFI无线传输网络,巡检机器人通过各个传感器收集到的信号通过无线网络首先传送到WIFI基站,然后基站通过矿井的千兆工业环网将各个数据传输到调度中心。巡检机器人通过无线传输减少了数据线缆的敷设和维护,对于以后巡检机器人的升级改造,扩展应用都减少了线缆的重新敷设和人工劳动。同时为了保障机器人巡检网络的稳定运行,我们对整个巡检通信网络采用直流电源供电,确保在矿井停电的极端情况下能够不间断信号的传输,同时避免了交流电压波动对设备造成的危害。

图2 斜沟煤矿胶带巡检机器人网络拓扑图
2.2 胶带巡检机器人的现场应用
以上仓巡检机器人巡检内容为例,如图3所示,上仓胶带巡检机器人的工型钢轨道吊挂固定在胶带巷顶部。巡检机器人通过自身携带的甲烷传感器,红外测温仪,烟雾探测器,能够有效地采集运输胶带周围的瓦斯浓度、煤雾浓度,设备和环境温度,声频信息,然后通过无线网络将信息传回调度中心,通过运行分析软件进行大数据分析,一旦出现异常就会报警通知。同时巡检机器人载高清摄像头,可采集移动视频图像,解决了固定视频监测覆盖不全、有死角等问题,对于漏水、漏油等具体位置能准确上传。

图3 斜沟煤矿胶带巡检机器人现场安装示意
调度指挥中心通过机器人控制软件能够实时展示运输胶带的实况画面,通过画面选择可以看到运输胶带的温度信息、瓦斯气体含量以及机器人自身的电压、电流电量等信息,通过控制软件中的3D模拟显示巡检机器人在该运输胶带的位置信息。安装在机器人中的拾音器实时采集现场声音并上传,由控制中心进行自动分析,预判设备故障。需要分析现场环境时可以播放实时采集的胶带运转声音,确保没有异响,在声音分析上也可以选择自动分析,当声音频率在软件中出现异常波动时会发出告警信号,调度中心值班人员根据声音异常报警信号,迅速查看机器人的监控画面和收听现场采集实时声音,值班人员综合研判后再确定是否进行运输胶带故障停机处理。
巡检机器人采用锂电池供电,可实时监测自身电量状态并上传电池电量信息,当监测到电池电量低于设定下限值时,巡检机器人会自动停止巡检工作,返回就近充电站充电。斜沟煤矿的运输胶带巡检机器人具有自行主动工作巡检和人工手动操作功能。人工手动操作在电脑上进行,级别高于自动巡检。在人工手动运行模式下,可以操作机器人迅速运动,快速接近想要巡查的目标地;在自动工作方式时,胶带巡检机器人只会以相对适中的速度运动,在设定的巡检区间来回往复巡检[2]。矿用自动巡检机器人可主动查验故障功能,当胶带保护或其他设备发生故障时,调度中心计算机将故障信号传递给机器人,机器人将会到相应的位置,采集相关现场数据并上传。
3 巡检机器人现场运行效果分析
斜沟煤矿井下共有原煤运输胶带16部,胶带现场运输情况既有长距离6 300 m的北翼胶带,也有高落差300 m以上的盘区胶带,这些胶带每部都包含电动机、减速器、制动器、逆止器、托辊、滚筒、胶带、胶带架等各类零部件,零部件数量众多,仅靠人工巡查很难觉察到潜在问题。表1对机器人巡检方式和人工巡检方式进行了对比[3]。
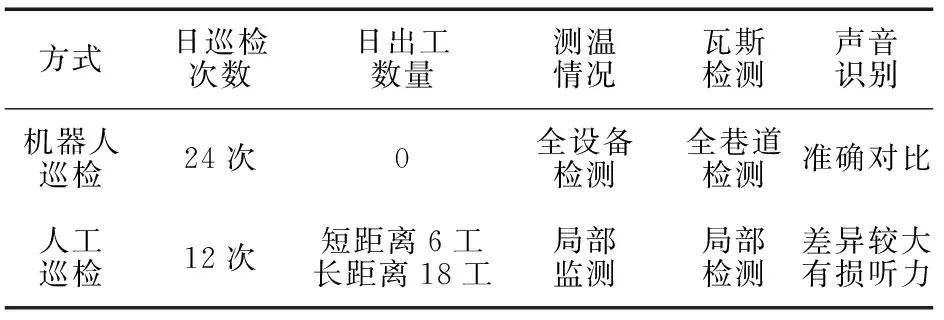
表1 单个运输胶带机器人巡检与人工巡检对照
以上仓胶带为例,在过去的巡检工作中,一直安排2名巡视工间隔2 h巡视1次,一天要巡检12次,人员劳动强度大,有时存在少巡视或不巡视现象;当巡视工责任心不强时,某些隐患不能提前发现,将可能导致机电事故;特别是高落差的胶带运输巷道,由于坡度大,胶带上的煤块经常滚落,给职工日常巡检带来很多安全隐患。在应用运输胶带巡检机器人系统之后,井下职工作业强度大幅下降,有效降低了工作风险,提高了安全系数。利用机器人的红外感器还能提前发现设备局部温度升高,做到了提前预知隐患、超前预防,防止了事故扩大化。通过使用运输胶带巡检机器人后,在巡检工作上可减少运输胶带专职巡检人员80人,达到减员提效的目的[4]。
4 结 语
斜沟煤矿井下运输胶带巡检机器人系统以智能轨道式巡检机器人为核心,配套高速无线网络实时传输信息、传感测控系统、数据分析系统以及相关附件,完全替代人工完成了井下运输胶带的巡检工作,通过该套巡检机器人系统的应用,原煤运输胶带实现了全天候24 h高质量、大范围的巡视、检查工作,在及时发现潜在事故隐患上效果明显,同时减少了该项工作上的人工投入,提高了矿井运输安全,对矿井安全生产和减人提效起到了良好的示范作用。