基于单片机对道路护栏全自动清理机器人系统的设计与应用
2021-03-01郝运佳孙佳豪
郝运佳 孙佳豪
一、研究背景
1.1 研究现状
随着城市环境要求的不断提高,马路上护栏的清理也被重视起来,相关管理规定一周清洗一次,遇旅游旺季和重大活动、节假日,护栏要随时保持清洁,不具备车洗条件的道路护栏,采取人工作业。而现在主要是两种清理方式,一种是人为清理,对清理人员的安全有很大的危险,而且在一些活动节假日更要保持护栏的清洁,所以更是加大了人为清理的安全隐患;二是通过护栏清洗车清理,在一些节假活动日,道路上的车流量加大,容易影响车辆的行驶,而且是相对于较窄的马路,容易造成车辆堵塞,并且浪费水资源,所以我们想通过一个护栏智能清理系统来解决这个问题。
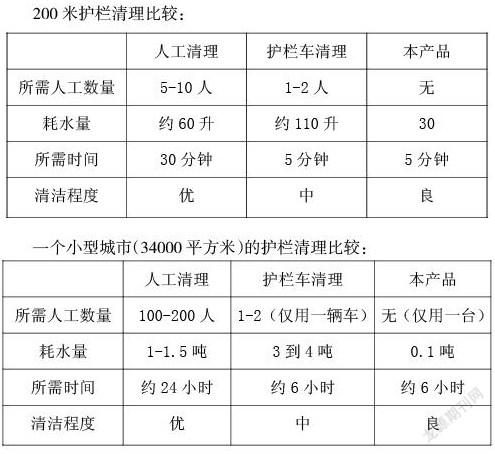
200米护栏清理比较:
一个小型城市(34000平方米)的护栏清理比较:
通过以上数据可以得出:
(1)本产品大大减少了人工清理和护栏车清理所需要的人数。
(2)减少了人工清理所需要的时间。
(3)相较于人工清理和护栏车清理的耗水量,本产品可以循环利用水,大大减少了水的消耗。
1.2 发展前景
在人工智能的时代,智能化的产品逐步运用于各种行业。新的智能产品不断问世,不仅方便了人们的生活,更加体现了一个国家的科技水平和综合国力。将智能与节能环保相结合,与未来社会发展的趋势完全相符,既促进了节能环保领域的发展还推进了智能产品的进程。智能护栏清洗装置,对一个城市的美化起到了不可预估的作用。
二、系统整体设计
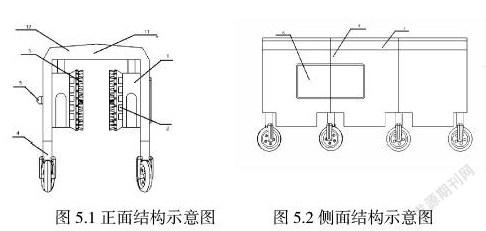
本设计基于STM32F103单片机芯片作为核心,采用柔性太阳能板为系统供电,PC阳光板用于外界隔热,挡雨。采用激光雷达系统,实现装置在护栏上的自动导航行驶。采用红外遥控装置,通过按键控制装置在道路上的各种转向行驶。利用68ktyz同步电机进行驱动。采用L298N电机驱动芯片驱动直流电机,并且运用PWM脉冲宽度调制技术对电机的转速进行控制。采用大型储水箱为护栏清理提供水源,高压喷水装置为清洗工作喷水。
2.1 设计思路:
该产品首先由激光雷达判断是否有护栏并将判断结果发送至单片机系统,当有护栏时位于机器靠前部位的高压喷水系统从储水箱中吸取水并将水喷至护栏上,由超声波模块检测护栏与清洁装置的距离并自动调距,由于护栏与清洁装置紧密接触,通过装置向前行走清洁装置对护栏进行挤压式的清洗。喷水装置所渗出的污水则沿着护栏及洗车棉与机器之间的铁板流至位于机器底部的污水接收装置,此装置中的污水通过小型水泵压至反复过滤装置中进行过滤,过滤完成后再将水放流至储水箱中从而实现水的重复利用。
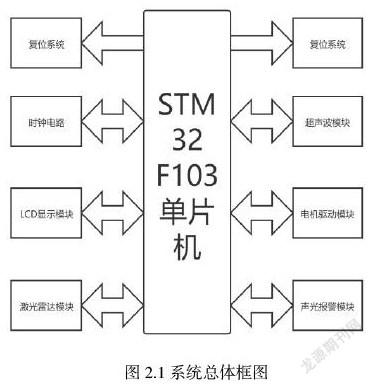
2.2 系统总体框图:
本产品的工作过程为:开启设备,激光雷达系统进行检测,护栏清洁设备不在护栏的尽头,然后超声波模块进行检测,将清洁装置向护栏延申,通过超声波模块反馈的数据,确定好清洁装置的位置,护栏清洁装置开始移动,同时喷水装置开始喷水,清洁装置,除水系统也开始运作,当激光雷达检测到到达护栏尽头时,停止运作,水量检测装置显示剩余水量,如果水量过低,触发水量警告装置。本实用新型操作简便,效率高。
三、系统硬件设施
3.1 激光雷达系统
本产品的激光雷达装置用于检测本产品与护栏尽头的距离,它是由激光测距系统和集光定位系统两部分组成,集光定位系统用于调整探头的方向。探头特点:探测距离远,抗干扰性强,不受昼夜光线影响。测量范围0.03-100米,测量精度±1mm,测量时间:0.3-3秒,通过串口接到STM32F103单片机上。提供电压:3.3V(2.8-3.2V)。
3.2 报警硬件电路设计
蜂鸣器用于声音报警,三极管8050的作用是将信号放大,以提高蜂鸣器的报警声音。发光二极管分为“红”,“黄”,“绿”三种颜色。当发光二极管的绿灯亮,蜂鸣器不发声;当发光二极管的黄灯亮,蜂鸣器持续发出“滴”声:当发光二极管的红灯亮,蜂鸣器持续发出“滴滴滴”声。
3.3 STM32F103单片机控制系统
STM32F103单片机控制系统使用高性能的ARMCortex-M332位的RISC内核,工作频率为72MHZ,内置高速存储器(高达128K字节的闪存和20K字节的SRAM)。该单片机系统是整个装置的核心控制模块。它用于接收水量,距离等信息。并通过安全距离和水量的计算公式,将具体做法方式传输到各个控制模块,从而达到整个装置的正常运行。
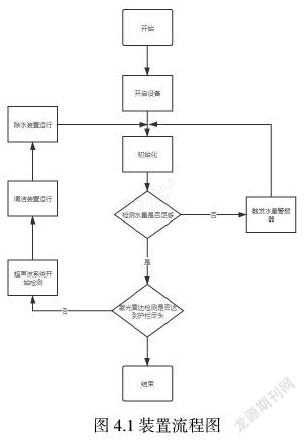
四、软件部分
程序的运行过程如下图所示:人工通过按下按钮开启设备后,系统先进行初始化,完成后進行水量的数据采集,当水量小于标准水量(V=abh/5--a,b分别为底面的长和宽,h为储水箱的高度),水量检测装置将现有水量返回至单片机,通过LCD显示模块,将现有水量和须加水量显示到显示屏中。同时蜂鸣器也发出“滴滴滴”的声音,提示水量不足,报警灯显示红色。若大于标准水量,激光雷达开始检测是否到达护栏尽头,并将检测距离返回至单片机,由单片机内的距离检测模块进行距离分析,若达到尽头则停止运行,并将信息显示到显示屏上。若没有检测到尽头,超声波系统开始对护栏与清洁装置的距离开始检测,并自动调整距离,距离调试完成后启动清洁装置,除水装置。装置开始正常行驶。
