三相四桥臂逆变器的空间矢量调制研究
2021-02-28东莞理工学院电子工程与智能化学院孔祖荫王泺涵陈光乐梁世武
东莞理工学院电子工程与智能化学院 孔祖荫 张 志 王泺涵 陈光乐 梁世武
东莞矩华超声技术有限公司 谭开国
三相四桥臂逆变器在不平衡负载下能够输出三相对称电压,具有控制简单,电压利用率高,体积小重量轻等优点。三相四桥臂逆变器被运用在有源滤波器、UPS上解决不平衡负载的问题。本文主要介绍三相四桥臂的主电路,并介绍三维空间矢量调制技术在四桥臂逆变器上的运用。并通过仿真实验验证在不对称负载情况下的可行性。
1 三相四桥臂逆变器硬件电路设计
传统的三相三桥臂逆变器若工作在不平衡负载的情况下,传统的逆变器无法保证三相输出是对称的,三相负载不对称,使得三相电流不对称,即流入节点的电流不为零,由于没有中线为不平衡电流提供回路,使得三相电压不平衡。故在传统的三相三桥臂逆变器上增加第四个桥臂来控制中性点电流,使其能在不平衡负载下输出三相对称电压。三相四桥臂逆变器主拓扑如图1所示。

图1 三相四桥臂逆变器主拓扑
2 基于abc坐标下的3D-SVPWM调制
由于四桥臂逆变器多了一个桥臂,三桥臂逆变器所使用的二维空间矢量调制已不再适用。3D-SVPWM是二维空间矢量的延伸。在abc坐标系下不需要进行坐标转换,减少了计算量。空间矢量调制不用像SPWM一样对每个桥臂的调制信号单独计算,调制波由算法生成,易于数字化实现。
2.1 三维空间矢量开关状态
四桥臂逆变器每个桥臂有2种开关状态,共有24=16种开关状态。同一个桥臂的开关管不用同时导通,在实际应用中也会加上死区时间防止同桥臂开关管同时导通。对桥臂上两个开关管的开关状态定(表1)义如下:
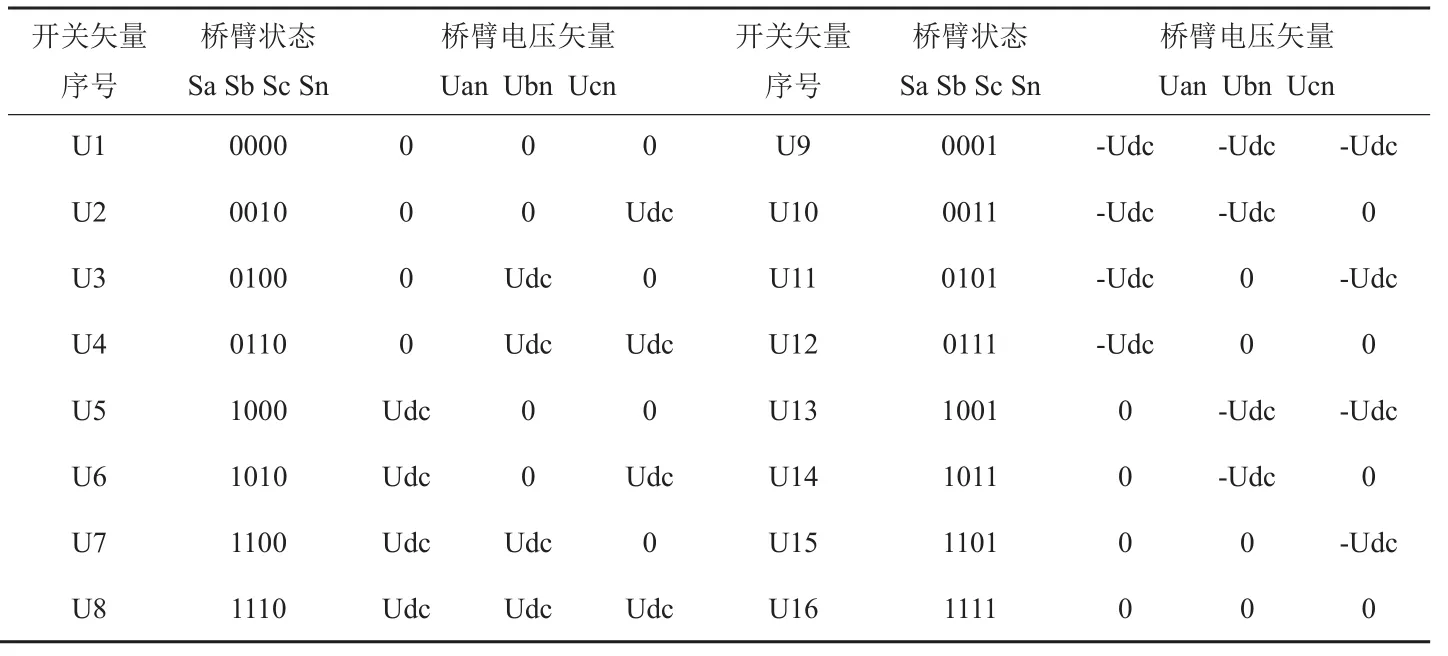
表1 开关状态表
这16种开关状态构成如图2所示的12面体。
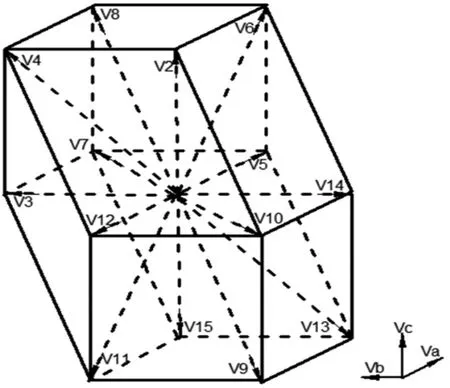
图2 abc坐标系下的12面体
2.2 电压矢量占空比计算
为方便判断电压矢量所在的空间区域,设k1-k6六个参数,并定义指针函数rp来选择相应的四面体。

由式(2)可知,rp有24种状态,即有24个相应的空间四面体,每个四面体由3个非零矢量和2个零矢量组成。三个非零开关矢量相应占空比计算如下:

d1,d2,d3表示开关矢量相对应的占空比,Udna,Udnb,Udnc表示第n个非零开关矢量在abc坐标下的投影。
例如对rp=5进行计算电压矢量相对应的占空比:可知是由U2,U10,U12开关矢量组成的四面体,其相应占空比计算:

2.3 开关矢量选择顺序
开关电压矢量作用顺序主要有两种:单零矢量开关顺序(7段式)和双零矢量开关顺序(9段式),本文主要使用双零矢量开关顺序,此类方法有开关次数多,开关损耗大,但输出波形脉动小,THD较小等特点。例如当rp=5时,相对应的四个桥臂开关切换顺序如图3所示。
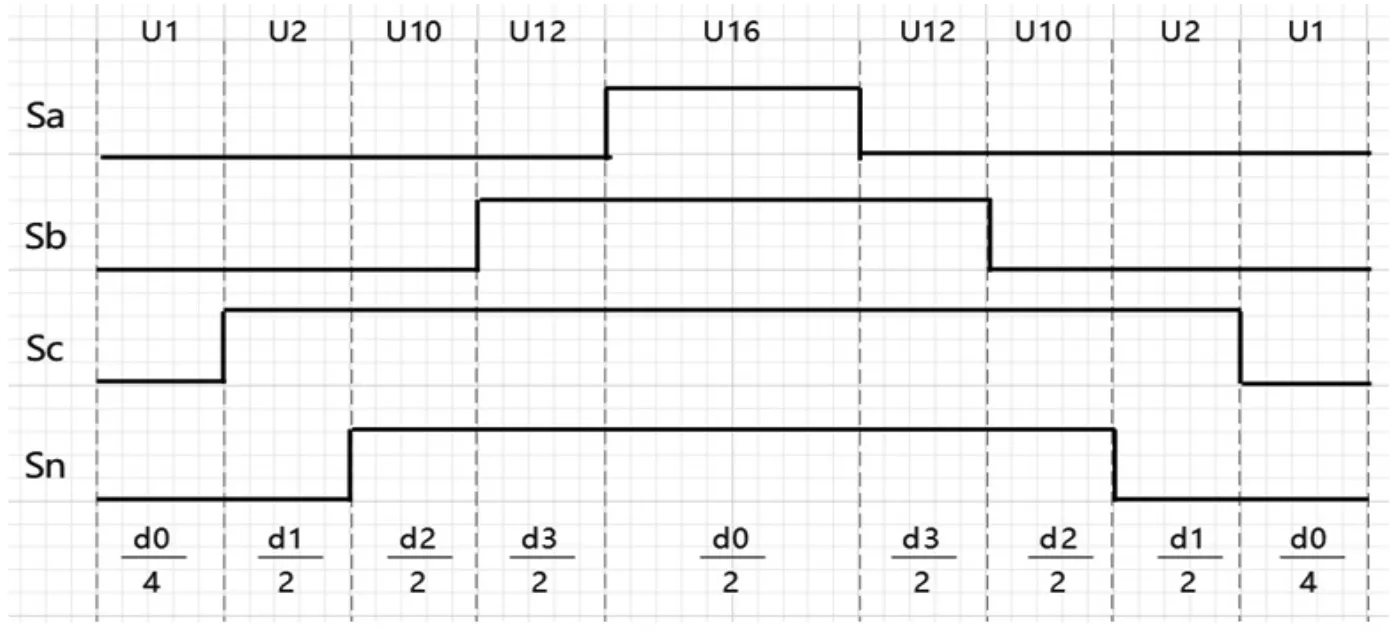
图3 rp=5时开关矢量顺序
2.4 开关矢量作用时间计算
例如rp=5时,四个桥臂开关作用时间:设Ts为开关周期,T0,T1,T2,T3分别为零矢量与三个非零矢量的作用时间。则则四桥臂对应时间Ta,Tb,Tc,Tn为:

3 实验结果分析
图4、图5所示的三相负载分别为80Ω,40Ω,20Ω,实验结果证明,在不平衡负载下,电压波形对称,三相电流相互独立,能够很好地解决不平衡负载下中性点漂移的问题。
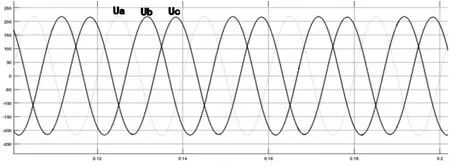
图4 不对称负载下三相电压
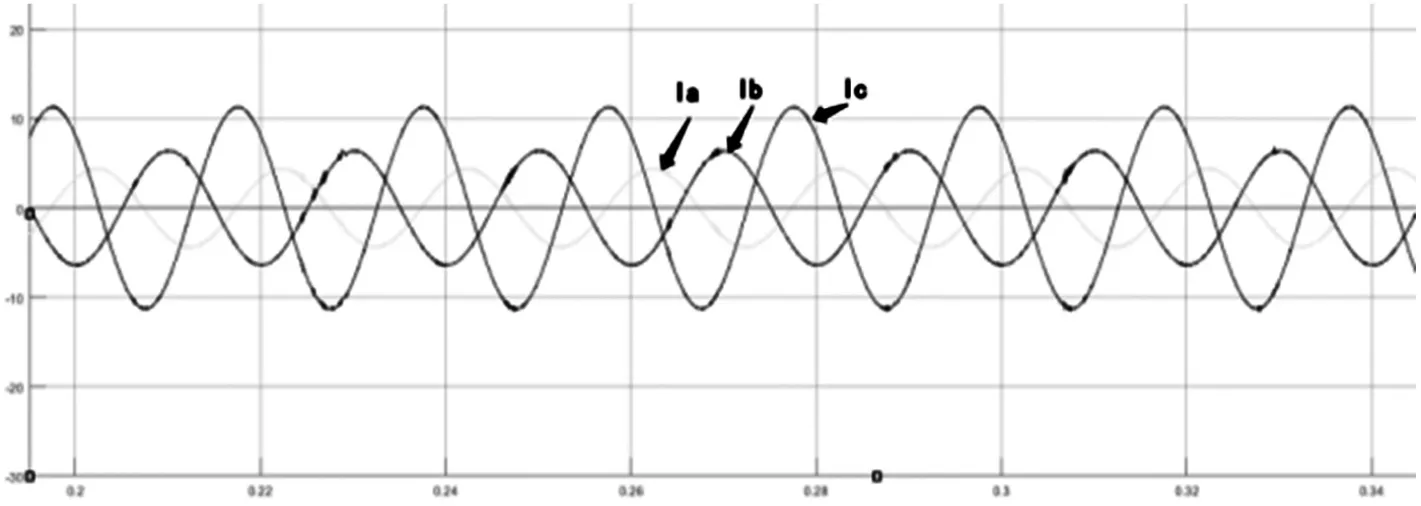
图5 不对称负载下三相电流
本文课题是基于三维空间矢量调制三相四桥臂逆变器的研制。分析了三相四桥臂的特点及应用;介绍了三维空间矢量调制技术,并通过仿真验证实验结果,实验结果证明三相四桥臂逆变器能够承载不平衡负载,且使用3D-SVPWM调制方法能够提高母线电压利用率。
