基于迟滞观测器的压电堆补偿控制
2021-02-26胡佳明朱晓锦方昱斌高志远苗中华
胡佳明, 朱晓锦, 方昱斌, 高志远, 苗中华
(上海大学 机电工程与自动化学院,上海 200072)
由于压电作动器具有结构刚度高,响应速度快等特点被广泛应用于能量收集[1]、振动抑制[2]、精密系统控制等[3]场合。但压电材料本身包含的迟滞效应常常限制了压电作动器的控制精度[4],例如在高精度的控制台中,迟滞效应可带来高达10%~15%的控制误差[5]。
迟滞效应为一种带有局部记忆特性的非线性环节。为了描述迟滞效应,学者们提出了众多的压电堆数学模型,这其中就包括了Bouc-Wen模型[6-8]。由于Bouc-Wen易于进行迟滞补偿因此被广泛应用于工程领域[9]。例如:文献[10]探讨了针对Bouc-Wen模型的前馈加PI反馈补偿控制。文献[11]结合逆Bouc-Wen模型和PID控制实现了压电堆APA120S的跟踪控制。文献[12]研究了多自由度压电堆扫描平台的控制,其中采用了多维的逆Bouc-Wen模型。
然而,Bouc-Wen模型中的不确定因素使得逆迟滞模型在工程实践中受到限制。为了解决这一问题,基于迟滞观测器的补偿系统设计成为压电控制领域一大热点问题。文献[13]将迟滞现象视为有界扰动,设计了扰动观测器;文献[14]提出了一种卡尔曼滤波观测器;类Luenberger观测器研究可见文献[15-17]。
对于压电控制器的设计问题,前馈控制器和反馈控制器都有学者进行了研究。文献[18]采用了一种自适应滑模控制器;Li等设计了PID滑模控制器,并应用在多维操作平台中;Royson等则采用了PID控制。文献[19]使用了多通道FULMS算法对压电机敏柔性梁进行了主动振动控制。文献[20]研究了非对称Bouc-Wen模型的辨识与前馈补偿;文献[21]通过运用高增益观测器克服了压电材料中的迟滞特性,并提出了一种基于神经网络的自适应控制器。
为提升跟踪控制精度,本文建立了一套基于迟滞补偿的压电堆自适应控制系统。其中包括了一个类Luenberger观测器和反步滑模控制器。新观测器的设计基于滑模控制理论和线性矩阵不等式(linear matrix inequality,LMI)技术设计,相比于上述已有的研究,新设计的观测器鲁棒性更强。具体表现在:通过矩阵不等式缩放的方式消除掉了模型中不确定因素带来的影响;基于H∞引理保证了迟滞观测器在系统受到外界扰动时的鲁棒性。其次,考虑到观测器在迟滞补偿过程中的误差,本文设计了一种基于反步滑模控制理论的跟踪控制器,新设计的控制器可以有效提升压电堆的控制精度,具有一定的鲁棒性。最后,通过实验验证了所设计控制系统的控制性能。
1 引言压电堆模型
当在压电陶瓷的表面施加电压时,由于电场的作用,会造成压电元件内部正负电荷中心的相对位移,从而导致压电元件产生形变。利用这一现象,工程中常利用压电陶瓷制成作动装置。然而由于压电陶瓷的极限应变很小,如果要获得较大的形变,常采用多片压电陶瓷制成堆叠形式,即压电堆。
Bouc-Wen模型是由Bouc提出并由Wen改进的一种用于描述压电堆特性的数学模型,它的数学模型可以被表达为

(1)
式中:x(t)为压电堆的输出位移;h(t)为压电材料带来的迟滞输出;m为压电堆的质量,kg;b为阻尼系数,N·s/m;k为刚度,N/m;d为压电系数,m/V;u(t)为压输入到压电堆的电压;α,β和γ为描述迟滞环的形状;η(t)∈L2[0,T)为外界扰动;为了方便分析,式(1)可以被重写为
(2a)
v(t)=H[u(t)]=du(t)-h(t)
(2b)

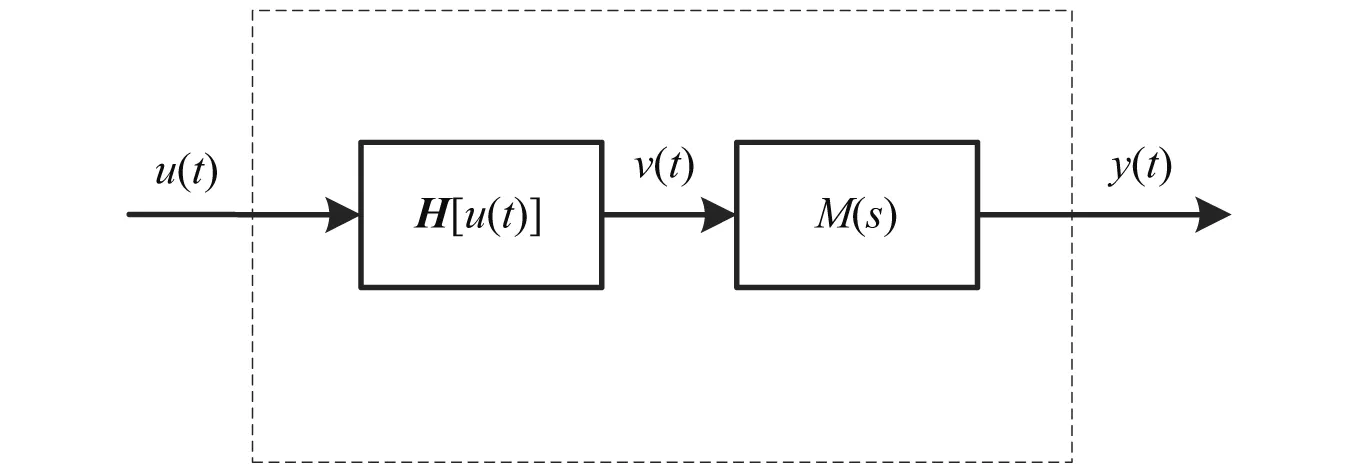
图1 Bouc-Wen模型的结构Fig.1 The constitution of Bouc-Wen model
图中,M(s)为由式(2a)描述的二阶线性系统。为了避免歧义,至此定义y(t)=x1(t)为压电堆的输出。
2 迟滞观测器设计
由图1可知,压电堆作动器可以表示为一个迟滞环节串联一个二阶线性系统。为了对迟滞现象进行补偿,本文基于滑模控制理论以及H∞引理设计一个类Luenberger迟滞观测器。基于观测器的迟滞补偿系统框架如图2所示。
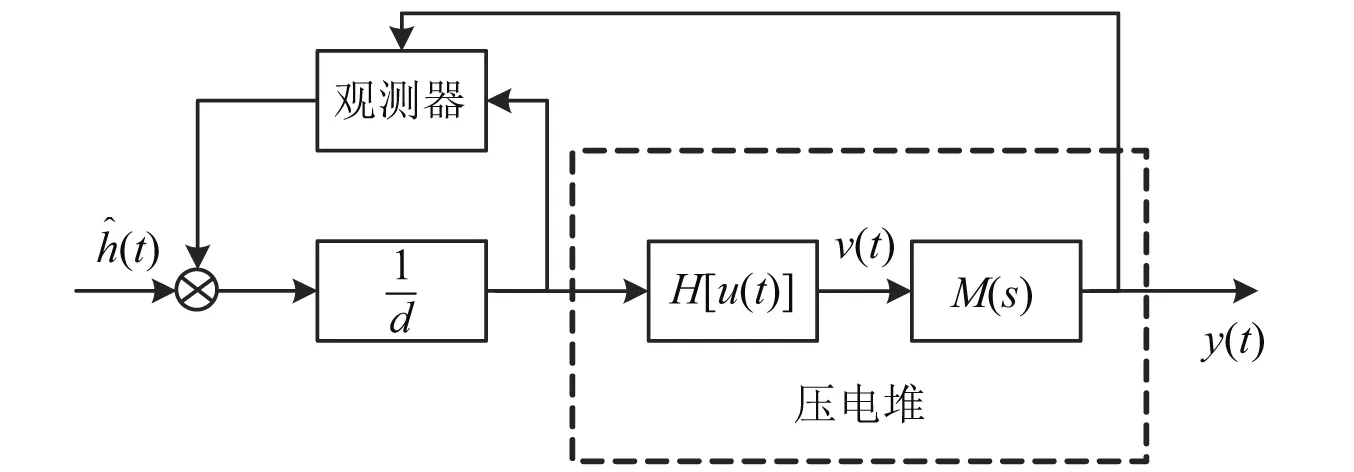
图2 基于观测器的补偿系统框架图Fig.2 The framework of the observer-compensation system
为了便于分析和设计迟滞观测器,压电堆模型式(2)可以被改写为
(3)

本文所设计的迟滞观测器表达式为
(4)
引理1[22]对于任意矩阵M∈Rb×c,W∈Rb×c,Z∈Ra×c, 若rank(M)=c,且满足矩阵方程
MW=Z
则可得M的通解为
M=ZW++U[Ib-WW+]
式中:U为给定的维数适当的任意矩阵;W+为矩阵W的广义逆矩阵。

(5)
则根据引理1,观测器中参数矩阵T,N的通解可以被表示为
式中,S为维数适当且可给定的矩阵参数。

(6)
根据表达式(4)、式(6)可以得到eo(t)的动态方程为
(7)

式中,P和Qd为正定且对称的矩阵。
引理2对任意维数适当的矩阵X,Y有
XTY+YTX≤ϖ-1XTNX+ϖYTN-1Y
式中:N为对称且正定矩阵;ϖ为正常数。
定理1对于迟滞观测器式(4),若存在正常数λ,ε;对称且正定矩阵Po,Qo满足
(8)
则观测器式(4)可以渐进地观测出压电堆的迟滞输出。
证明考虑如下的Lyapunov函数
(9)
对式(9)两端求导可得
(10)
根据引理2可得
(11)
则根据式(8)可以得到
(12)
显然有
(13)

注1定理1中的式(8)可以被改写为线性矩阵不等式形式。定义矩阵转换J=PoL,则式(8)可被重写为
(14)

3 反步控制器设计
为实现压电堆的跟踪控制,本文通过运用反步滑模控制理论,设计了一个基于迟滞补偿系统的鲁棒控制器。具体的控制框图如图3所示。
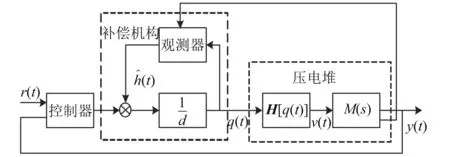
图3 压电堆控制系统结构框图Fig.3 The framework of piezoelectric stack control system
图中q(t)为迟滞补偿机构的输出。对照图3,压电堆中迟滞环节的输出可表示为v(t)=dq(t)-h(t)。待设计的控制器输出为u(t),补偿机构的设计目的为通过串联抵消迟滞环节H[·]的影响,使得v(t)跟踪u(t)。由此,控制器的控制输出可到达二阶线性系统M(s)。根据式(2a),此时有
(15)
定理2如果存在反步滑模控制器如下,则系统(15)可跟随参考信号r(t)
(16)

证明考虑如下的Lyapunov函数
(17)
对式(17)两端求导可得
(18)
根据虚拟控制输入的定义可以得到
(19)
因此有
(20)
定义Lyapunov函数
(21)
对式(21)两端求导可得
(22)
将式(16)代入式(22)可得到
(23)
定义
(24)
可得到
(25)
4 仿真及实验验证
首先将进行仿真验证,压电堆的参数如表1所示。
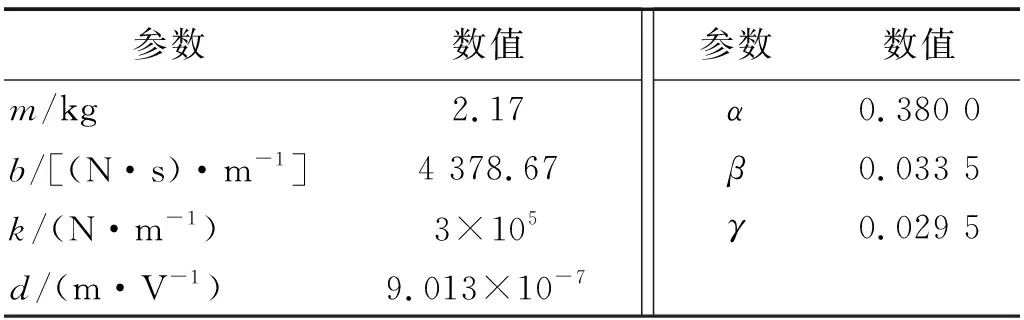
表1 压电堆参数(1)Tab.1 Parameters of piezoelectric stack(1)
设外部扰动为η(t)=0.5sin(30t) μm,参考输入r(t)=sin(3.14t) μm。
根据注1,通过求解得到系数矩阵T和N分别为
基于定理1,通过求解线性矩阵不等式(14)得到观测器中的参数矩阵

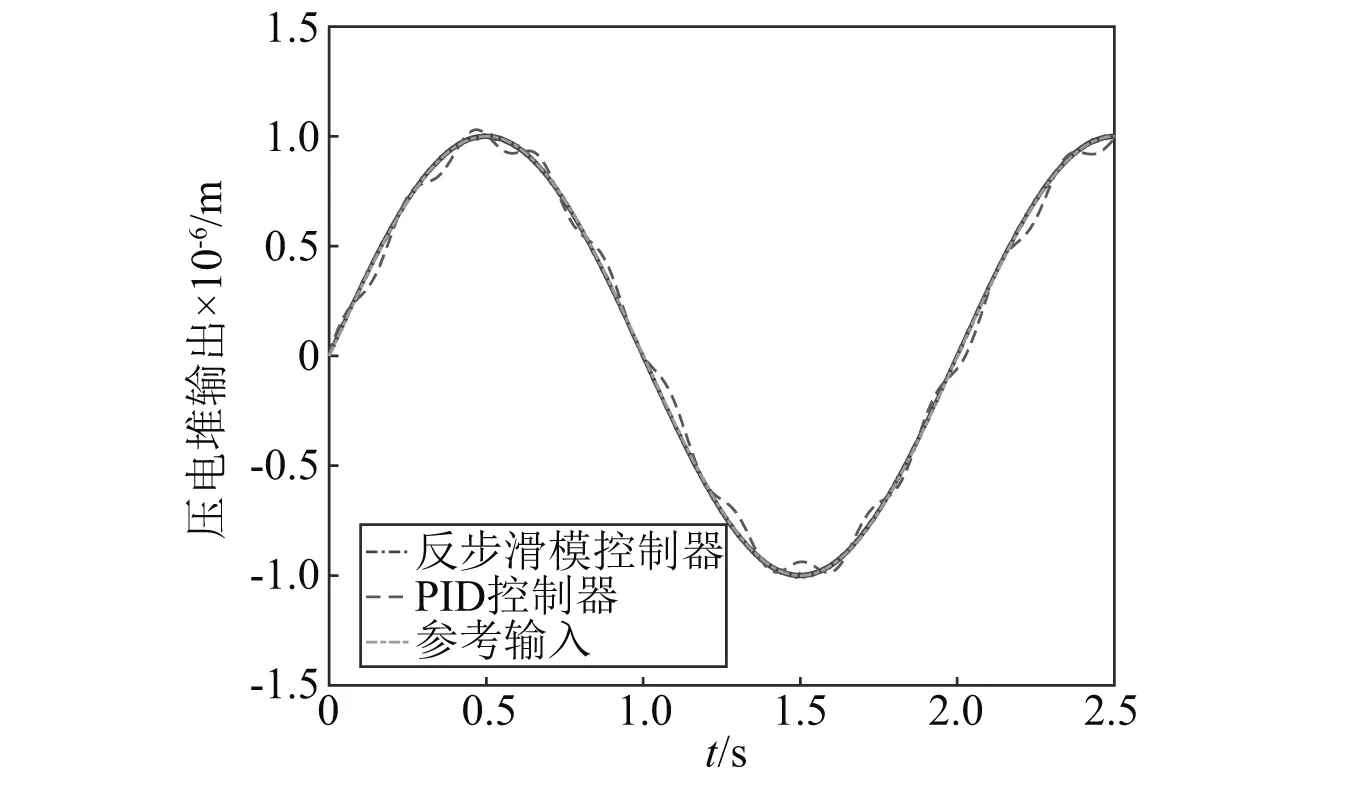
图4 压电堆控制效果(仿真)Fig.4 Control performance of the piezoelectric stack (simulation)
其中PID控制器的参数设定为P=10,I=5,D=0。由图4可知,所设计的基于迟滞补偿的反步滑模控制器具有更好的鲁棒性,跟踪误差较小。
下面进行实验验证。实验基于MATLAB中的xPC实时系统和实际控制平台,其原理图如图5所示。
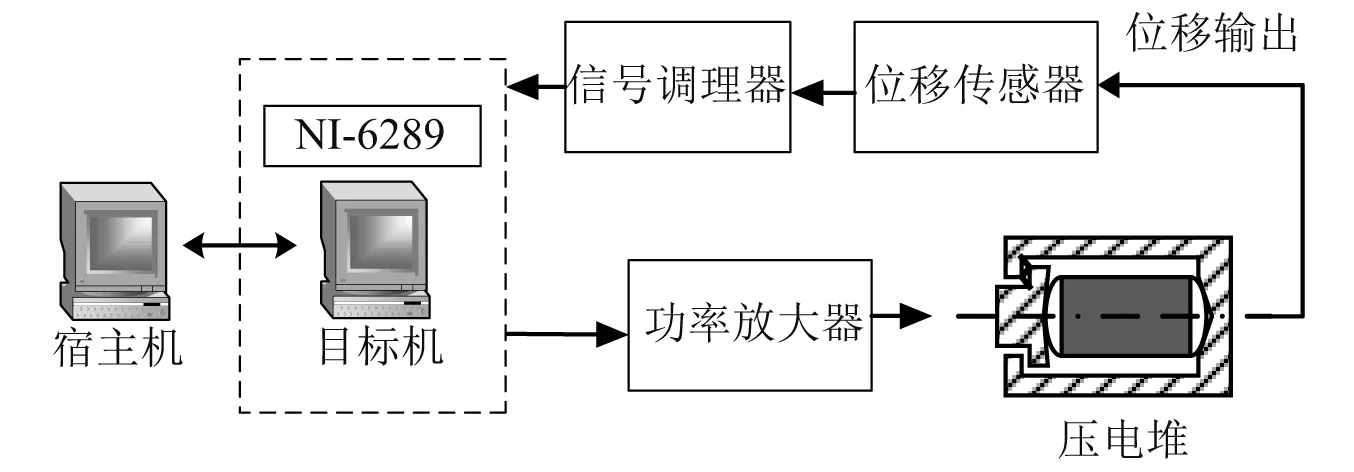
图5 压电堆控制系统Fig.5 Schematic diagram of the piezoelectric stack control system
其中,信号采集卡采用NI公司的PCI-6289,位移传感器采用E509.C1, XMT©,信号调理器E09.C1, XMT©,压电堆型号为PSt 150/7/7/20。系统的实物图如图6所示。

图6 实验平台实物图Fig.6 Piezoelectric stack control system
采用遗传算法对压电堆进行参数辨识[24],辨识结果如表2所示。
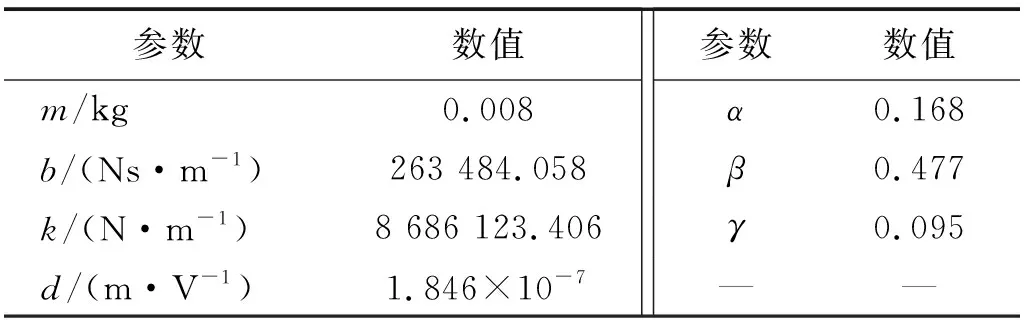
表2 压电堆参数(2)Tab.2 Parameters of piezoelectric stack(2)
指定参考信号r(t)=3sin(10πt)+3 μm。对于观测器式(4),通过求解得到系数矩阵T和N分别为
基于定理1,通过求解线性矩阵不等式(14)得到观测器中的参数矩阵


图7 压电堆控制效果(实验)Fig.7 Control performance of the piezoelectric stack (experiment)
如图7所示,压电堆输出在0.4 s左右稳定并跟踪参考输入,且控制效果良好。
5 结 论
由于压电堆具有响应速度快、能量密度高等特点,被广泛应用于各种精密控制平台的作动器件,但压电材料自身带有的迟滞特性严重影响了压电作动器控制精度。为了补偿迟滞效应带来的负面影响,提升压电堆的控制效果,本文首先基于滑模控制理论以及LMI技术设计了一个类Luenberger迟滞观测器。观测器在设计过程中考虑到了模型中的不确定因素以及外界扰动的影响,并通过Lyapunov定理证明了其具有H∞性能;其次,基于反步滑模控制理论设计了一个基于迟滞补偿的跟踪控制器,设计过程中考虑到了观测器的补偿误差,具有一定的鲁棒性;最后通过仿真和实验验证了所提出的压电堆补偿控制方法的有效性。
