基于涡旋电磁波的物联网大容量上行传输方法
2021-02-26王弢琚诚
王弢 琚诚










【摘要】 随着集成电路、无线通信等技术的进步,物联网技术飞速发展,极大提升了各行各业的效率。然而,物联网技术的不断普及导致传感器节点数量大幅增长,需要上传至基站的数据量也急剧增加,急需大容量无线通信上行传输方法。携带轨道角动量(OAM)的涡旋电磁波因其提供了一种全新的模态自由度而被广泛研究,OAM理论上无穷多的正交模态可以无限提升无线通信频谱效率。2007年,B.Thide提出给均匀圆周阵列(UCA)馈以等幅等相差的信号可以生成OAM。基于物联网传感器分布式的特点和UCA可用于OAM通信的特点,本文提出了基于涡旋电磁波的物联网大容量上行传输方法。通过在随机分布的传感器节点区域选取近似UCA的节点,之后采用近似UCA的传感器节点与基站进行基于OAM的大容量通信可以极大地提升传感器节点数据上传速率。仿真结果表明,采用近似UCA的分布式节点生成的携OAM的电磁波仍能保证一定的涡旋特性和模态隔离度。在本文的仿真配置下,仅6模复用便可达到22bps/Hz的频谱效率。本文所设计的基于涡旋电磁波的物联网大容量上行传输方法无需额外的硬件配置,仅利用现有节点通过算法实现OAM传输,传输效率高,系统开销小,非常适用于物联网节点与基站之间的短时高速上行传输。
【关键词】 物联网 均匀圆周阵列 轨道角动量 上行通信 频谱效率
引言:
近年来,随着集成电路、无线通信等技术的进步,物联网技术飞速發展,已经应用于经济生活中的各行各业[1]。典型地,国家电网于2019年提出建设泛在电力物联网的构想,将物联网技术应用于电力系统的发、输、变、配、用等各个环节。
传统的互联网业务,数据流量主要以下行为主,上行数据主要是一些信令信息,数据量小。因此,传统网络在设计时,一般下行容量远大于上行容量。而在物联网系统中,数据流向发生了变化。不同于传统互联网终端主要从基站获取数据,物联网终端(主要是传感器节点)则需要将采集到的数据上传至基站,从而接入核心网。这种数据流向的转变,随着物联网技术的不断普及,也对无线通信技术提出了新的挑战,即:传感器节点数量的快速增长造成上行数据量急剧增大,需要高速率的无线通信上行传输方案才能保障物联网系统的平稳运行。
然而,随着各类无线通信技术的发展,可用频谱资源越来越少,能用于特定无线传输技术的带宽非常有限[3]。当前的物联网上行技术方案,一般偏向于窄带应用,如LoRa,NBIOT等等,无法适用于未来海量数据的上行传输[4-5]。为了解决无线通信上行容量限制问题,华为联合中国电信提出了5G超级上行技术[6]。在数据上行阶段,提出将TDD和FDD结合,以提升上行数据率,采用超级上行技术,上行速率峰值可以达到343Mbps。然而,这种技术需要终端具备强大的数据处理和无线通信能力,即各个终端需要复杂的硬件配置,系统开销大,不适用于物联网中大量传感器节点的数据传输,这类传感器节点由于成本限制,一般只具备基础的数据处理与通信能力。因此,针对于物联网传感器节点海量数据的上传问题,需要简单高效的解决方案。
近年来,轨道角动量(OAM)因其独立于时间和频率的模态自由度而被广泛研究[7]。携带OAM的电磁波是一种涡旋电磁波,OAM理论上无穷多的模态自由度可以无限提升频谱效率,是大容量无线通信的一种很有前景的传输方案。2007年,B.Thide等人首次提出均匀圆周阵列(UCA)可以在微波频段生成OAM[8]。自此,研究人员对基于UCA的OAM通信进行了大量研究。2018年,日本NTT公司采用多圈UCA首次进行了10m距离100Gbps速率的OAM复用通信试验[9]。2019年文献[10]系统地研究了未对准UCA对OAM通信性能的影响,并提出了一种联合波束成型及预编码方案,可以显著提高频谱效率。清华大学研究人员研究了采用部分圆周接收OAM电磁波的正交性问题[11]。文献[12,13]提出了一种混合正交模分复用方案,它将正交模分复用和传统的正交频分复用相结合,以提高无线通信性能。
上述的基于UCA的OAM研究都假设是集中式的收发机,即UCA处于一个终端节点上。集中式的收发机结构复杂,对终端节点数据处理和通信能力要求高。已有研究表明,基于UCA的OAM通信信道容量受UCA的尺寸和通信距离的影响[14]。当通信距离远大于UCA的半径时,由于OAM波束的发散问题,接收UCA无法分辨出多个OAM模态,从而限制了频谱效率的提升。文献[14]给出方案,即提升发射UCA的半径可以使得波束汇聚,从而获得信道容量的提升。一般情况下,集中式的收发机无法制作大口径的UCA。从提高UCA的口径出发,考虑到物联网传感器分布式的特点,可以构造出一个分布式的大口径发射UCA,即传感器节点作为UCA的一个阵元,组成UCA的传感器节点协同以OAM通信方法向基站发送数据。这种情况下,由于分布式UCA的半径比较大,减小了OAM波束的发散问题,基站上的UCA便仍然可以分辨多个OAM模态,使频谱效率获得极大提升。基于上述思路,本文提出了基于涡旋电磁波的物联网大容量上行传输方法。本文的方法无需额外的硬件布线和参考节点,选取已有的节点组成近似UCA,采用基于UCA的OAM通信方法将数据上传至基站。过程简单,通信容量大,一定程度上缓解了物联网节点大容量上行传输问题。
一、场景模型
在某些物联网试验区,由于所处地理位置的限制,试验区内的传感器节点可能无法布置有线网络接入核心网,布置地面基站也同样难以实施。此时,常用的方法便是采取无人机空中基站[15]。为了阐述物联网传感器节点对短时大容量高速上传的需求,考虑如图1所示的物联网传感器节点与空中基站通信的场景(图中的黑色圆点即为传感器节点,飞机即为空中无人机基站)。
如图所示,大量的感器节点分布在一个指定的平面矩形区域(试验区)内。根据需要采集数据的具体位置不同,节点之间一般间隔一段距离放置,整体的节点分布是随机的,没有呈现某种固定的几何结构。无人机定时飞往待采集数据的传感器区域上空通知传感器节点,传感器节点接收消息后开始将采集的数据上传至空中无人机基站。由于传感器数量庞大,采集到的数据量也非常大,此时便需要大容量的无线上行传输方法,能够在更短的时间内将所有传感器在一段时间内采集到的数据上传至空中基站。
二、基于涡旋电磁波的物联网大容量上行传输方法
针对于图1的应用场景,本文提出了基于涡旋電磁波的物联网大容量上行传输方法。本文所设计的方法主要内容包括:在随机位置的传感器节点区域中选取出一组近似UCA分布的节点的算法、利用这组近似UCA分布的传感器节点与空中基站进行OAM大容量通信的方法。以下分别进行阐述。
2.1从传感器节点区域内选择出一组近似UCA分布的节点的方法
在实际的场景中,根据传感器数据采集的具体位置不同,一般是隔一段距离放置一个传感器,例如,平均间隔2米左右放置一个传感器用于采集数据。由于数据采集区域是有限的,本文假设所有随机分布的传感器节点都在某个指定的矩形区域内。一般情况下,每个传感器节点都有一个编号(编号存于各个传感器的存储器内),为了方便表述,这里假设传感器编号为n,n=0...N-1。为了清晰表述本文在节点区域内选择近似UCA节点的方法,此处将图1的立体区域节点图表示为图2的平面区域节点图,后续的算法说明均参照此图。说明中用到的变量定义均已标注于图中(注意,在本文的说明中,相同字母,不同格式下标的变量代表示不同的含义,如:(xn,yn)代表n号节点的直角坐标;而(xk,m,yk,m)代表第(k,m)个环块中心的直角坐标)。
如图2所示,以矩形(图中为正方形)区域的中心为坐标原点,同时作直角坐标系和极坐标系,对于编号为n的节点,其直角坐标为(xn,yn)(-xlim
xn=rncos(φn) (1)
yn=rncos(φn) (2)
为了避免名词混淆,这里对后续说明中用到的概念进行具体定义。
圆周:以坐标原点为中心,以一定长度为半径所作的圆。
圆环:相邻两个圆周之间包含的部分。
扇区:以坐标原点为起点,作两条不同角度的射线,两条射线中间的部分定义为扇区。
环块:上述一个圆环和一个扇区相交的部分即为一个环块。
环块的极坐标中心点:一个环块的边线由四条线相交构成:两个相邻的圆周线和两个相邻的从原点出发的射线。假设组成环块边线的两个射线的角度为θm ,θm +1,两个圆周的半径为Rk ,Rk+1,则定义环块的极坐标中心点为
(3)
UCA参考点:一组能构成标准UCA的参考节点。本文选取近似UCA的节点时,以与UCA参考点距离最小为标准。某一组UCA参考点即上述某一个圆环包含的各个环块的极坐标中心点。
参考上述定义,本文从节点区域内选取出一组近似UCA分布的节点的方法是一种遍历搜索法,总体思路为:以坐标原点为圆心,画若干个等半径差的圆周,将原始节点区域划分为若干个宽度(构成圆环的两个圆周的半径差值的绝对值)相等的圆环区域。接着,以原点为起点,作若干等角度差的射线将上述圆环均匀分成若干个环块(相同圆环被切分成的环块完全相同)。每个圆环所包含的各个环块的极坐标中心点即为该圆环所对应的UCA参考点。最后,选择出每个环块中离各自UCA参考点距离最近的节点,即为该圆环所对应的近似UCA的节点。下面逐项说明上述方案中各个环节所用到的具体方法。
2.1.1将平面节点区域分成多个环块区域的方法
由于要选取的近似UCA的节点所对应的圆周不可能无限小或者无限大,因此,在搜索时需要给定一个最小圆周半径rmin,和最大圆周半径(取为前述的rmax)。此外,根据矩形区域内节点的密集程度(节点之间平均间距的大小)确定相邻圆周之间半径间隔Δr。据此可以确定搜索圆环的个数为
(4)
以rmin为最小圆周半径,rmax为最大圆周半径,Δr为半径间隔,做K+1个圆周,圆周按半径从小到大编号为k=0...K。第k个圆周和第k+1个圆周之间的圆环编号为k,圆环从内往外编号取值为k=0...K-1。根据要选取组成UCA的节点的数目M,以原点为起点,作M个等角度间隔的射线(x轴正方向为第0条射线,角度为0,所有射线按逆时针方向编号为m=0...M-1)将上述每一个圆环切分成大小相同的环块,相邻射线角度间隔记为Δφ:
(5)
第m条射线和第m+1条射线之间的扇区编号为m,m=0...M-1。在上述圆环编号和扇区编号的基础上,将第k个圆环,第m个扇区相交构成的环块编号为(k,m),k=0...K-1,m=0...M-1,其极坐标中心点为(rk,m,φk,m),直角坐标中心点为(xk,m,yk,m),直角坐标和极坐标的关系满足(1)和(2)。
2.1.2确定处于各个环块区域内的节点的方法
已知n号节点的极坐标(rn,φn),若极坐标满足下述条件:
(6)
(7)
则第n号节点位于第(k,m)个环块内。
2.1.3选取某个环块内最优节点的方法
在确定各个节点所处的环块后,一般情况下,某个环块内可能包含多个节点,此时需要从多个节点中选取离当前環块UCA参考点(环块的极坐标中心点)位置最近的节点,作为当前环块的最优节点。选取方法按照直角坐标系中节点和参考UCA点距离最小的原则进行。据此,选取第(k,m)个环块内最优节点的计算方法如下:
(8)
其中,n为第(k,m)个环块内的节点编号。
2.1.4选取多组近似UCA的节点的方法
对第k个圆环内所有的M个环块执行上述选取环块最优节点的操作,即可选取到以第k个圆环各个环块的极坐标中心点为参考的M个节点,这M个节点即可组成近似UCA。
对k=0...K-1(即从内部圆环到外部圆环)执行上述操作,即可求得多个由M个节点构成的近似UCA。
2.1.5 选取最优UCA的方法
对求得的各个UCA节点计算其与所对应的标准UCA参考点的距离误差,选取误差最小的一组UCA节点作为本次算法执行的最优UCA节点。假设Sk,m为第(k,m)个环块内的最优节点编号,则第k个圆环对应的UCA误差计算方法如下:
(9)
2.1.6 最优UCA修正方法
以上所述为参考UCA的圆心固定为坐标原点(矩形区域的中心)时的算法。由于实际的节点分布没有规律,当圆心固定时,有可能遍历完所有的圆环仍然没有一组满足条件的近似UCA的节点。但是,只要圆心做小步长移动后,以移动后的圆心重复上述选取UCA的方法,就能找到一组近似UCA的节点。同时,圆心作小范围移动,再重复上述操作也更容易找到精度更高的近似UCA节点。
因此,为了尽可能避免选取不到合适的近似UCA节点的情况,也为了能选取到精度更高的UCA节点。本文的方法假设圆心在的正方形区域内从左至右、从上到下范围内以Δd为步长移动。
(10)
d为传感器节点之间的平均间距,w控制圆心移动步长的大小,影响最终选取到的近似UCA节点的精度),每移动一次,执行上述选取最优UCA的方法,确定当前圆心对应的最优UCA节点,比较不同圆心的最优UCA节点,选取与相应参考UCA节点距离误差最小的近似UCA节点即为本算法最终得出的最优UCA节点。在实际算法执行过程中,为了便于计算,本文假设圆心固定于原点,通过调整所有节点的位置来表示圆心位置的变化。
根据上述选取最优UCA的方法可知,本文的方法选取到的UCA精度受矩形区域内物联网传感器节点密度的影响,节点密度越高,选取的UCA的精度也越高。同时,节点的密度也影响选取组成UCA的节点的个数,节点密度越高,能够选取作为近似UCA的节点个数也越多。参考上述的方法描述,本文在节点区域内选取近似UCA的节点的步骤如下所述
2.1.7 选取近似UCA节点的具体步骤
假设传感器节点的位置为已知信息,基于前述的变量和已知条件,本文选取近似UCA节点的具体步骤如下:
步骤一、初始化设置:根据节点的平均间距d设定圆周半径间隔Δr;设置需要选取组成UCA的节点个数M、最小半径rmin,rmax,利用公式(4)和(5)计算圆环个数K和射线角度间隔Δφ;根据(10)设置圆心调整的步长Δd;将所有遍历搜索序号初始化为0,遍历序号包括:圆心直角坐标x轴位置索引i,圆心直角坐标y轴位置索引j,圆环索引k,扇区遍历索引m。执行步骤二。
步骤二、设置所有传感器节点坐标为:
获取位置调整后相应的极坐标(ri,j,n,φi,j,n),执行步骤三。
(11)
(12)
步骤三、选取满足(11)、(12)的传感器节点,若没有节点满足条件,执行步骤六,否则,执行步骤四。
步骤四、在步骤三选取的节点集合中选择与环块(k,m)极坐标中心点距离最小的节点,选取方法如下
(13)
记录下最小值对应的节点编号n,记为Si,j,k,m=n(Si,j,k,m里存放的是圆心位置为()时,第(k,m)个环块里最优节点的编号),即为当前环块中的最优UCA节点,执行步骤五。
步骤五、判断m=M-1是否成立。若不成立,将扇区遍历序号m加1,即m=m+1,执行步骤三;若成立,计算当前圈的距离误差和,计算方法如下:
(14)
执行步骤六。
步骤六、判断k=K-1是否成立。若不成立,将圆环遍历序号k加1,即k=k+1,设置m=0,执行步骤三;若成立,执行步骤七。
步骤七、判断j=J-1是否成立。若不成立,将圆心y坐标索引j加1,即j=j+1,同时,令m=0,k=0。执行步骤二;若成立,执行步骤八。
步骤八、判断i=I-1是否成立。若不成立,将圆心x坐标索引i加1,即i=i+1,同时,令m=0,k=0,j=0。执行步骤二;若成立,执行步骤九。
步骤九、从ei,j,k里面选取最小值,即
min(ei,j,k) (15)
返回值为最小误差,假设最小误差的序号为(i0,j0,k0),则Si0,j0,k0,m,(m=0...M-1)对应的M个节点即为算法选取到的近似UCA分布的最优节点,相应的即为被选中的节点的极坐标角度。此时,圆心坐标()即为所选取的近似UCA的圆心。将被选中的节点编号Si0,j0,k0,m,被选中的节点极坐标角度,UCA的圆心坐标()作为算法的执行结果返回。
2.2基于涡旋电磁波的物联网大容量上行传输具体步骤
采用OAM的方法进行大容量传输时,发射机需要已知所有数据信息,之后采用OAM调制方法对数据进行调制才能通信。传统的基于UCA的OAM大容量通信方法一般都是集中式的收发机,此时发射机拥有所有数据信息,满足上述OAM传输的基本条件。而对于本文所提的分布式OAM传输方法,各个传感器节点数据时独立的,因此,若要进行OAM传输,被选中的近似UCA的传感器节点必须拥有所有传感器节点的数据信息。为了满足这个条件,本文假设所有传感器节点定时无线广播自己的数据,使得所有传感器之间能数据共享。
结合上述假设,在上一节选取近似UCA节点的方法基础上,本文所提出的基于涡旋电磁波的物联网大容量上行传输方法具体步骤如下所述:
步骤一、获取节点区域每个节点的编号和绝对位置(一般情况下,在部署传感器节点时,节点的编号和绝对位置便已经确定,且存于数据库中)
步骤二、基于节点的编号和位置采用上述选取近似UCA节点的方法离线计算出近似UCA的节点集合,记录被选取的节点编号和极坐标角度,以及UCA的圆心位置。
步骤三、空中无人机基站获取步骤二所得到的节点标号、极坐标角度和圆心位置信息后,飞行至待采集数据的传感器节点上空圆心位置处时,广播传感器节点编号和极坐标角度信息给下方所有节点,同时也起到了通知下方节点上传数据的作用。
步骤四、下方传感器节点收到节点编号信息后,比较自身编号与基站所发送的被选取节点编号,确定自身是否被选择作为近似UCA节点。被选中的传感器节点根据空中基站提供的极坐标角度配置OAM相位,配置方法如下:
假设被选中的节点编号为n,空中基站提供的极坐标角度为φn,若目标OAM模态为l,则当前节点发射OAM相位配置为lφn。
步骤五、被选中的传感器节点采用基于UCA的OAM大容量传输方法上传数据至空中基站(基于UCA的OAM通信方法可参照文献[8],其中的相位配置可参照步骤四的相位配置)。
三、仿真分析
为了验证本文所提方法的可行性,针对图1所示大量传感器节点向无人机空中基站上传数据的场景,以下给出仿真验证。仿真参数如表1所示。
在随机分布的节点区域选取到近似UCA的节点的结果如图3所示(由于后续在仿真幅度和相位图时,需要将距离刻度设置为毫米(mm)才能看到涡旋的分布情况,为了保持距离刻度的一致性,这里将所有仿真结果的距离刻度都设置为mm)。
如图3中所示,原始节点采用*号标出,被选中的节点以O圈出,相应的参考UCA节点用+标出。通过观察可以发现,被选中的节点为离参考节点距离最近的节点。仿真得出的最优UCA的圆心位置在(400,200)处。
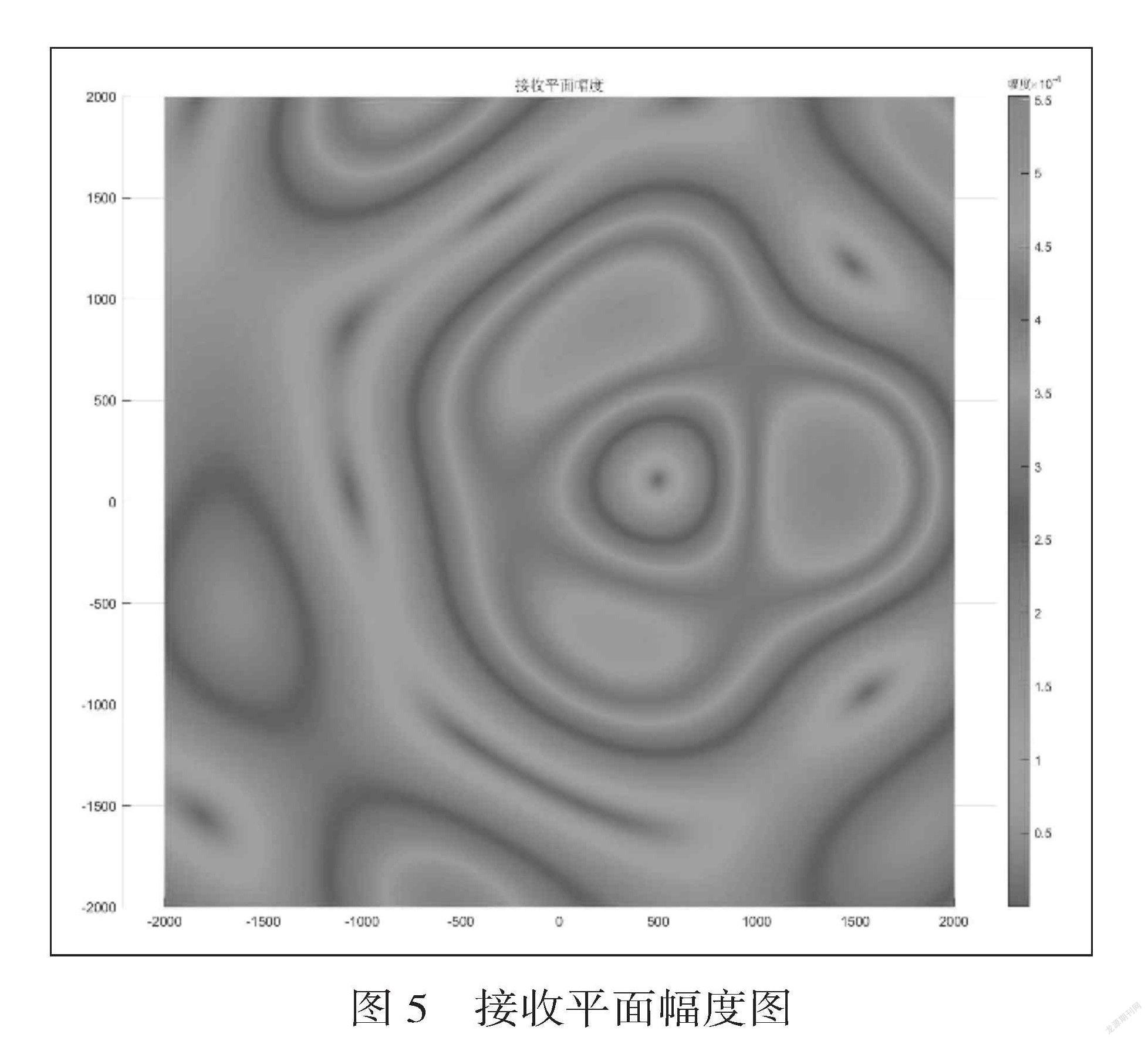
对被选中的节点采用本文的方法进行OAM调制,以模态1为例,在距离传感器节点平面正上方300米位置(无人机基站的飞行高度)的观察平面上得到的幅度和相位图如图4和图5所示。
从图中可以看出,幅相图中涡旋的中心在算法所求出的圆心位置(400,200)处。涡旋虽然存在畸变,但是接收平面的相位仍然保持一定的涡旋特性,接收平面上幅度仍然保持一定的对称性,证明了OAM模态间仍有一定的隔离度。
分别用模态1、2、3发射,采用模态-3到3接收,采用如下隔离度计算计算方法进行计算:
假设目标接收模态为l',用目标接收模态的接收功率对所有模态接收功率进行归一化,并转化为dB表示,可得各个模态的隔离度I(l):
(16)
其中,Pl为模态l的接收功率,Pl'为目标模态的接收功率,得到的隔离度仿真结果如图6所示:
从图中可以看出,模态1、2、3和其他模态都有一定的隔离度,相邻模态的隔离度较低(如模态2和模态1、3之间只有12dB左右的隔离度),当模态相差较大时,隔离度增大(如模态1、2、3和模态-3有60dB以上的隔离度)。
根据隔离度仿真,采用如下公式进行频谱效率仿真:
(17)
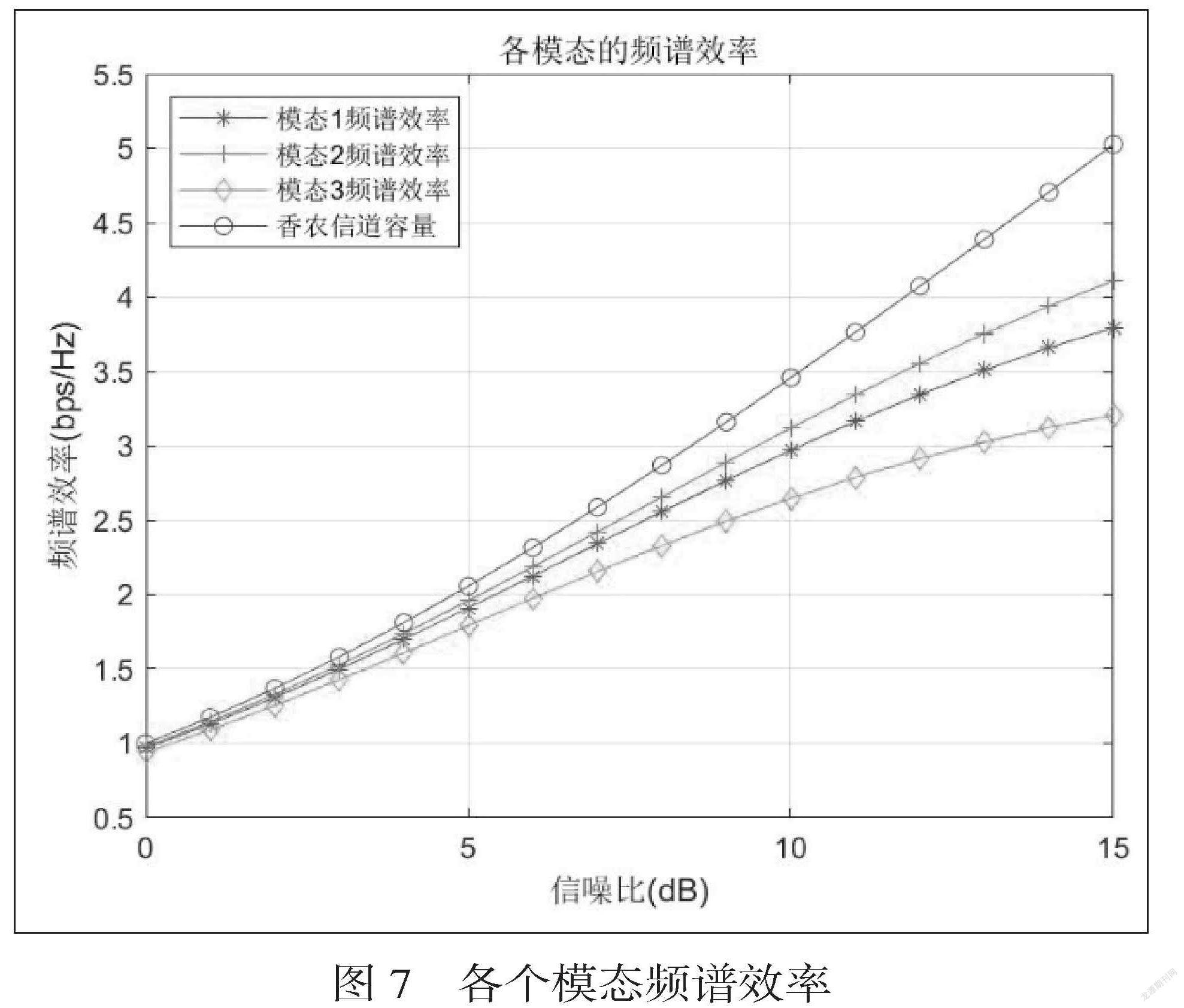
其中N0为噪声功率。得到的结果如图7所示。
从图中可以看出由于模态间存在干扰,各个模态的频谱效率低于香农极限,但是数值相差不大。根据图中所示,当信噪比为15dB时,模态2的频谱效率为4bps/Hz,模态1的频谱效率为3.8bps/Hz,模态1的频谱效率为3.3bps/Hz,如果采用 ±1、±2、±3这6个模态复用,可以得到大于22bps/Hz的频谱效率。当复用模态增多时,频谱效率还能进一步提升。
当前无线通信的频谱效率值一般低于10bps/Hz,从仿真可知,相对于传统的物联网节点数据回传方案,本文提出的方案有着极大的频谱效率提升。
四、结束语
随着物联网节点数量的不断增长,传感器采集的海量数据需要上传至基站,急需大容量无线通信上行传输方案。本文从UCA可用于OAM通信的角度出发,基于传感器节点分布式的特点,提出基于涡旋电磁波的物联网大容量上行传输方法。从传感器节点区域选择近似UCA,从而用OAM通信的方式极大地提升了传感器节点数据上传的速率。
本文的方案无需额外的硬件配置,僅利用现有节点通过算法实现OAM传输,传输效率高,系统开销小,非常适用于物联网节点与基站之间的短时高速上行传输。
参 考 文 献
[1]郑庆刚. 5G标准及其发展愿景 [J]. 广播电视网络, 2021, 28(07): 23-5.
[2]黄盛, 解文艳, 黄楚鸿, et al. 电力物联网在电网的应用方案研究 [J]. 南方能源建设, 2021, 8(S1): 20-5.
[3]黄旭凤. 5G通信技术背景下物联网应用发展窥探研析讨论 [J]. 科技与创新, 2021, 14): 38-9+43.
[4]石宇. LoRa无线技术在高校节能工作中的应用 [J]. 信息技术与信息化, 2021, 04): 148-9.
[5]杨峰, 庞志成, 武文学. 窄帶物联网技术与应用探讨 [J]. 中国新通信, 2021, 23(05): 38-9.
[6]陈光瑞. 5G“超级上行”解决方案浅析 [J]. 中国新通信, 2020, 22(21): 44-6.
[7] CHEN R, ZHOU H, MORETTI M, et al. Orbital Angular Momentum Waves: Generation, Detection, and Emerging Applications [J]. IEEE Communications Surveys & Tutorials, 2020, 22(2): 840-68.
[8] THIDé B, THEN H, SJ?HOLM J, et al. Utilization of photon orbital angular momentum in the low-frequency radio domain [J]. Physical Review Letters, 2007, 99(8): 087701.
[9] SASAKI H, LEE D, FUKUMOTO H, et al. Experiment on Over-100-Gbps Wireless Transmission with OAM-MIMO Multiplexing System in 28-GHz Band; proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), F 9-13 Dec. 2018, 2018 [C].
[10] CHENG W, JING H, ZHANG W, et al. Achieving Practical OAM Based Wireless Communications with Misaligned Transceiver; proceedings of the ICC 2019 - 2019 IEEE International Conference on Communications (ICC), F, 2019 [C].
[11] ZHANG C, ZHAO Y. Orbital Angular Momentum Nondegenerate Index Mapping for Long Distance Transmission [J]. IEEE Transactions on Wireless Communications, 2019, 18(11): 5027-36.
[12] LIANG L, CHENG W, ZHANG W, et al. Orthogonal Frequency and Mode Division Multiplexing for Wireless Communications; proceedings of the GLOBECOM 2018 - 2018 IEEE Global Communications Conference, F, 2018 [C].
[13] LIANG L, CHENG W, ZHANG W, et al. Joint OAM Multiplexing and OFDM in Sparse Multipath Environments [J]. IEEE Transactions on Vehicular Technology, 2020, 69(4): 3864-78.
[14] YU W, ZHOU B, BU Z, et al. Analyze UCA Based OAM Communication From Spatial Correlation [J]. IEEE Access, 2020, 8(194590-600.
[15] 王浩宇.(2018).无人机在无线通信领域的应用.电信快报(02),9-12. doi:CNKI:SUN:DXKB.0.2018-02-003.
项目资助信息:四川省省院省校科技合作研发项目,项目编号:2021YFSY0004
王弢(1982.03-),女,汉族,江苏南京,硕士,工程师,主要研究方向:电力系统及其自动化、电力物联网;
琚诚(1977.01-),男,汉族,浙江浦江,硕士,工程师,主要研究方向:宽带移动通信、物联网。
