FDR土壤水分传感器田间性能测试分析
2021-02-25钟永红岳焕芳孟范玉
吴 勇,钟永红,杜 森,姚 丽,岳焕芳,孟范玉
(1.全国农业技术推广服务中心,北京100125;2.农芯科技(北京)有限责任公司,北京100097;3.北京农业技术推广站,北京100125;4.农业部农业信息软硬件产品质量检测重点实验室,北京100125)
0 引 言
我国是世界上13个贫水国之一,人均水资源占有量仅为世界人均水平的1/4。与此同时,我国是一个农业大国,水资源稀缺很大程度上阻碍了农业的健康发展,要实现农业的可持续发展,应该合理利用水资源[1]。根据不同作物对水分的需求,选择不同的灌溉方式,可以实现对水分的高效利用[2,3]。因此,准确了解土壤含水量,能够为作物选择恰当的灌溉方式,有效节约水资源。
在土壤含水量的测量方法中,烘干法是最简单、应用最广泛的方法。由于该方法是一种直接测量方法,因此可作为其他方法的参考标准[4]。采用烘干法时,通常采用环刀等工具在野外采集土样,然后在实验室进行烘干、称重和计算。这种方法不方便取样和储存,且浪费时间和精力,效率较低[5]。另外,采样对土壤具有破坏性,长期测量需要不断改变土壤采样点,不利于长期连续定点监测。土壤本身的变异性也会导致测量结果的差异。目前,随着科学技术的发展,传感器技术应运而生,使得土壤传感器的应用越来越广泛。与烘干法相比,土壤水分传感器具有在同一地点长期连续观测含水量、安装方便、对土壤结构无损伤等优点[6],因此土壤水分传感器代替烘干法测定土壤水分含水量成为了可能[7]。
市面上存在多种类型的土壤水分传感器,由于测试原理、设计结构的不同造成了不同类型土壤水分传感器性能的差异,国内外专家学者在不同类型土壤水分传感器性能测试方面开展了许多研究。舒素芳等对FDR 土壤水分传感器与人工土壤相对湿度观测资料进行了质量对比分析,发现FDR 传感器对土壤水分变化的敏感程度较低并且传感器测定数据与人工测定数据相比普遍偏小[8]。吴日峰等对国产FDR 传感器和美国的FDR 传感器进行室内外同步观测试验,结果表明在土壤水分含量较低时,国产FDR 传感器的准确性优于美国FDR 传感器[9]。叶志杰等对EC−5 和5TE 两种FDR 传感器进行了性能测试与校正,认为EC−5和5TE的电学性质对温度、电导率和pH值变化敏感,并给出了温度效应、电导率效应和pH 效应的补偿模型[10]。Heidi Mittelbach 等对4种不同原理的土壤水分传感器在瑞士野外进行性能测试实验,发现在所研究的条件下,4种传感器均不符合各自的制造商规范,需要针对特定场地重新校准[11]。随着物联网技术的快速发展,目前国内大力推广传感器测墒技术,国内外学者研究主要以进口设备为主,结构均为探针式传感器,探管式传感器具有安装方便等优点,成为国内应用主流。因此针对国内大力推广测墒技术,有必要开展FDR探管式传感器的研究。《2020年数字乡村发展工作要点》中提出强化土壤墒情监测工作,国内FDR 传感器应用最为广泛,但设备品牌众多,测试精度性能不一,为了解不同FDR 传感器的性能,选取市面上最常见的3种FDR 传感器,对田间观测试验观测结果进行分析,为传感器监测土壤水分技术应用提供理论基础。
1 材料方法
试验在北京市昌平区国家精准农业研究示范基地(116°46'E,40°18'N)进行,试验所用的土壤水分传感器是基于FDR 技术的3种国产传感器,传感器参数情况见表1。为保证安装灌浆后,土壤水分充分运移沉降,传感器提前于2018年10月安装,正式试验从2019年2月1日开始,10月20日完成数据收集,考虑覆盖通常的3种土壤水分传感器统一安装在同一考核场地内,相邻传感器的间隔距离为1 m,各传感器每隔1 h 采集1次数据,并自动上传到全国土壤墒情监测系统网站(www.soilmoisture.org.cn)。资料均以天为单位进行统计整理,共收集了261 d 的土壤水分观测数据、传感器运行总时长和传感器正常运行时长。

表1 传感器基本参数Tab.1 Basic parameters of the sensor
另外,人工烘干法采集数据也在田间同期进行,在传感器监测点周围使用土钻取不同深度(0~20、20~40、40~60 和60~80 cm)的土壤,每隔1 周取土1次。取土后利用烘干法测定不同土壤深度的土壤含水量,如遇有降雨量超过5 mm 以上情况,降雨停止后2 h 内加测一次(如夜间降雨停止,则次日上午加测)。
1.1 传感器差异性评价指标
计算3种传感器的各月的土壤含水量平均值及变异系数,通过比较不同月份的土壤含水量平均值以及变异系数的差值大小,来评价传感器之间的差异性。其中变异系数可由下式计算得出式中:C.V为变异系数;SD为标准偏差;MN为平均值。

1.2 传感器数据传输稳定性评价指标
正常率是评价传感器数据传输稳定性的一个指标,由传感器的运行总时长和正常传输时长计算得出,计算方法如下式。

式中:T为总时长;N为正常传输总时长。
1.3 传感器的二次标定过程
人工烘干法一直被认为是最精确的测量土壤含水量的方法,因此将传感器所测数据与人工烘干法所测数据用多元回归进行线性拟合,得到3种传感器的标定方程。
2 结果分析
2.1 FDR土壤水分传感器田间应用评估
对3种土壤水分传感器田间试验数据整理后,绘制0~20、20~40、40~60 和60~80 cm 4个土层的土壤含水量序列图,如图1所示。可以看出,3种土壤水分传感器的观测值随时间呈波动性变化,不同类型土壤水分传感器变化趋势一致。在时间变化方向,3种土壤水分传感器的观测值在2−6月曲线波动较小,在7−10月曲线波动较大,以Q1土壤水分传感器在土层深度为0~20 cm 的曲线变化较为明显,Q1 土壤水分传感器在2−6月出现了5次明显的峰值,而在7−10月出现了8次峰值。这是由于发生降雨事件时,土壤含水量增加到峰值,降雨量在7−8月较为集中,日降雨量分布在20~80 mm 范围内。以7月29日为例,该日降雨量为44.9 mm,传感器Q1、Q2和Q3在0~20 cm 的土壤含水量增幅分别为81.58%、5.64%、16.41%;在20~40 cm 的土壤含水量增幅分别为14.49%、2.83%、14.81%;在40~60 cm 的土壤含水量增幅分别为31.95%、0.23%、2.89%;在60~80 cm 的土壤含水量增幅分别为41.18%、0.30%、10.41%。在空间深度方向,0~20 cm 土层土壤水分传感器曲线波动剧烈,出现了多次波峰、波谷特征,随着土层深度的增加,土壤水分传感器曲线波动变缓,尤其传感器Q1 变化较为明显,在0~20 cm 出现13次明显的峰值,在20~40 cm出现峰值的次数减少为5次。
综上可以看出,3种土壤水分传感器在时间和深度方向变化趋势一致,对降雨量具有明显的响应过程,但不同传感器之间的绝对数值有所差异。

图1 3种FDR土壤水分传感器土壤含水量随时间变化过程图Fig.1 Three FDR soil moisture sensors soil moisture change process with time
2.2 FDR土壤水分传感器的差异性
2−10月3种传感器各月土壤含水量平均值情况如图2所示。土层深度为0~20 cm时,传感器Q2 的整体数值最高,其次是传感器Q3 和Q1。2−10月传感器Q1、Q2 和Q3 的土壤含水 量 平 均值 在6.38%~28.84%、14.56%~37.92% 和11.45%~28.51%范围内变化,其中3种传感器最高值出现在8月,Q1传感器的土壤水分最低值在6月,Q2和Q3最低值出现在2月。土层深度为20~40 cm时,2−7月仍然是传感器Q2的数值偏高,到8−10月传感器Q1 的监测数值升高,传感器Q3 的数值整体上均偏低。2−10月传感器Q1、Q2 和Q3 的土壤含水量平均值分别在3.28%~40.55%、23.38%~37.54%和18.84%~29.29%范围内变化,其中最高值均出现在8月,最低值均出现在2月。土层深度为40~60 cm时,3种土壤水分传感器的差异性有所减小,传感器Q1、Q2 和Q3 土壤含水量平均值的变化范围分别为19.88%~42.12%、31.92%~36.71%和33.59%~39.74%。土层深度为60~80 cm时,3种土壤水分传感器的差异性又有所增加,除8月份以外3种传感器的数值由大到小排序依次为:Q2>Q1>Q3。

图2 3种FDR土壤水分传感器月均土壤含水量变化Fig.2 Monthly average soil moisture change of three FDR soil moisture sensors
2−10月3种土壤水分传感器的变异系数如表2所示。从整体来看,3种土壤水分传感器在0~20 cm 土壤深度的差异性较大,平均变异系数较高为0.36,而在其他3个土层的差异性相对较小,其中40~60 cm 土壤深度的平均变异系数最小为0.11。从不同月份来看,表层土壤(0~20 cm)传感器的变异系数在6−7月明显增加,增幅16.0%,其他土层变异系数随时间呈微小波动。

表2 传感器差异性对比结果Tab.2 Results of sensor difference comparison
2.3 土壤水分传感器的数据传输稳定性
3种土壤水分传感器的数据传输稳定性分析结果如表3所示。由表3可知,传感器Q1、Q2 和Q3 均运行261 d 共计6 264 h,但数据正常传输时间有所差别。传感器Q1与Q2的正常率较高,均在90%以上,传感器Q3 的正常率较低为81%,造成数据异常传输的主要原因有设备缺电、物联网欠费等。

表3 传感器数据传输稳定性分析结果Tab.3 Results of the stability analysis of sensor data transmission
2.4 FDR土壤水分传感器的原位二次标定模型构建
将一个土壤水分传感器所有土层的数据与人工测得的数据进行拟合得到一个标定方程,具体方法为:以传感器观测的土壤含水量值作为x轴,人工烘干法测得的土壤含水量值作为y轴,分别进行一次线性拟合,得到传感器Q1、Q2和Q3的拟合效果如图3所示,可以看出Q2 的标定结果较其他两个传感器标好,其相关系数为0.571 7。

图3 FDR土壤水分传感器的标定方程Fig.3 Calibration equation of FDR soil moisture sensor
将传感器Q1、Q2 和Q3 观测数据分别带入二次标定方程得到标定后土壤水分含水量,图4为标定后的2019年2月1日至10月20日3种土壤水分传感器的土壤含水量序列和日降雨量序列。对比图1和图4可以看出,3种土壤水分传感器的曲线变化趋势比标定前更加一致,波动曲线几乎重合,尤其是0~20 cm,标定前3种土壤水分传感器的绝对数值差异性较大,最大差值达到27.71%,而标定后波动曲线较为接近,最大差值不超过10.81%。此外,原位二次标定校正了土壤水分传感器的异常数据,传感器Q1 在60~80 cm 土层,8−9月降雨量较大时,标定前观测值远大于其他传感器观测值[图1(d)],传感器Q1与其他两个传感器之间的最大差值为44.03%,标定后观测值过高的情况改善,传感器Q1 与其他两个传感器之间的最大差值减小为9.95%[图4(d)]。
图5为标定后的传感器各月土壤含水量平均值情况。对比图2和图5,标定前3种土壤水分传感器的土壤含水量平均值差异性较大,标定后差异性明显减小,尤其是在土层0~20 cm,标定前传感器Q1、Q2、Q3 的土壤含水量平均值变化范围相差较大,分别为6.38%~28.84%、 14.56%~37.92%、11.45%~28.51%,而标定后土壤含水量平均值变化范围(除Q1 在2月的数值外)非常相近,分别变为16.52%~21.25%、15.92%~21.53%、17.24%~20.60%。
3 讨 论
通过分析传感器田间评估,发现3种土壤水分传感器的观测值随时间变化的趋势相似,但绝对数值差异过大。虽然3种土壤水分传感器采用同一测量原理—FDR技术[12],但由于不同厂家传感器的设计结构以及制造工艺的差别,以及出厂标定时不同厂家对影响传感器性能的因素如温度、容重等补偿程度不同,标定方程形式不同,导致不同传感器在测试同一土壤含水量时读数有所差异。苏志诚等对2种FDR 传感器的性能进行分析,也发现2种传感器存在一定的差异性,与烘干法比较的均方根偏差分别为2.8 和3.8,相对误差分别为9.9%和13.8%[13]。

图4 FDR土壤水分传感器二次标定后土壤水分随时间变化过程Fig.4 Change process of soil moisture after the second calibration of FDR soil moisture sensors with time

图5 3种FDR土壤水分传感器标定后月均土壤含水量变化Fig.5 Changes of monthly average soil moisture content after calibration of three FDR soil moisture sensors
通过对比变异系数,可以看出3种土壤水分传感器在土壤表层和6−8月的变异系数较大。研究表明,土壤温度在夏季较高,并随土层深度的增加而减小[14],表层土壤的温度和水分变化较为剧烈且土壤变异系数较大[15,16]。温度会影响土壤的表观介电常数,而FDR 技术通过测量土壤的表观介电常数进而得到土壤含水量,当温度变化时,土壤的表观介电常数的测量值也发生变化,导致FDR 传感器的测量值也随之发生变化[17−19],具体表现为温度越高,其测试的土壤含水量输出值越大[20,21]。另外,由于不同土壤水分传感器对温度的敏感程度有所差别,最终造成了在高温条件下设备差异性增加。为解决这个问题,许多研究人员通过采集样本数据进行分析处理,建立FDR 土壤水分传感器温度补偿模型,对FDR 传感器进行温度补偿后,减小温度对土壤水分传感器的影响,补偿结果与实际土壤含水量的差距减小[22,23]。
有学者研究表明,传感器受土壤结构变化、蒸发、土壤类型等因素的影响,观测值与真实值存在一定的误差[24,25]。陈海波等人对GStar−I 型FDR 土壤水分传感器的标定结果进行分析,检验结果表明标定后的FDR 土壤水分传感器观测数据与人工观测数据具有较好的一致性[26]。本文利用田间原位标定方法对3种FDR 传感器进行标定有效减小了FDR 传感器之间的差异性,标定后不同土层的传感器变异系数如表4所示,在土层0~20、20~40、40~60 和60~80 cm 分别降低了64%、62%、53%和66%。因此,在FDR 传感器的应用中建议在原位进行二次标定,来消除误差值。
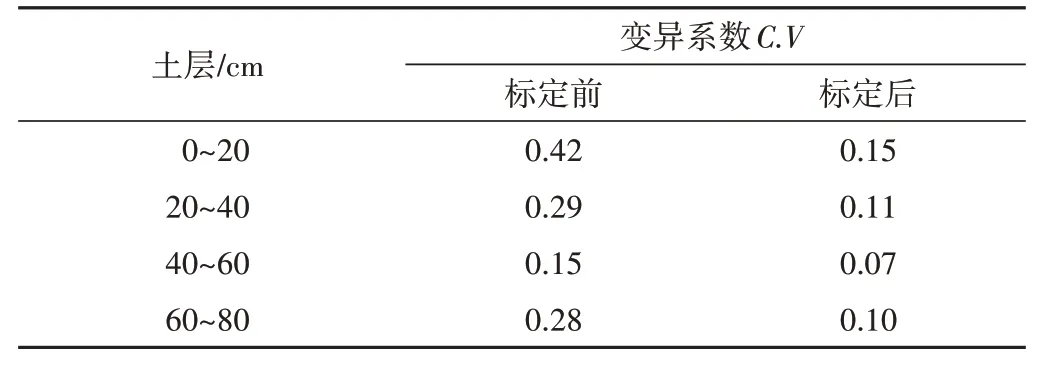
表4 3种传感器标定前后变异系数对比Tab.4 Comparison of coefficient of variation of three sensors before and after calibration
4 结 论
3种土壤水分传感器的观测值的曲线变化规律一致,在空间上表现为随着土层深度的增加,土壤含水量曲线波动幅度减小,在时间上由于受降雨因素的影响,土壤含水量曲线在夏季(6−8月)波动幅度较大。3种土壤水分传感器的绝对数值差异较大,尤其是土壤表层(0~20 cm),变异系数比较大为0.42,而在20~40、40~60 和60~80 cm 的变异系数分别为0.29、0.15 和0.28。受土壤温度的影响,土壤水分传感器之间的差异性在夏季和土壤表层较大,夏季的变异系数相对于其他季节较大,增幅为16%,土层0~20 cm 的变异系数相对于其他土层较大,增幅为38%以上,建议在对土壤水分传感器标定时应实时考虑温度因素进行补充校定。通过数据拟合,分别建立了3种土壤水分传感器土壤水分的原位二次标定方程,标定后的3种土壤水分传感器之间的绝对数值差异性明显减小,其变异系数在0~20、20~40、40~60、60~80 cm 分别减小了64%、62%、53%和66%。在农田应用中,应考虑土壤温度、土壤类型因素对FDR 传感器原位二次标定的影响,以消除不同传感器工厂标定的差异性。