长大隧道贯通前铺轨CPⅡ导线陀螺方位约束应用探讨
2021-02-24王广科王正邦陈光金付宏平
王广科, 王正邦, 陈光金, *, 付宏平
(1. 中铁隧道集团一处有限公司, 重庆 401123; 2. 陕西省铁道及地下交通工程重点实验室(中铁一院), 陕西 西安 710043)
0 引言
我国隧道工程建设项目众多,特长隧道的建设工期一直是制约全线竣工通车的瓶颈。采用隧道整体贯通前提前实施轨道铺设[1-2]的施工组织方案,可以大大缩短施工工期、节省大量施工费用、产生良好的社会效益,因而受到建设单位的青睐。由于该方案实施的技术难度大,一直是近年隧道施工测量的研究方向[3-5]。
对于采用一边开挖掘进施工,一边对已经贯通衬砌段分期、分段提前铺设无砟轨道的隧道来说,需要分期建立洞内CPⅡ导线用于轨道铺设。此时,洞内CPⅡ导线具有双重功能,既要在衬砌完工段用于轨道铺设,又要在开挖掘进段从洞内CPⅡ导线终点向前延伸,指导洞内后续开挖掘进施工,起到洞内施工控制导线的作用。在隧道采用平导施工而无斜井方位角附合条件时,洞内CPⅡ导线为一条交叉支导线网。如何保证隧道准确贯通、洞内CPⅡ导线与隧道建筑限界匹配、隧道贯通前后相向施工的无砟轨道无缝对接是精密控制测量中的技术难题。这种施工方案需要保障隧道洞外施工控制网[6-8]及洞内控制网精度,确保最后掘进段贯通误差小,满足轨道铺设精度要求。洞外施工控制网采用卫星定位技术,其精度易于保证;而洞内CPⅡ导线的精度保障[9-11]是关键问题。对采用平行导坑方式施工的山岭特长隧道来说,以优先采用加测高精度陀螺方位边[9]的方式予以实现。本文所述的陀螺坐标方位角,是根据洞口地面陀螺方位、CPⅡ进洞导线公共边陀螺定位测量方位角的关系进行换算后的结果,与本隧道CPⅡ坐标方位角属于相同的坐标系统基准。
目前,陀螺方位边的工程应用及研究文献资料较多,主要集中在铁路隧道、城市地铁、矿山等地下工程的施工掘进过程中。其主要用于地下掘进时控制导线的坐标方位角检核[12-14],或校正调整前进方向的方位角[15-17],个别工程以陀螺施测方位作为观测值参加导线方向平差[18-19],采用陀螺方位约束[20-21]的工程实践较少。而在提前铺设无砟轨道的隧道实践中[1-2],虽然洞内控制导线中引入了陀螺方位[9],但尚无CPⅡ导线基于陀螺方位边约束的应用经验,现有文献也主要从陀螺定向边位置数量的选择、测量方法与计算、陀螺方位角观测值的应用区间等方面进行研究。
本文以某特长隧道整体贯通前分段铺设无砟轨道的工程实践为例,在洞内铺轨CPⅡ导线中尝试加测高精度陀螺方位边,解决隧道采用长距离平导施工、洞内导线无方位角附合条件下,与平导联测形成的“回头”型导线由于布网方案欠佳,精度难以提高,难以满足铺轨精度要求,贯通面前后的轨道铺设可能错位的工程难题。
1 依托工程概况
某特长隧道全长13.195 km,最大埋深为650 m。洞身线路采用人字坡设计,隧道除进口段33.92 m及出口段429.84 m位于半径为800 m的曲线上外,洞身其余地段均位于直线上。隧道分进口、1号斜井、2号斜井、隧道出口、出口平导5个作业面。在隧道没有全部贯通(剩余1.273 km)的情况下,确定提前开展洞内已经贯通段落的整体道床铺设工作,共分3期铺轨。隧道掘进施工和铺轨计划见图1。
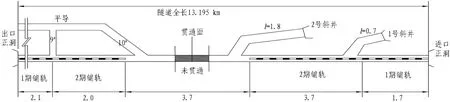
图1 隧道掘进施工和铺轨计划示意图(单位: km)
2 CPⅡ导线加测陀螺方位边必要性分析
在隧道未全部贯通的条件下,一边施工掘进,一边分期、分段铺设整体道床的施工测量方案,要求贯通面处的贯通误差尽量小,以保障最后贯通段横向错位偏差、高程错台偏差满足短距离(正常距离为隧道全长)控制测量的闭合精度要求。使相向施工铺设的无砟轨道实现准确对接,满足前、后期整体道床平顺衔接需求,这是实施此类工程的最大难题,而如何保障洞外、洞内控制网的精度十分关键。
洞外铺轨平面控制网可以通过埋设强制对中标,采用高精度的一等GNSS技术施测;采用不引入约束基准误差的一点一方向法评价洞外原施工控制网的实际精度;采用以不损失基准网精度为原则的施工控制点选择处理技术,铺轨重建网测量中选择符合精度要求的原施工控制点作为铺轨控制点。
总结以往工程实践经验并结合现场测量情况分析可知: 本工程进口端可与1#、2#斜井口控制点联测,洞内铺轨平面控制网精度易于保障;而出口端为长距离平导方式施工,平导内控制点无法使用,与主洞连接的横通道仅30 m,出口端隧道洞内铺轨平面控制网精度保障困难。从图1中可以看出: 进、出口端洞内CPⅡ导线具有双重功能,不但要用于隧道轨道铺设,还要用于洞内后续施工的控制导线。完工段轨道铺设CPⅡ导线要求与隧道建筑限界匹配,后续施工控制导线以CPⅡ为起算基准,用于指导贯通面方向的开挖掘进施工。隧道洞内铺轨CPⅡ、CPⅢ控制网是按施工进度分期、分段建立,进口端1、2期CPⅡ导线有穿出斜井口与地面控制点附合的方位角检查条件,测量精度可以保障;而出口端采用平导施工,CPⅡ导线虽然可以通过平导与洞外附合,但会形成较大的“回头”型导线,布网方案欠佳,精度难以提高,难以满足铺轨精度要求。由于隧道主体未完全贯通,无法形成出口经贯通面至2#斜井的附合导线网,即出口端洞内CPⅡ导线无方位角附合检查条件,在出口─贯通面─2#斜井口处形成长达近10 km的支导线网,加上洞内观测环境条件差,地下水丰富,出水量大,水汽、烟尘影响严重,施工干扰大等诸多不利因素,实施过程中尽管采取了一些特殊措施(见图2),但经估算分析,仍难以控制整体贯通处的横向贯通误差。因此,提前铺轨隧道时在洞内CPⅡ导线中引入陀螺方位控制技术十分必要。

(a) 抬高视线强制对中墩 (b) 超短边(25 m)强制对中盘 (c) 小曲线对穿隧道双强制对中盘 (d) 双测站方式进洞
隧道洞内CPⅡ测量中引入陀螺方位控制技术,采用高精度全自动陀螺仪——中国航天BTJ-3型全自动陀螺寻北仪与徕卡TS16全站仪(标称精度1″,1 mm+1.5×10-6)组合进行对向观测陀螺方位角,陀螺方位角标称定向精度为3.6″。除了在“回头”型导线、布网方案欠佳、精度难以提高、难以满足铺轨精度要求的出口端加测2条陀螺方位边外,在进口端掘进段的衬砌终点加测1条陀螺边,在已经贯通地段1#、2#斜井间也加测2条陀螺方位边,实现对洞内CPⅡ支导线的方向控制。陀螺方位边布设位置见图3。
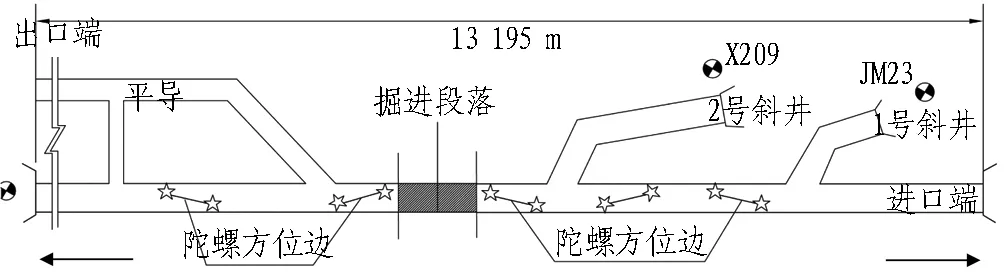
图3 陀螺方位边布设位置
3 特长隧道CPⅡ导线加测陀螺方位边应用条件研究
针对目前洞内CPⅡ导线没有应用陀螺方位的现状,根据该隧道洞内CPⅡ导线实际数据,开展CPⅡ导线利用高精度陀螺仪加测陀螺方位后的应用探索。利用式(1)—(2)将洞内陀螺方位边换算为隧道CPⅡ系统下的陀螺坐标方位角进行分析研究。
1)洞口外地面仪器常数
Δ=αJD-(αT-JD-γW)。
(1)
式中:αJD为洞外地面进洞已知边CPⅡ坐标方位角;αT-JD为洞外地面同名已知边上测得的陀螺方位角;γW为洞外设站点的子午线收敛角。
2)洞内陀螺定向待测边坐标方位角
F=(αT-γ)+Δ。
(2)
式中:αT为洞内待测边上测得的陀螺方位角;γ为洞内设站点的子午线收敛角。
3.1 陀螺坐标方位角精度匹配与较差限差标准研究
在研究时,首先以各洞口的进洞控制点为约束基准(见图3)进行支导线平差,获取各导线边的坐标方位角精度信息,共完成5条支导线平差。然后在全站仪导线、陀螺方位公共边上,按附合导线坐标方位角闭合差检查方式,进行铺轨CPⅡ交叉支导线网坐标方位角与陀螺坐标方位角的精度匹配研究。
导线坐标方位角与陀螺坐标方位角较差的限差标准分别采用3种不同方式进行研究,即按《高速铁路工程测量规范》[22]洞内二等限差、隧道二等限差以及不同精度的坐标方位角较差中误差法(简称较差法)综合分析。较差法是按误差传播定律,取2倍较差中误差作为限差,公式推导如下:
方位角较差
ΔFβ=F导线-F陀螺。
(3)
方位角闭合差限差
(4)
式(3)—(4)中:F导线为CPⅡ交叉支导线网陀螺公共边方位角平差;F陀螺为CPⅡ交叉支导线网陀螺边坐标方位角实际值;mF导线为CPⅡ交叉支导线网陀螺公共边方位角平差中误差;mF陀螺为交叉支导线网陀螺边坐标方位角实际值中误差。
鉴于mF陀螺受陀螺方位角测定精度、仪器常数测定精度、外界观测条件等多种因素影响,很难准确获取。经过分析,取为仪器标称精度基本合理,即mF陀螺=3.6″。

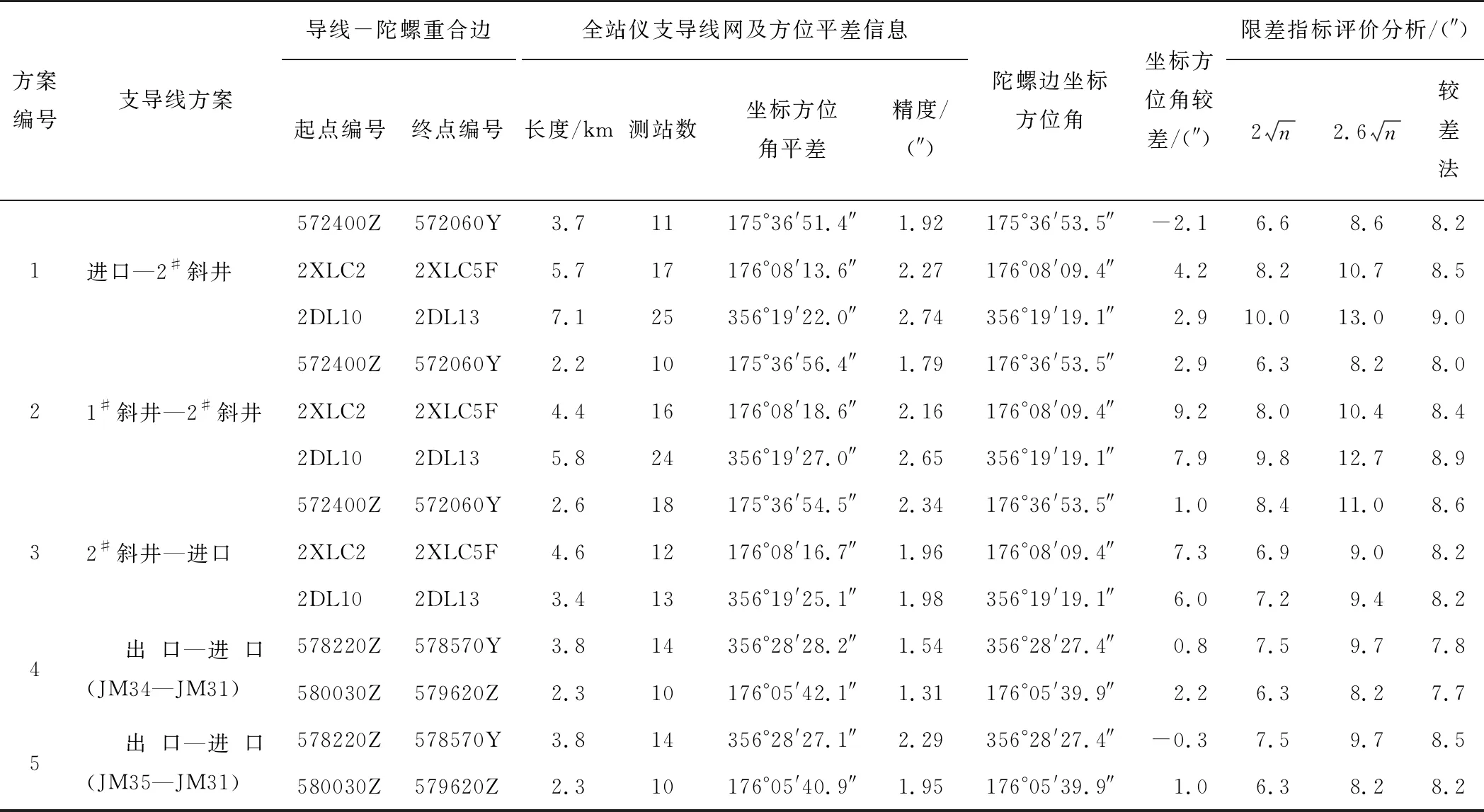
表1 铺轨CPⅡ交叉支导线网与陀螺坐标方位角精度与较差评价比较
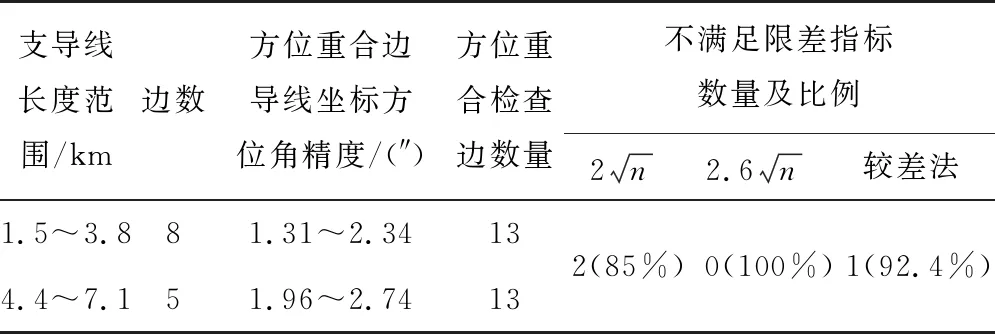
表2 坐标方位角精度与较差指标合理性统计分析表
从表1和表2中可以看出:
1) 短距离导线2~3 km加测陀螺方位边,CPⅡ支导线坐标方位角精度在1.31″~2.34″,略高于陀螺边坐标方位角标称精度(3.6″);长距离导线4~7 km加测陀螺方位边,CPⅡ支导线坐标方位角精度在1.96″~2.74″,由于陀螺坐标方位角测量精度评价体系与导线不同,实际精度应该小于标称精度(3.6″)。因此,本隧道CPⅡ导线边坐标方位角精度与陀螺边坐标方位角精度相当。
2) 高精度陀螺仪测量获取的坐标方位角与全站仪导线坐标方位角较差的限差指标,与按隧道二等导线设计精度计算的坐标方位角复测限差的精度评定指标值相当。因此,可采用隧道二等导线测角精度作为参照,制定二者方位角较差的限差指标。本隧道陀螺定向测算坐标方位角与对应边的全站仪导线坐标传递方位角的较差不大,与全站仪导线观测精度匹配,均能够达到铁路隧道二等导线精度,考虑2种坐标方位角精度相当,可以当作同精度扩展。鉴于高精度陀螺定向重复观测后方位角精度的可靠性及其误差的不传递性,2种方法测量结果的较差除了当作闭合差对待外,将高精度陀螺仪定向所得的坐标方位角用作精度等级大致相匹配的导线坐标方位角约束基准是适宜的。
3.2 隧道铺轨建筑限界匹配检查方法
隧道洞内CPⅡ导线是进行轨道铺设的基准,其必须与隧道建筑限界匹配,才能实现轨道放样的实地位置与隧道建筑限界匹配。实际上,采用隧道整体贯通后铺轨方式,最后的建筑限界基准为进出口间的CPⅡ附合导线,必要时,采用加入斜井导线的结点网。
对于整体贯通前分段铺设无砟轨道、利用平导施工而无斜井方位角附合条件的隧道,必须联测施工控制支导线点,采用CPⅡ支导线网加陀螺后的坐标进行比较,了解分析洞内陀螺CPⅡ导线与建筑限界关系,并作为洞内CPⅡ导线是否与隧道铺轨建筑限界匹配的检查依据。可以将施工控制支导线与CPⅡ导线的坐标差异换算为纵横向偏差,进行隧道建筑限界的符合性检查。
3.3 高精度陀螺仪CPⅡ导线的闭合差法检查
隧道洞内CPⅡ导线需要隧道铺轨建筑限界匹配。首先进行出口端支导线平差,将位置不同的高精度陀螺仪方位边和联测的施工导线点组合,当作已知坐标方位角和已知坐标值,按附合导线对待;然后采用闭合差法进行检查,包括坐标方位角闭合差检查、导线坐标闭合精度检查及建筑限界符合性检查,检查结果见表3和表4。
从表3和表4可以看出: 铺轨交叉支导线网方位角闭合、与施工控制导线的导线全长相对闭合差均达到隧道二等方位角闭合差(12.0″),导线全长相对闭合差1/100 000的限差要求,导线附合精度良好。隧道基本呈南北走向,CPⅡ导线与隧道建筑限界的横向差异在0.015 m左右,采用CPⅡ导线铺轨施工,轨道实地位置与隧道壁的相对关系满足隧道建筑限界要求。

表3 隧道出口端坐标方位角的闭合差检查表

表4 隧道出口端CPⅡ导线坐标闭合精度与建筑限界检查表
3.4 陀螺CPⅡ横向偏差与建筑限界匹配优化检查
考虑高精度陀螺仪测量的坐标方位角精度与CPⅡ支导线坐标方位角精度相当,可以当作同精度扩展。将陀螺边坐标方位角作为约束基准,方位角较差当作闭合差对待,在CPⅡ支导线平差观测值输入的in1文件中,对有陀螺方位边的测站观测值文件增加1行陀螺边照准方向,观测值类型为A,观测值直接输入陀螺坐标方位角,观测值的精度值输为0,利用科傻软件进行陀螺方位的约束平差。
用基于陀螺方位边约束的CPⅡ支导线平差结果,进行约束前后的建筑限界匹配检查。可以采用设计线条+联测施工导线点展点在CAD中手工量取,如图4所示。
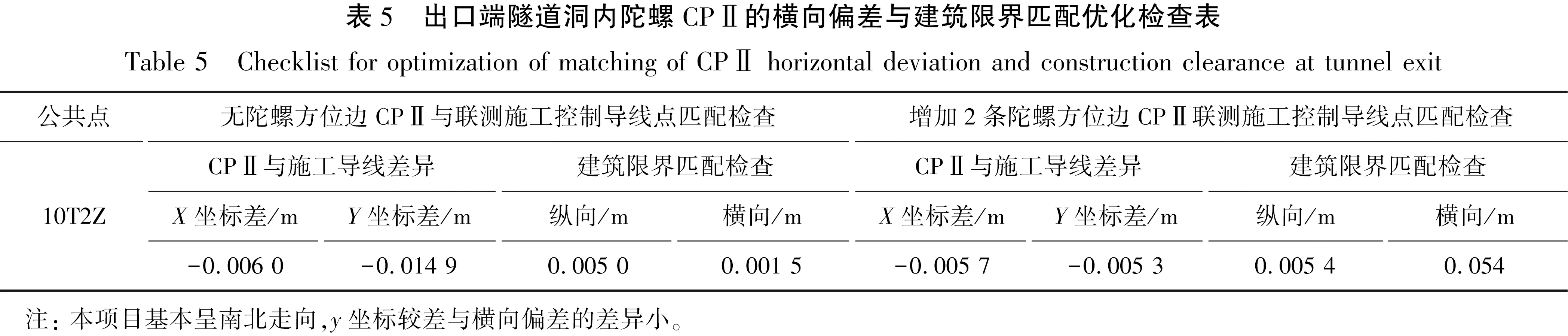
建筑限界匹配检查也可以按式(5)利用坐标较差FX、FY转换获取,检查结果见表5。
(5)
式中:FX、FY为联测施工在用支导线控制点的CPⅡ位置与原位置的坐标较差;α为设计理论中线前进方向的坐标方位角。
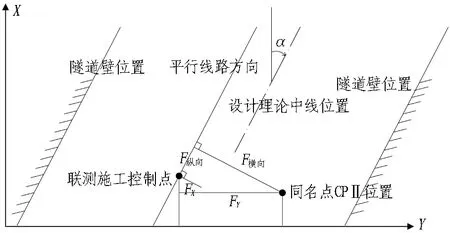
图4 隧道洞内CPⅡ导线与建筑限界匹配检查
从表5可以看出: CPⅡ支导线约束陀螺方位边后的导线与施工控制导线的坐标较差小,横向偏差得到优化,建筑限界匹配良好,采用出口平导方式的开挖掘进及铺轨施工可以采用陀螺方位约束方案。
综合以上分析,CPⅡ导线基于陀螺方位约束的应用条件应满足如下要求:
1) 公共边铺轨交叉支导线网坐标方位角与陀螺坐标方位角较差按间隔测站数计算,满足隧道二等方位角闭合差精度要求。
2) 需要联测隧道掘进施工控制导线点,与施工控制导线的导线全长相对闭合差应达到隧道二等精度的限差要求。
3) 铺轨交叉支导线网应先按严密平差计算,公共边导线坐标方位角精度应与陀螺坐标方位角精度相当。
4) 鉴于隧道已经衬砌完工地段工程结构的不可更改性,基于陀螺坐标方位角约束的CPⅡ导线与隧道建筑限界的匹配应得到优化;洞内CPⅡ中联测的施工导线点,其横向偏差应在隧道施工净空裕量范围内(5 cm)。
4 结论与讨论
本文通过CPⅡ导线加测陀螺方位的应用条件研究,引入支导线坐标方位角平差精度,以导线测站数评价2种坐标方位角较差的评价指标,得出CPⅡ交叉导线长度在7 km内的导线坐标方位角与陀螺坐标方位角精度相当、坐标方位角较差及导线全长相对闭合精度满足隧道二等限差要求、与隧道建筑限界的匹配应得到优化,且洞内CPⅡ中联测的施工导线点横向偏差在隧道施工净空裕量范围内(5 cm)的条件下,可以采用基于陀螺方位约束的CPⅡ导线平差方案的结论。隧道贯通竣工后铺轨的测量结果表明: 控制网的横向贯通误差仅0.8 mm,相向施工的无砟轨道可以准确对接,验证了采用基于陀螺方位约束的CPⅡ导线平差方案的必要性。
国内现有文献资料均没有涉及陀螺坐标方位角与隧道建筑限界的匹配方面的应用研究,尚难以进行陀螺坐标方位角的实际精度评价。本隧道洞内CPⅡ导线采用基于与隧道建筑限界匹配的陀螺方位约束方法,2020年10月,工务验收基本完成,轨道的平顺性和隧道建筑限界及其他各项指标满足工务验标要求,节约施工工期3个月,提前铺轨测量体系方法得到工程验证,表明本文提供的方法具有实践价值,以期为今后其他隧道工程和规范修订提供借鉴经验。
在洞内CPⅡ中应用陀螺坐标方位角约束,关键是要采用高精度的陀螺仪,下一步的研究课题是如何获取高精度的陀螺方位角,继续进行洞内CPⅡ中应用陀螺坐标方位角约束的工程验证,不断在实践中总结、完善陀螺方位角精度评价应用体系。完善陀螺方位角精度评价体系,建议施工单位做到以下2点:
1) 提供无震动、无干扰的测量环境,以便获取高精度的陀螺方位角。
2) 保证陀螺方位边公用控制点长久保存,后期CPⅡ导线的能够联测使用。