半挂牵引车悬架转向系统干涉模型及运动学分析*
2021-02-23劳孟潇张渤郝新刚侯嘉晖张瀚文陈泽宇
劳孟潇, 张渤, 郝新刚,2, 侯嘉晖, 张瀚文, 陈泽宇
(1.东北大学 机械工程与自动化学院车辆工程研究所, 辽宁 沈阳 110819;2.北汽福田汽车股份有限公司 工程研究总院, 北京 102200)
半挂牵引车是一种常见的由前置驱动车头与挂车组成的载货商用车辆,其悬挂系统多为后置转向梯形与纵置钢板弹簧结构,紧急制动时,由于钢板弹簧变形,转向传动机构与悬架系统极易发生干涉,致使车辆跑偏。针对转向系统与悬挂系统干涉问题,李玉明等建立悬架与转向系统空间模型,将转向节臂球销中心随悬架的跳动与转向直拉杆末端绕转向摇臂球销中心的运动置于同一平面分析干涉问题;古玉峰等提出空间模型对悬架跳动所致的干涉进行了讨论。该文基于悬架转向空间模型,引入悬架纵扭量,分析干涉产生的原因,进而利用现有车型对悬架跳动和纵扭所致的转向系统杆件的运动轨迹进行建模,得到转向系杆件在紧急制动时的运动学轨迹,通过仿真分析关键部件的结构尺寸对跑偏结果的影响并探讨减小制动跑偏的设计方法。
1 干涉机理分析
半挂牵引车制动时,前轴载荷增加,导致悬架被压缩,由于钢板弹簧前端是固定端,后端是游离端,钢板弹簧安装点向半挂牵引车后上方摆动,并带动前桥与转向节臂以相同轨迹运动,采用圆弧近似算法(简称SAE圆弧)加以描述,结果见图1(a)实线轨迹。由于转向直拉杆长度不变,转向节臂通过球销与转向直拉杆相连,转向节臂球销中心必然做以转向摇臂球销中心为圆心、转向直拉杆长度为半径的球面运动[见图1(a)中虚线轨迹]。这两种运动轨迹不完全重合,转向节将绕主销偏转一定角度,使转向节臂固定端依然为虚线轨迹,转向节臂球销中心为实线轨迹,从而导致车轮偏转,发生制动跑偏。而且随着半挂牵引车制动强度的不断增加,两种轨迹在空间中的距离越来越远,干涉越来越严重。
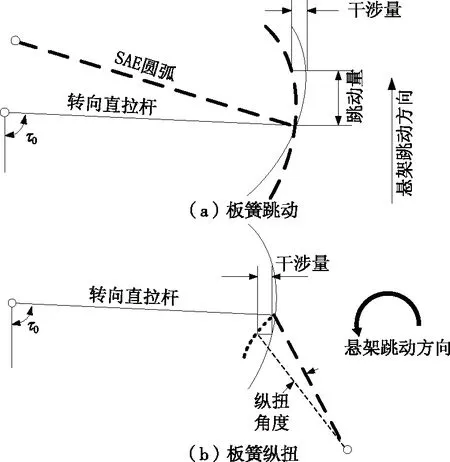
图1 板簧跳动与纵扭所致干涉原理示意图
紧急制动时,板簧同时会受到一个制动力矩的作用,产生S形变形,使前桥向前扭转一个角度。转向节臂本应随前桥扭转产生相应移动[见图1(b)虚线轨迹],但由于转向节臂与直拉杆相连,转向直拉杆长度不变,从而使转向节臂产生相对于主销的转动,这是引起转向轮转动与汽车跑偏的重要原因。
2 干涉问题的数学模型
基于上述分析建立悬架转向系统干涉模型。以转向摇臂固定端为坐标原点A、车辆行进方向为X轴正方向、车的左侧为Y轴正方向、垂直于地面向上为Z轴正方向建立空间坐标系,得到空间几何模型(见图2)。
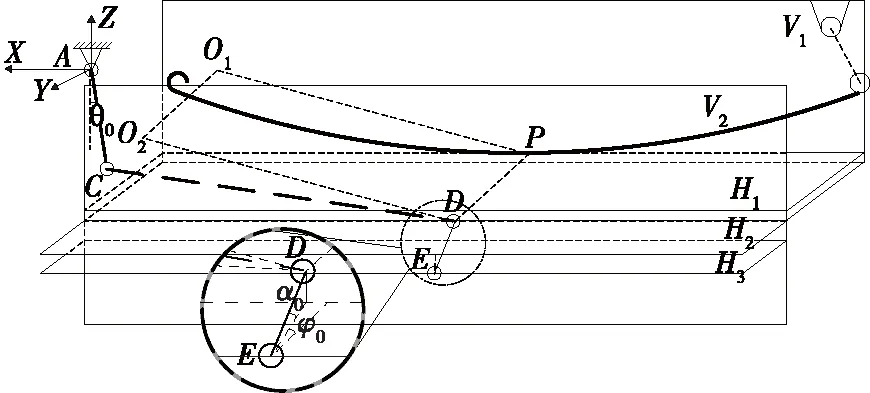
C为转向摇臂球销中心;P为钢板弹簧第一片安装点;O1为P点对应的SAE圆弧圆心;E为转向节臂固定端;D为转向节臂球销中心;O2为D点对应的SAE圆弧圆心;V1为钢板弹簧纵截面;V2为过D点与V1平行的平面;H1为过P点与V1垂直的平面;H2为过D点与H1平行的平面;H3为过E点与H1平行的平面
由于板簧跳动导致的干涉与板簧纵扭导致的干涉互不影响,将两种干涉的具体过程分开建模。两种干涉的产生均是由于转向节臂球销中心随板簧变形的运动轨迹与绕转向摇臂球销中心转动的运动轨迹不重合。为区分上述两种运动轨迹,在两种干涉的建模过程中以转向节臂球销中心的坐标来表示随板簧变形的运动轨迹,以转向直拉杆末端坐标来表示绕转向摇臂球销中心的运动轨迹,而在制动过程中,随着制动强度的变化,上述两点的坐标也相应发生变化。
2.1 板簧跳动轨迹运动学模型
转向节臂球销中心随板簧跳动的运动轨迹方程如下:
(1)
将制动强度为z时的悬架跳动量代入式(1),即可求得该制动强度下转向节臂球销中心坐标I(xI,yI,zI)。
转向直拉杆末端绕转向摇臂球销中心转动的球面轨迹为:
(x-xC)2+(y-yC)2+(z-zC)2=
(xD-xC)2+(yD-yC)2+(zD-zC)2
(2)
将制动强度为z时的悬架跳动量代入式(2),即可求得该制动强度下转向直拉杆末端绕转向摇臂球销中心运动的圆弧轨迹:
(x-xC)2+(y-yc)2=(xD-xC)2+
(yD-yC)2+(zD-zC)2-(zD+
ΔFz/(2k)-zC)2
(3)
式中:ΔFz/(2k)为悬架跳动量。
转向直拉杆末端在该制动强度下绕转向节臂固定端转动的圆弧轨迹为:
(4)
式中:E′点为转向直拉杆末端;J为转向节臂长;α为转向节臂水平转角。
联立式(3)、式(4),即可求得制动强度z下转向直拉杆末端坐标U(xU,yU,zU)。
2.2 板簧纵扭轨迹运动学模型
设制动强度z下板簧的纵扭转角为β,此时转向节臂固定端坐标为:
(5)
式中:N为转向节臂固定端距其纵扭旋转中心的距离;E″点为纵扭后转向节臂固定端。
(6)
式中:φ为转向节臂垂向转角。
转向直拉杆末端在制动强度z下绕转向节臂固定端转动的圆弧轨迹为:
(7)

3 运动学分析
基于上述干涉模型,对该车转向直拉杆末端及转向节臂球销中心进行运动学仿真,探究结构干涉引发半挂牵引车跑偏问题的特征及影响规律。仿真时设置制动强度为0~0.5,车辆转向系统各部件尺寸见表1。
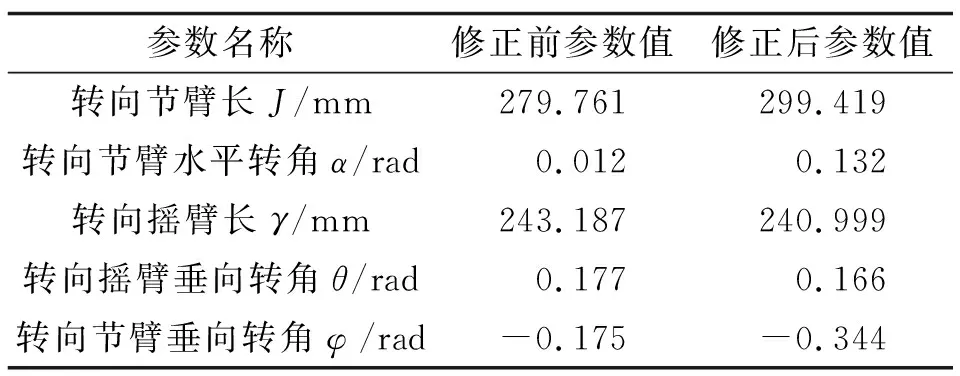
表1 仿真参数设置
3.1 板簧跳动轨迹
通过仿真分析得到悬架跳动单独作用下转向直拉杆末端及转向节臂球销中心的三维轨迹,同时发现系统结构的修正有益于降低干涉量,从而减轻制动时的跑偏程度。
如图3(a)所示,结构位置修正前,在汽车悬架跳动的单独作用下,转向直拉杆末端运动轨迹在转向节臂球销中心的前方;在板簧跳动单独作用下,转向节臂球销中心趋向转向直拉杆末端,即图中虚线向实线方向移动。最终导致车轮向左偏转一定角度,呈现悬架跳动所导致的半挂牵引车制动向左跑偏的现象。
如图3(b)所示,对结构位置进行修正后,悬架跳动时,转向直拉杆末端运动轨迹在转向节臂球销中心轨迹的后方,在相同条件下,半挂牵引车在制动时会出现向右偏转的现象,但干涉量有所下降,说明对系统结构进行优化设计可很大程度上改善制动稳定性。不过这里并未开展具体的优化设计,而是将重点放在建模与运动学分析,后续研究中将进一步进行半挂牵引车悬挂转向系统的结构优化设计。
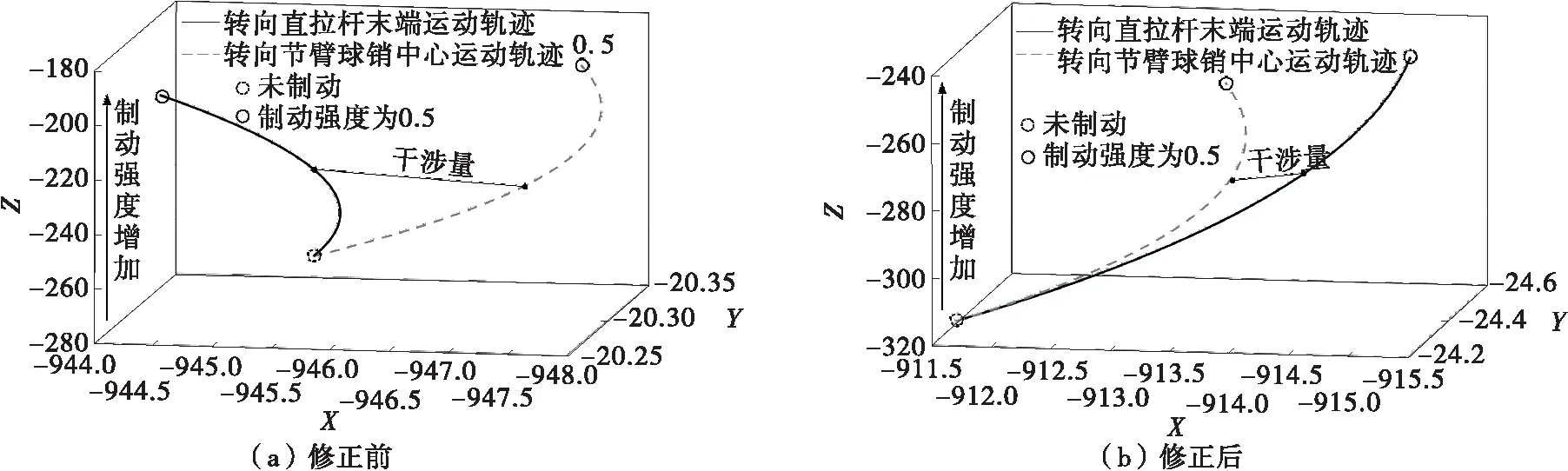
图3 板簧跳动所致转向直拉杆末端和转向节臂球销中心的运动轨迹
3.2 板簧纵扭轨迹
图4为悬架纵扭单独作用下转向直拉杆末端及转向节臂球销中心的三维轨迹。
如图4(a)所示,结构位置修正前,在悬架纵扭单独作用下,转向直拉杆末端运动轨迹在转向节臂球销中心的后方,转向节臂绕主销向车后方扭转,导致车轮向右偏转。
如图4(b)所示,对结构位置进行修正后,转向节臂的尺寸发生变化。在悬架纵扭单独作用下,转向节臂球销中心在板簧纵扭时向车的后下方移动,而转向直拉杆末端运动轨迹在其前方,半挂牵引车在制动时会出现向左偏转的运动特性。
图4 板簧纵扭所致转向直拉杆末端和转向节臂球销中心的运动轨迹
3.3 修正前后运动学分析
对比修正前后在悬架跳动和纵扭条件下转向直拉杆末端、转向节臂球销中心的运动轨迹,可知:受悬架跳动的影响,修正前制动跑偏方向为向左跑偏,修正后为向右跑偏;悬架纵扭则相反,修正前制动跑偏方向为向右,修正后为向左。造成这种现象的原因是转向节臂垂向转角发生了较大改动,通过对该角度的修正,转向节臂球销中心降低。如图5所示,转向节臂球销中心D与转向直拉杆CD相连,转向直拉杆与地面垂线之间的夹角τ会有减小趋势。
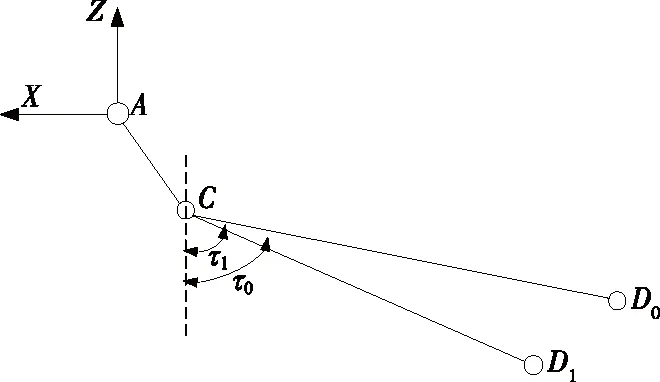
图5 转向直拉杆修正前后空间位置示意图
悬架后跳时,转向直拉杆末端做以转向摇臂球销中心为圆心的上摆运动,会相对于转向摇臂固定点后移[见图1(a)],直拉杆末端移动距离比悬架跳动带动的转向节臂球销中心后移的距离小。因此,转向直拉杆末端在前,转向节臂球销中心在后,转向节绕主销偏转一定角度,使转向节臂球销中心尽量与转向直拉杆末端重合,最终导致车轮向左偏转。
由于修正后的τ1比修正前的τ0小,在相同悬架跳动量下,直拉杆末端后移的距离更大,甚至大于悬架跳动后摆所带动的转向节臂球销的移动距离[见图6(a)]。此时,转向直拉杆末端在前,转向节臂球销中心在后,转向节绕主销偏转一定角度,车轮向右偏转。悬架纵扭的情况则相反,纵扭导致转向直拉杆末端做以转向摇臂球销中心为圆心的下摆运动,会相对于转向摇臂固定点向车前方移动。由于修正后的τ1比修正前的τ0小,相同制动强度下,其向车前方移动的距离更远,甚至大于悬架纵扭带动的转向节臂球销中心前移的距离[见图6(b)]。
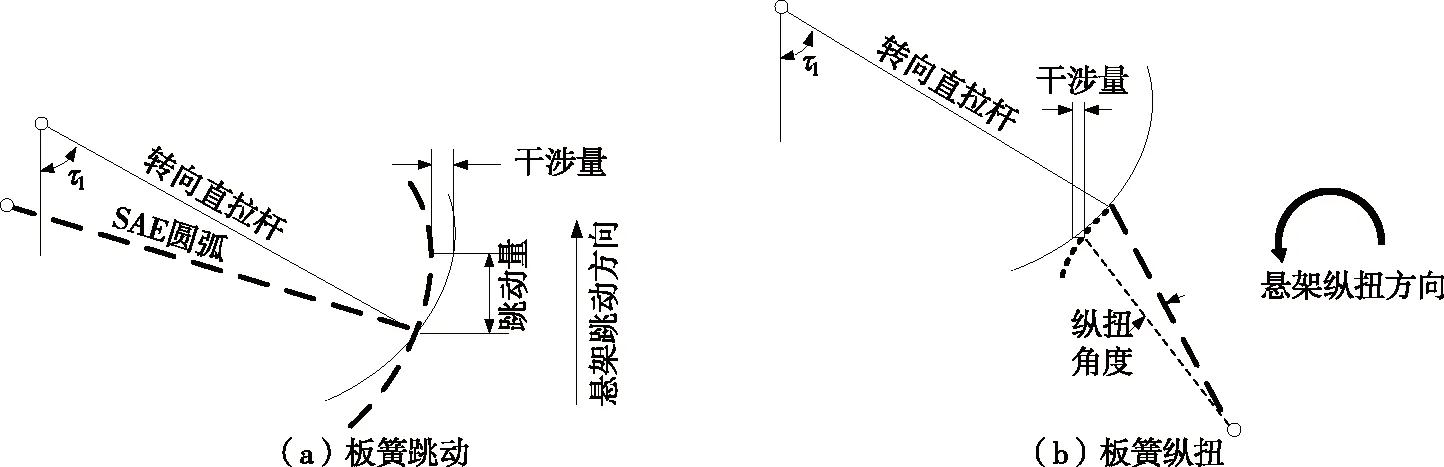
图6 修正后板簧跳动与纵扭所致干涉示意图
4 结语
半挂牵引车制动跑偏问题可总结为转向直拉杆绕转向摇臂球销中心的摆动轨迹与悬架跳动纵扭带动转向节臂球销中心的运动轨迹之间的干涉问题。文中从运动学角度分析半挂牵引车制动跑偏问题的原因,通过对悬架转向系统进行三维空间建模,阐述板簧跳动与板簧扭动产生干涉的机理,通过仿真得出修正前后由板簧变形造成的转向直拉杆和转向节臂球销中心的空间运动轨迹,直观地揭示干涉的产生及跑偏的原因。仿真结果表明转向直拉杆与地面垂线之间的夹角τ是两个轨迹干涉的关键,通过改变转向节臂垂向转角使τ角减小,可使制动跑偏问题得到改善。
