基于机械臂的颈椎前路手术机器人系统
2021-02-22张铭杰史建刚吴炳坚孙璟川
张铭杰 叶 震 史建刚 吴炳坚 吕 燕 孙璟川
1.上海电气集团股份有限公司 中央研究院 上海 200070 2.上海长征医院 上海 200003
1 研究背景
伴随着全球人口老龄化趋势,颈椎疾病的发病率逐年提高。颈椎对中枢神经系统有重要保护作用,颈椎手术被认为是难度最高的外科手术之一[1]。在颈椎手术中,颈椎前路手术从颈部前方进行手术,是针对颈椎病的最常见手术方式,手术效果如图1所示。

▲图1 颈椎前路手术效果
颈椎前路手术入路简便,暴露良好,出血少,创伤小,可以直接减压来自椎管前方的致压物,植骨融合率高,椎间高度维持好,能较好地恢复颈椎的生理曲度。由于技术难度较高,颈椎前路手术年均手术量较少,且目前国内大多数医师均采用手工手术方式。手工手术方式很难保证操作位置和方向,长时间手术操作所带来的精力耗费及手的生理颤抖都增加了手术误操作的可能性[2]。随着计算机技术及多专业融合技术的发展,图像导航技术与机器人系统越来越多地运用在脊柱内固定手术中[3]。目前,临床应用较多的脊柱手术机器人包括以色列的Renaissance、法国的ROSA、美国的Hugo RAS[4],以及国内的天玑机器人等。通过对比国内外脊柱手术机器人系统的特点[5],发现还没有针对颈椎前路手术的专用手术机器人。
针对临床需求,笔者基于机械臂设计了一种颈椎前路手术机器人系统,采用球形磨钻工具,借助光学导航定位技术、电子计算机断层扫描三维重构技术、操作软件,帮助医师解决临床难题,提高手术效率和精度,减小手术创伤。
2 颈椎前路手术临床痛点
颈椎前路手术难度较高,手术中每一个步骤都十分关键,对医师的技术要求也较高。医师在进行手工颈椎前路手术时,会出现四方面临床痛点。
(1) 医师在操作过程中必须谨慎,因为颈部有大量重要血管神经,要保护好这些血管神经不受损伤,然后再进行颈椎间盘或椎体的切除,切除后再进行对应的植骨和内固定治疗。
(2) 手工手术时间较长,精力耗费及手颤抖等生理因素会导致医师在进行颈椎间盘及锥体切除时碰到周围的血管神经,从而导致病患相应功能失调甚至永久残疾。
(3) 手术中需要对患处进行磨削,传统的手工手术基于肉眼观察,为了提高手术精度,需要多次使用X光机反复观察,消耗时间较长,所受辐射严重,并且不能保证手术结果令人满意。
(4) 目前市面上没有针对颈椎前路手术的专用手术机器人及磨钻工具,市面上常见的手术机器人主要是面向脊柱疾病的通用机器人,用于进行颈椎前路手术不能达到令人满意的效果。
3 颈椎前路手术机器人系统结构
颈椎前路手术机器人系统如图2所示,能够解决上述颈椎前路手术临床痛点。在颈椎前路手术机器人系统中,具备亚毫米级光学导航功能,三维骨骼图像可以使医师在术前进行更为直观、快捷、有效的规划。

▲图2 颈椎前路手术机器人系统
颈椎前路手术机器人系统子模块如图3所示。
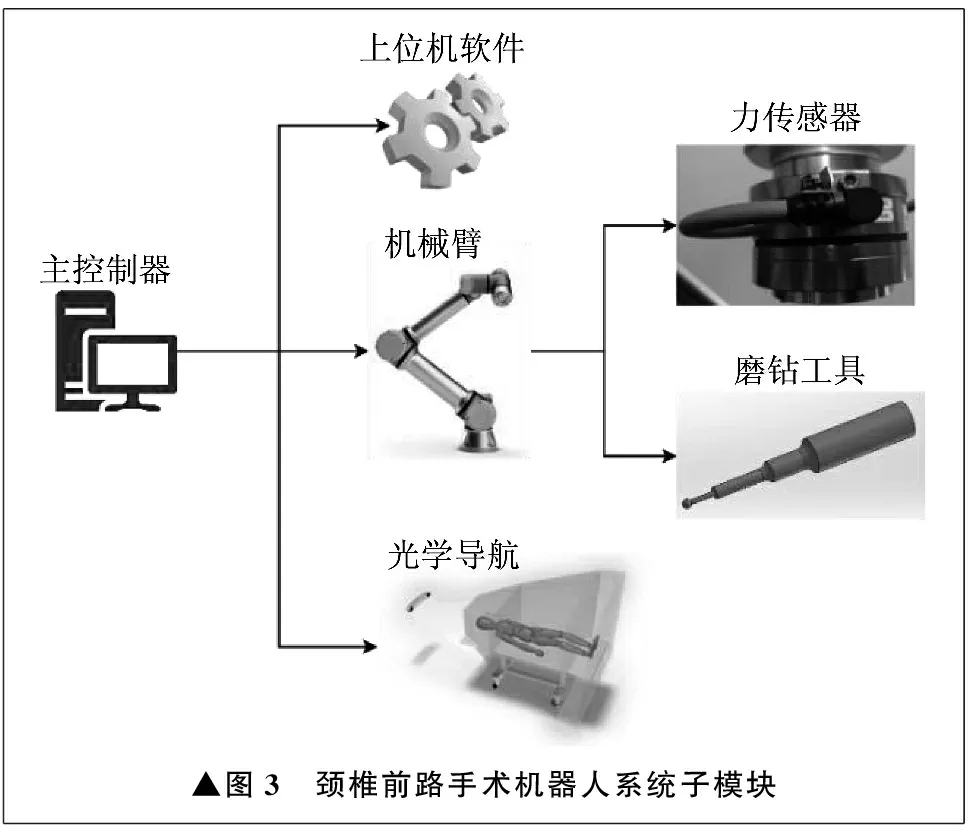
▲图3 颈椎前路手术机器人系统子模块
计算机主控制器选用高性能服务器,配置图形处理器显卡,使用深度学习算法,可以对大量电子计算机断层扫描数据经行快速分割,获得颈椎三维模型。
颈椎前路手术机器人系统使用多轴机械臂、力传感器和磨钻工具,代替医师手工进行手术。光学导航用于对患者颈椎进行影像配准,引导机械臂至手术区。
以光学导航坐标系建立高精准虚拟夹具区间,使手术更为安全。
4 颈椎术中影像定位匹配系统
颈椎术中影像定位匹配系统是一套辅助医师在颈椎前路手术中实时获取机械臂末端器械和颈椎相对位置的可视化智能辅助系统,通过软件编程实现二维图像处理、深度学习算法、三维图像重构、前端开发等。
颈椎术中影像定位匹配系统操作过程如图4所示。A为导入的基于电子计算机断层扫描影像重建的颈椎三维模型,B为使用光学导航对笛卡尔坐标系中的颈椎骨进行采集,C为将虚拟颈椎三维模型与实际物理世界颈椎配准,建立映射关系,D为医师在配准完成后进行手术规划,E为对磨钻工具进行手眼标定,F为在人机系统中实时显示磨钻位置。
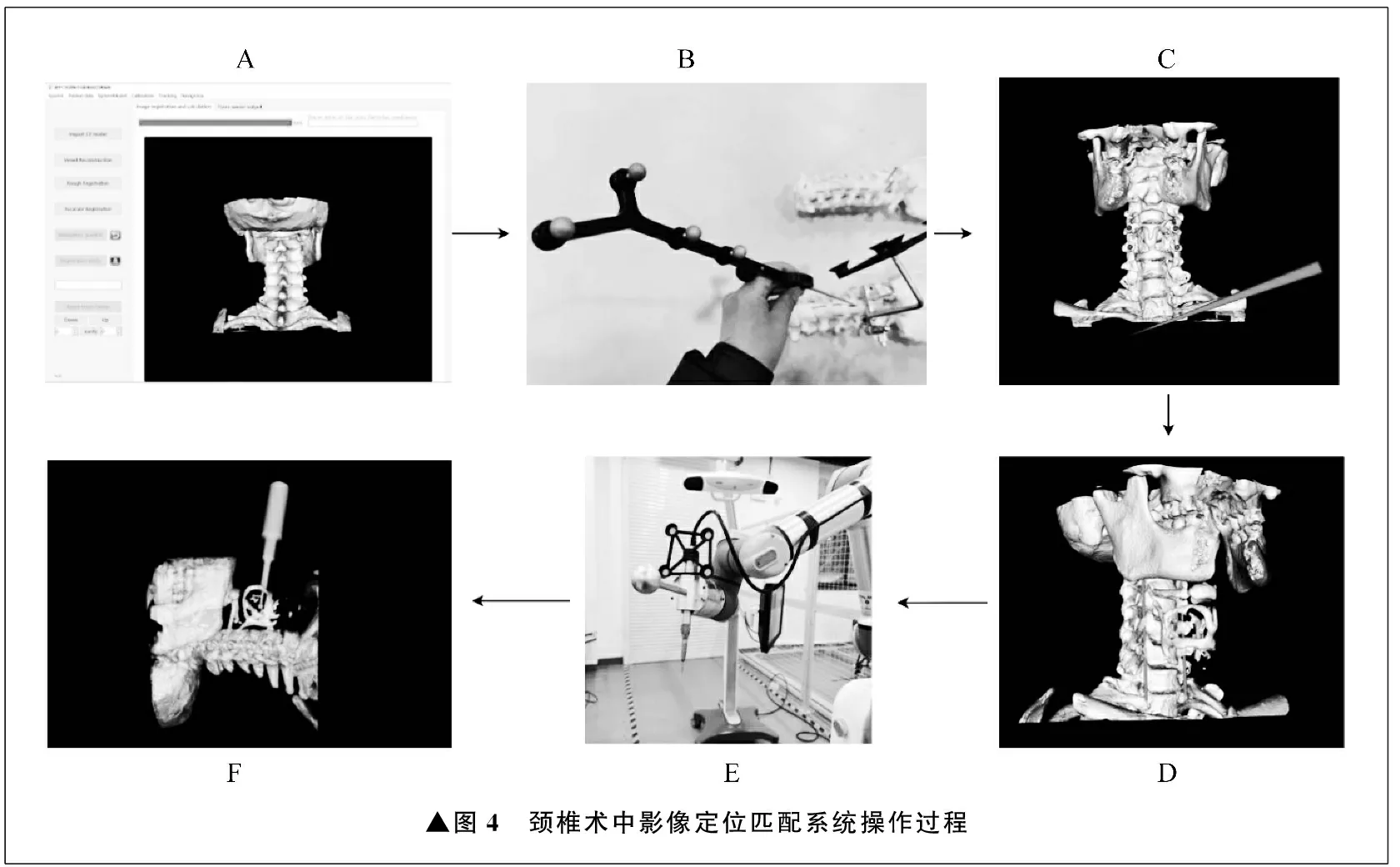
▲图4 颈椎术中影像定位匹配系统操作过程
5 磨钻工具与机械臂、光学导航的标定
磨钻工具安装在机械臂上,要使机械臂控制磨钻工具实现所规划的路径姿态变换,需要对磨钻工具进行标定,建立以磨钻工具为中心,相对于机械臂基座的坐标系。
磨钻工具的标定分为位置标定和姿态标定,前者需要计算出磨钻工具相对于机械臂法兰盘的位置偏移量,后者需要标定磨钻工具的空间姿态。通过机械臂示教不同姿态,读取笛卡尔坐标,再经过一系列矩阵方程推导,即可标定出磨钻工具相对于机械臂法兰盘的位姿。在建立磨钻工具与机械臂的标定方程后,还需要求解机械臂与光学导航的手眼标定关系矩阵,这样才能使光学导航引导磨钻工具至手术区域,并在人机界面上实时显示位姿。
5.1 位置标定
在机械臂运动空间内选择一个固定参考点,移动机械臂以四种不同的姿态重合于这一固定参考点,如图5所示。分别记录机械臂末端参数x、y、z、rx、ry、rz。对rx、ry、rz进行罗德里格斯矩阵转换,与x、y、z组成四组齐次方程。
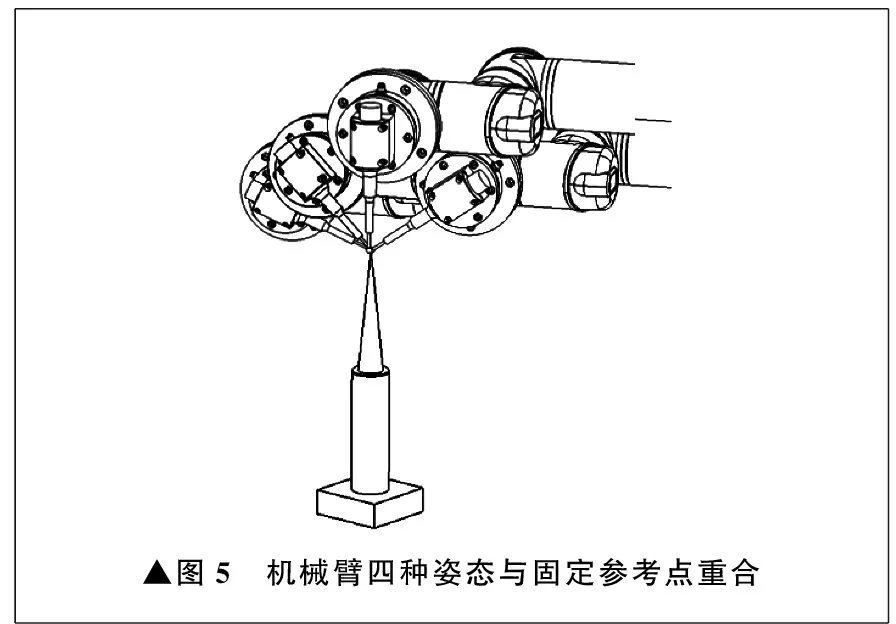
▲图5 机械臂四种姿态与固定参考点重合
(1)
式中:RBFi为机械臂基坐标系至机械臂法兰盘坐标系的旋转矩阵;PBFi为机械臂基坐标系至机械臂法兰盘坐标系的位置矢量;RFTi为机械臂法兰盘坐标系至工具末端坐标系的旋转矩阵;PFTi为机械臂法兰盘坐标系至工具末端坐标系的位置矢量;RTB为工具末端坐标系至机械臂法兰盘坐标系的旋转矩阵;PTCP为工具末端坐标系至机械臂法兰盘坐标系的位置矢量。
由于四种姿态下机械臂末端的位置不变,因此式(1)等号右侧的PTCP相等。将四组齐次方程等号左侧的参数改写为矩阵形式,满足矩阵的秩不小于3,使用最小二乘法即可求解出RFTi和PFTi。
5.2 姿态标定
姿态标定时,机械臂将磨钻工具竖直指向参考平面,如图6所示。参考平面的坐标方向为机械臂基座坐标方向。写入当前机械臂笛卡尔坐标,计算与法兰盘之间的方向矢量,即可标定出Z方向。磨钻工具的X方向、Y方向即为参考平面的X方向、Y方向。
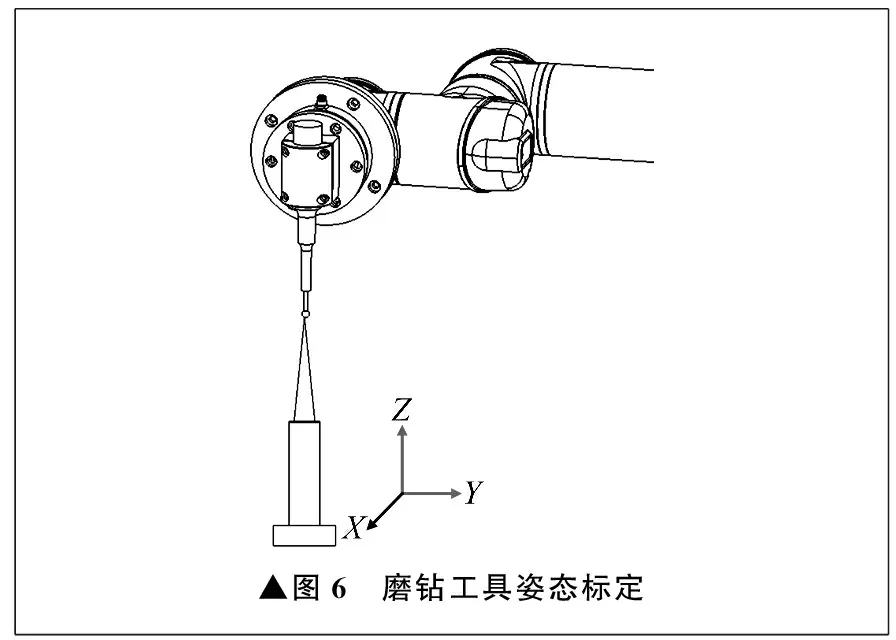
▲图6 磨钻工具姿态标定
5.3 机械臂与光学导航手眼标定
在颈椎前路手术机器人系统中,机械臂、磨钻工具、光学导航之间的关系为手眼标定中的“眼在外”模式。手眼标定方程为[6]:
AX=XB
(2)
式中:A为机械臂与光学导航的相对运动;B为末端标定板的相对运动;X为待求的光学导航至末端执行器的变换矩阵。
笔者使用四元数数学工具[7],求出机械臂与光学导航之间的关系。这一方法的优点在于不需要对旋转矩阵和平移矢量进行解耦,精度高,鲁棒性强。
6 机械臂柔顺控制技术
医师在进行颈椎前路手术时,将机械臂工具端拖拽至手术区域,或者手工调整磨钻工具角度,希望拖拽的效果如同握笔一般流畅,进而保证手术效果。传统工业机械臂柔顺控制技术为安装力传感器,建立速度与力的数学模型,对数据进行余弦拟合,推导速度和加速度曲线公式。这种方法建立的柔顺控制数学模型虽然能够使机械臂沿所需要的方向快速运动,但是存在机械臂抖动、工具端与硬物接触后反弹等问题,在医疗行业并不适用。
笔者建立力与位置数学模型结构,选用高精度六维力传感器,由此使颈椎前路手术机器人系统可以对外部力或者影响做出反应。
机械臂力控模型如图7所示,主要由虚拟弹簧和减振器构成。模型所受力与位置偏移量的关系符合胡克定律:
F=Cx1+K
(3)
式中:F为力传感器所测得的力;C为弹簧弹性系数,用于控制刚度;x1为机械臂产生的位移;K为阻尼系数,用于设计减振器。
采用笔者控制方案,在多次试验中机械臂均无抖动,磨钻工具末端碰到颈椎骨后无反弹,效果良好。
7 试验分析
采用颈椎前路手术机器人系统对颈椎全段模型骨进行磨钻试验,如图8所示。试验时,通过光学定位设备对手术精度进行测试。
试验数据表明,颈椎全段模型骨磨钻精度误差控制在1 mm以内,保证了颈椎前路手术机器人系统的手术精度。试验精度误差曲线如图9所示。
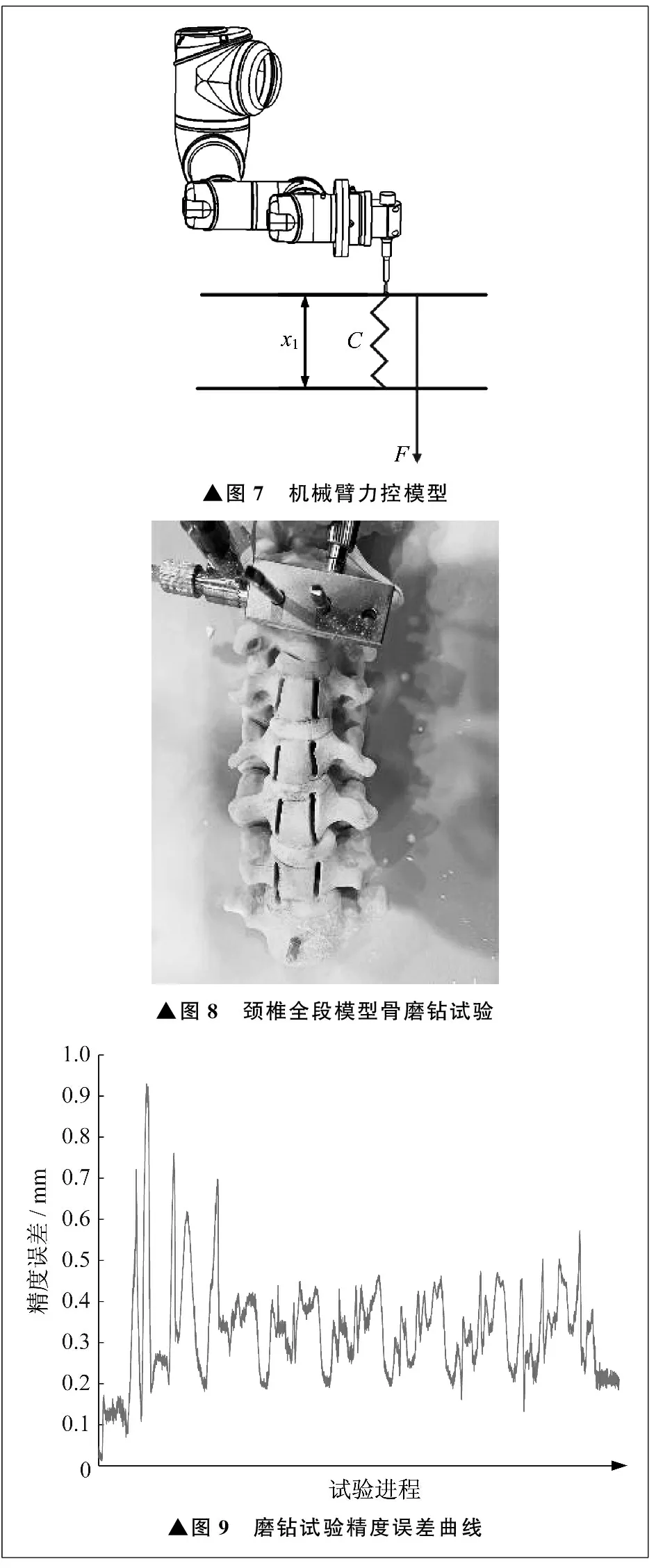
▲图7 机械臂力控模型▲图8 颈椎全段模型骨磨钻试验▲图9 磨钻试验精度误差曲线
8 结束语
笔者基于机械臂设计了颈椎前路手术机器人系统,具有磨钻工具精度高、机械臂拖拽手感顺畅等优点。目前,还未见针对颈椎前路手术的专用手术机器人的报道,这一颈椎前路手术机器人系统具有良好的市场前景。应用这一颈椎前路手术机器人系统,还有助于年轻临床医师对颈椎前路手术进行学习。
