汽车追尾事故的仿真分析
2021-02-22胡瑞海
胡瑞海
江苏联合职业技术学院常州刘国钧分院 江苏常州 213025
1 分析背景
随着我国道路行驶车辆的日益增多,汽车追尾事故发生数量逐年增加。汽车追尾事故虽然没有正面撞击、侧面撞击和侧翻事故的危害性大,但是发生率却仅次于正面撞击和侧面撞击。据交通运输部数据统计,汽车追尾事故在所有交通事故中比例高达30%以上,在高速公路发生的交通事故中,汽车追尾事故的数量占首位。笔者以LS-DYNA软件仿真技术为基础,结合CATIA三维建模软件,建立东风本田系列汽车追尾几何模型和有限元模型,同时建立一个可移动的用于碰撞的小车模型,对汽车追尾事故进行仿真分析。在分析时,对碰撞小车模型赋予一定初速度,用于对汽车进行追尾碰撞,研究道路行驶汽车的安全距离及制动过程中各项因素对制动减速度的影响。
2 有限元建模
依据上海市机动车检测中心汽车碰撞试验实际可移动小车的尺寸,对碰撞小车进行三维建模。碰撞小车前端碰撞面的尺寸为3 000 mm×900 mm×50 mm,其下端离地高度与汽车底盘离地高度相当,为250 mm,碰撞小车的质量为1 200 kg,主体由方钢拼焊而成。碰撞小车几何模型经过前处理和网格划分之后,共划分为5 945个壳单元网格和5 839个节点。碰撞小车有限元模型如图1所示。
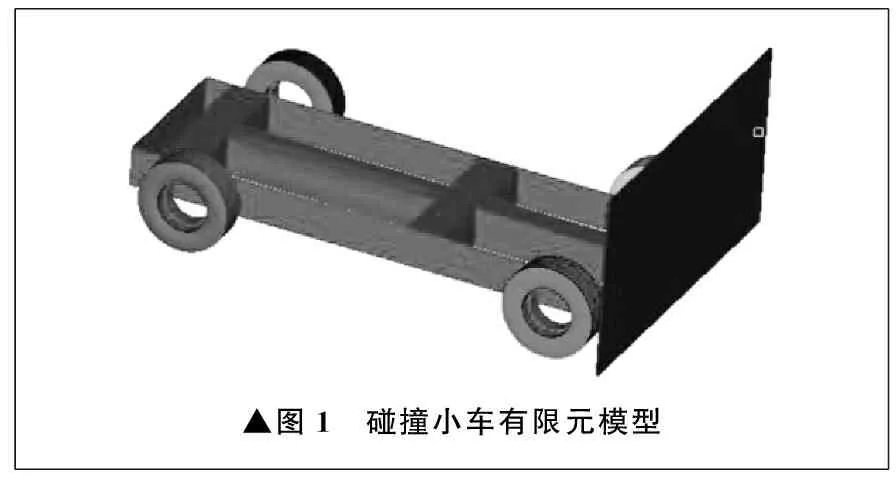
▲图1 碰撞小车有限元模型
分析的主体是被追尾的汽车,因此碰撞小车在碰撞仿真时不产生变形,网格材料设置为刚体。碰撞小车主体由方钢构成,采用壳网格划分,碰撞平面厚度较厚,采用体网格划分。壳网格的材料在LS-DYNA软件中选用MATL20,密度为7.89 g/cm3,弹性模量为200 GPa,泊松比为0.3。
分析采用的被追尾汽车模型以东风本田汽车为基础,在建立三维模型,进行网格划分等操作后,生成有限元模型。被追尾汽车主体主要由钣金件构成,同样也采用壳网格进行划分。被追尾汽车中的一些零部件,如发动机、减速器等,采用刚性体网格进行划分。体单元与壳单元不能直接发生接触碰撞,因此在碰撞小车的前部体单元外部附加一层壳单元,将其与被追尾汽车的壳单元设置为面面接触。如果不设置面面接触,那么碰撞小车将直接穿过被追尾汽车,不会使汽车产生变形。被追尾汽车有限元模型如图2所示。
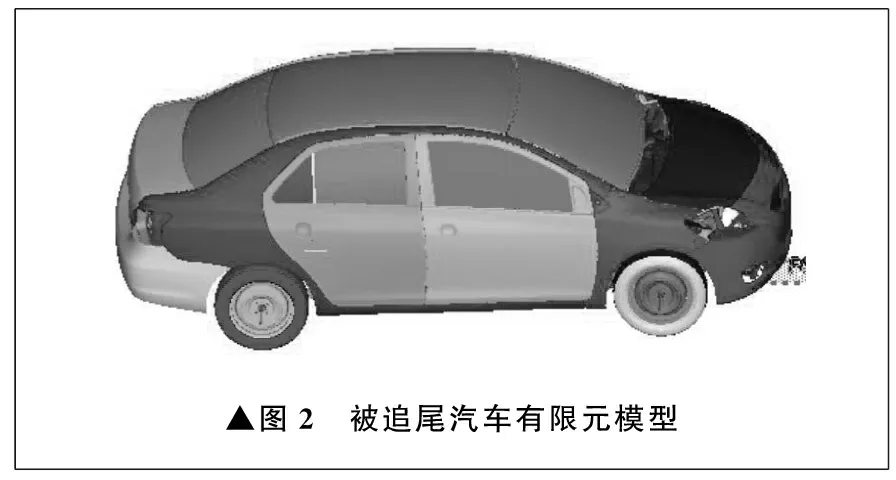
▲图2 被追尾汽车有限元模型
3 仿真结果
采用LS-DYNA软件对有限元模型进行求解,赋予碰撞小车30 km/h初速度产生追尾,对不同尾部质量、不同碰撞时间的被追尾汽车进行仿真,仿真结果如图3所示。
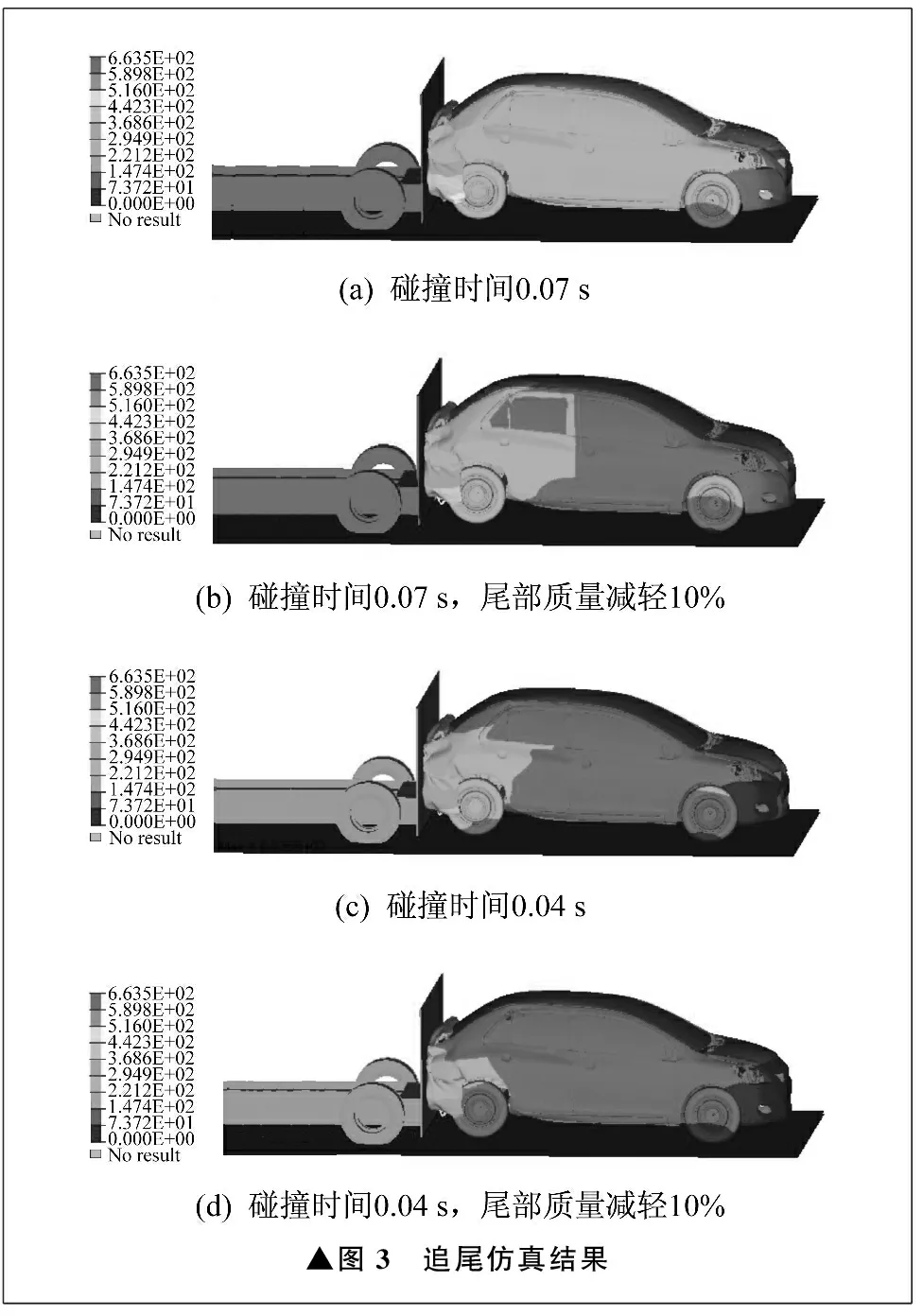
▲图3 追尾仿真结果
对被追尾汽车进行位移约束,则碰撞小车和被追尾汽车的相对速度为30 km/h,符合实际情况。碰撞时间为0.07 s时,被追尾汽车整个车身乃至车头都产生至少200 mm的变形。车尾质量减轻10%后,被追尾汽车只有车尾和车身后半部分产生严重变形,车头和车身前半部分的变形较小。碰撞时间为0.04 s时,仿真结果与碰撞时间为0.07 s时类似。
通过仿真发现,减轻汽车尾部质量之后,在相同的碰撞时间下,汽车尾部乃至汽车全身的变形量小于没有减轻汽车尾部质量时。
4 汽车制动分析
4.1 制动过程
汽车制动过程一般分为四个阶段:驾驶员反应阶段、制动器协调阶段、减速度产生阶段、减速度持续增大阶段。
(1) 驾驶员反应阶段。当驾驶员看到行驶前方有障碍物时,眼睛捕获的图像刺激视网膜,传输至大脑中枢神经系统。大脑发出指令至右脚神经系统,右脚从油门踏板移动到制动踏板并踩下。
(2) 制动器协调阶段。驾驶员踩下制动踏板后,制动摩擦片逐步贴合制动盘,这一阶段并没有产生减速度,汽车的速度仍为原始速度。
(3) 减速度产生阶段。这一阶段摩擦片已经贴合制动盘,汽车产生相应的减速度,汽车开始减速运动。
(4) 减速度持续增大阶段。汽车的发动机以恒功率减速时会产生最大减速度,当汽车达到最大减速度后,将基于该减速度作匀减速运动,直至停车。
4.2 制动减速度
汽车制动减速度由汽车轮胎与地面的摩擦因数、汽车的总质量,以及摩擦片与制动盘的制动效率决定。使用软件编程,将地面路况、车辆初速度、反应时间、路面摩擦因数等条件代入计算,可以得到不同路况下相邻行驶汽车之间的安全距离。在使用软件进行编程时,可以改变其中某个参数,将其它参数定义为常量,进行多次仿真试验,确定每个参数对追尾事故发生概率的影响。
追尾的初速度以高速行驶的汽车车速来确定,一般在90 km/h~120 km/h之间,每次仿真以2 km/h的增量递增。路面摩擦因数与路面的类型和天气状况有关,一般范围为0.35~0.6,干燥路面的摩擦因数远高于潮湿泥泞路面。驾驶员的反应时间根据人体平均反应时间来确定,一般取0.3~1.0 s。假设两车的初速度之差相等,两车的间距设置为6 m,在相关参数确定之后,将两车设定在一条直线上行驶,进行仿真。仿真结果为,汽车制动减速度与地面路况有关,其它参数不变时,路面摩擦因数越大,汽车制动减速度越大。当遇到突发情况时,前车先做出减速制动的反应,后车看到前车的制动后,再做出制动反应,两者存在一定的时间差。假设两车在行驶时的速度是相等的,如果两车之间的距离小于汽车在制动过程中行驶的距离,那么就会发生追尾事故。
5 尾部吸能装置的应用
一些汽车的尾部在设计生产时会有一个吸能装置,吸能装置的仿真变形如图4所示。在汽车发生追尾事故时,吸能装置变形,吸收了碰撞中产生的大部分能量,可以减小汽车尾部的变形,从而提高汽车的安全性。汽车尾部吸能装置的碰撞仿真如图5所示。由图5和图3对比可知,在相同的条件下,汽车车尾及车身的变形大幅减小,证明了尾部吸能装置对汽车追尾事故安全性的提升作用。
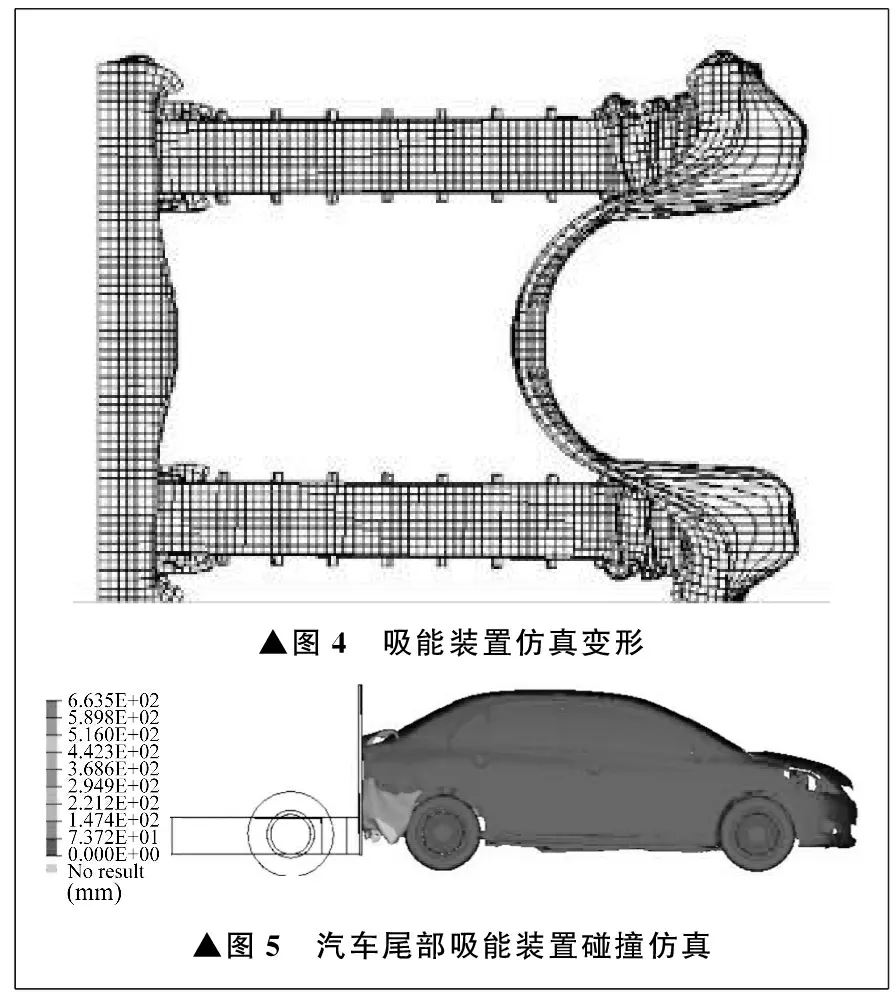
▲图4 吸能装置仿真变形▲图5 汽车尾部吸能装置碰撞仿真
6 结束语
笔者采用CATIA软件进行汽车几何建模,通过网格划分及边界条件设置,得到有限元模型,然后使用LS-DYNA软件进行有限元仿真分析。通过更改汽车有限元模型的车尾质量和碰撞时间,进行多次追尾仿真,分析汽车轻量化对避免汽车追尾事故,提升安全性的作用。
依据汽车制动的四个阶段,使用软件编程,计算不同路况下相邻汽车之间的安全距离,以降低追尾事故的发生概率。
在汽车尾部安装吸能装置,通过吸收汽车发生追尾时产生的能量,减小汽车的变形,从而避免对乘员造成伤害。
