基于MOS管的箭载时序控制器设计与实现
2021-02-22江良伟季海波
江良伟,季海波
(1.北京星际荣耀空间科技有限公司,北京 100176; 2.北京理工大学 机电学院,北京 100081)
0 引言
运载火箭控制系统一般由导航与制导系统、姿态控制系统、时序控制系统和供配电系统组成[1]。其中时序控制系统在运载火箭飞行过程中执行如各级发动机点火、级间分离、整流罩分离、星箭分离等多项时序输出关键动作,控制对象包括了运载火箭的所有分系统。若火箭的时序控制系统失效,一般将直接造成整个飞行任务的失败,甚至危及发射场和参试人员的安全。
针对新一代运载火箭控制系统架构[2-3]及民营商业运载火箭快响应、低成本、高可靠的要求,对集成化、智能化、快速测试的箭载时序控制器的需求越来越紧迫。时序控制器[4-5]作为运载火箭上的控制设备,在火箭发射前,一方面要完成箭上火工品和电磁阀阻值测试,另一方面,需要完成火箭燃料输送系统的液路、气路的开启,发动机安全保险机构的解除、箭地配电转换、电池激活等关键动作的控制;在运载火箭起飞后,需要发出时序控制信号,控制火箭上各种火工品工作以完成相应时序的动作,控制箭上姿轨控系统的喷管开启与关闭。因此,时序控制器的可靠性设计具有非常现实的意义。
结合新一代运载火箭控制系统对时序控制器的新要求,提出了一种基于MOS管的运载火箭时序控制器设计技术,充分利用MOS管功率密度大、体积小的优势,开展冗余设计,实现了高可靠和高精度的运载火箭时序控制系统,较好地解决了现有时序控制系统的不足。
1 时序控制器结构及原理
传统时序控制器一般叫综合控制器,由独立的CPU及外围电路组成。综合控制器通过通用总线,如RS422、RS485等接收飞控计算机的控制指令,对外提供时序输出。
本时序控制器对原有综合控制器进行简化,在保留所有功能性能的同时,减小了仪器体积、提高了可靠性。其结构由测控部分和时序输出部分组成,前者包括FPGA电路、测试电路,后者包括驱动电路、基于MOS管的功率输出电路等。根据新一代运载火箭的要求,其中时序输出的被控对象包括火工品时序、电磁阀时序、解保机构时序等,对应的时序控制器中时序输出电路有所不同。时序控制器功能框图如图1所示。
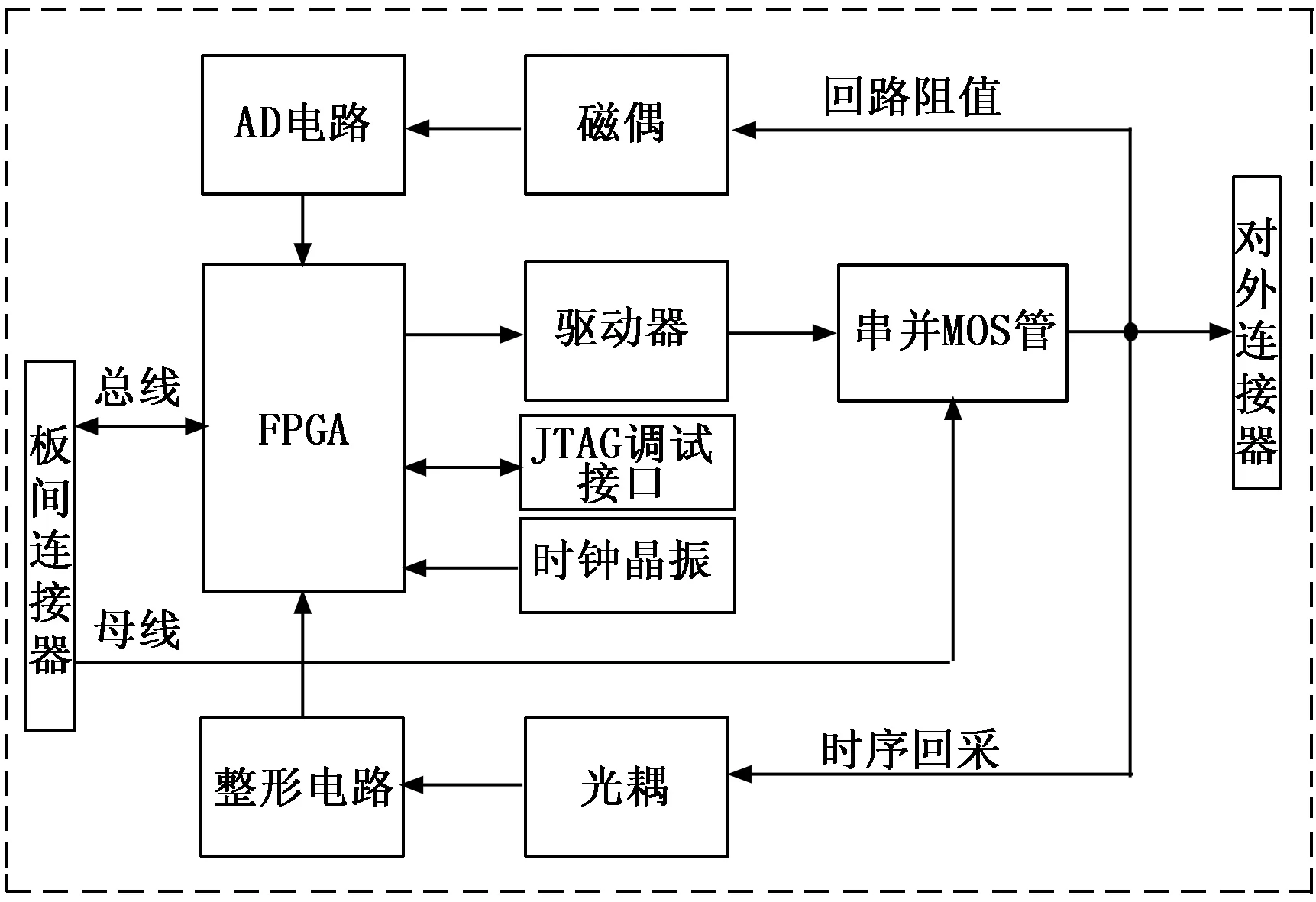
图1 时序控制器功能组成框图
时序控制器的工作原理为,通过自定义高速串行总线接收飞控计算机的指令通过FPGA进行译码、控制,输出有效的时序信号,然后由驱动电路输出到MOS管输入端,再由MOS管输出有效电平驱动火工品或电磁阀动作,完成对应时序输出的控制及驱动。在时序输出的同时,可以通过回采电路进行时序回采,确保了时序控制器的可靠性。
时序控制器的软件运行在FPGA中,包括自定义高速串行总线接收IP核、时序输出控制逻辑、时序回采状态测试及回路阻值的AD采样控制。
为了提高可靠性,功率输出电路中的MOS管采用串并联设计,确保了任意一个MOS管出现短路或断路失效,均不影响时序动作的实现。为了保证火工品的安全,火工品时序输出串联限流电阻;为了抑制电磁阀负载产生的反向电动势,电磁阀时序输出并联消反峰电路。
2 时序控制器硬件设计
2.1 时序输出设计
时序控制器输出电路包括FPGA、驱动电路、MOS管电路。FPGA选用某公司的XXX1000-XX208I芯片,集成了自定义高速串行总线接收端的IP核以及其他逻辑控制等。时序输出电路框图见图2。

图2 时序输出电路图
图2中驱动电路使用LT公司的LT4363作为MOS管驱动控制芯片,该芯片通过电荷泵的控制形式控制MOS开关通断。LT4363芯片为输入浪涌电流控制芯片,实际使用中将浪涌电流检测电阻短路,使电路一直处于稳定导通状态,通过控制欠压端来实现电路的通断控制。当控制芯片LT4363的欠压端电压大于门槛电压1.27 V时,控制芯片正常工作,芯片内部电荷泵加压输出驱动信号;当控制芯片LT4363的欠压端悬空或电压小于门槛电压1.27 V时,控制芯片停止工作。
图2中Kn开关选用某公司的N型MOS管BSC035N10NS5,该MOS管的主要参数如下:工作节温-55~175℃;耐压100 V;最大工作电流100 A;最大结电阻3.5 mΩ。Kn开关电路的MOS管均采用冗余设计,每路输出使用4只MOS管进行串并联设计,电流由并联2个MOS管分担,在大电流流过时可以降低总发热量。
采用本设计基于MOS管方案的优点在于:采用的MOS管体积很小,但流过的电流很大,在一块印制板上可以集成几十路甚至上百路时序输出电路,大大减小了电子产品的体积;MOS管内阻很小,流过的大电流基本不会发热,降低了对产品散热设计的工作量;MOS管开关动作速度快,反映灵敏,没有敏感方向,安装方便,降低了布局布线的设计难度;驱动MOS管电路设计简单,采用具有电荷泵功能的集成芯片,在原有电路上不增加太多硬件,电路设计简单可靠。
2.2 电磁阀节能设计
对于电磁阀需要长时间接通控制的特殊使用,设计了一种节能驱动控制的方案,控制框图见图3。文献[6]提出了一种电磁阀保持电流的自动调节系统设计研究,本方案基于智能控制思想,采用一种PWM控制的节能驱动电路方案。
电磁阀节能驱动电路与普通时序输出电路类似,包括FPGA、节能驱动电路、MOS管,其中FPGA、MOS管选择与常规时序输出电路一致。其设计难点在于驱动隔离信号的产生。为了适应PWM的控制及非节能的电平控制,并考虑到信号隔离,节能驱动电路使用Broadcom公司的高速光偶HCPL-3180作为隔离驱动芯片,配合TI的隔离电源 DCP010515产生隔离信号,控制MOS开关通断。节能控制电路见图3。HCPL-3180作为MOS管的驱动芯片,具有高速、驱动电流大的特点,可同时适应高低电平及PWM控制信号。隔离电源DCP010515用于给驱动电路提供+15V的电压,满足MOS栅源极控制电压电流的要求。
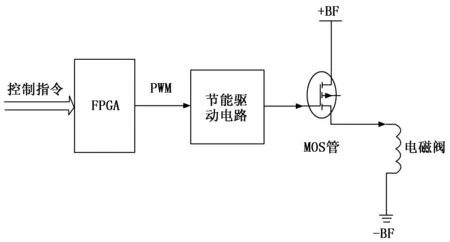
图3 电磁阀节能驱动电路
电磁阀节能驱动电路的控制方法如下。
1)非节能控制:飞控计算机通过自定义高速串行总线发送非节能控制指令;时序控制器中FPGA接收指令并输出高电平信号;节能驱动电路控制MOS接通;电磁阀阀门打开,电磁阀处于非节能工作状态。
2)节能控制:飞控计算机通过总线发送节能控制指令;时序控制器中FPGA接收指令并输出PWM信号;节能驱动电路控制MOS保持接通状态;电磁阀处于节能状态。
3)关闭电磁阀:电磁阀节能状态时间到达后; 时序控制器中FPGA接收指令并输出低电平信号;节能驱动电路控制MOS断开;电磁阀阀门关闭。
其中FPGA输出PWM信号是节能控制方法的关键,为了适应不同的电磁阀节能要求,PWM的频率、占空比参数可调。经过试验表明,电磁阀节能工作稳定可靠,节能电流与设定值一致,达到了节能的目的。
方案中用到的电磁阀节能状态下,PWM脉冲的周期频率为30 K,占空比从100%变化到60%,之后稳定在60%,时间关系如下。电磁阀消耗的电流从非节能的1.5 A降到节能的0.6 A。

表1 占空比与时间对应关系
采用本方案除了MOS的自身优点外,通过FPGA输出的PWM控制信号频率和占空比可变,可以满足不同电磁阀对控制电流的要求,使用安全可靠、灵活方便。
2.3 时序测试设计
2.3.1 时序状态回采
时序是否正确输出,需要有一种简洁的测试手段。给出一种时序输出回采方案,来判断时序状态,作为运载火箭地面测试中一个重要的判据。
如图3所示,时序输出状态回采,通过光耦隔离将时序开关量状态反馈给FPGA,再通过自定义高速串行总线送给飞控计算机。回采电路包括光耦HCLP_0631和施密特触发器 SN74LVC14AD组成,后者用于对时序信号进行整形。由于所选用的光耦为高速光耦,飞控计算机不但能判断时序输出的有无,还能测试时序的时间长度,精度能达到0.01 ms。
2.3.2 回路阻值测试
文献[7-8]提出了火工品线路电流的计算方法及高精度火工品控制电路测试的方案,本方案提出一种火工品回路阻值的低压测试技术。总体的电路方案是通过在时序输出电路中增加回路阻值测试电路,包括+5V1低压电源和电压AD测量电路,来间接测出火工品回路的阻值,功能框图见图4。
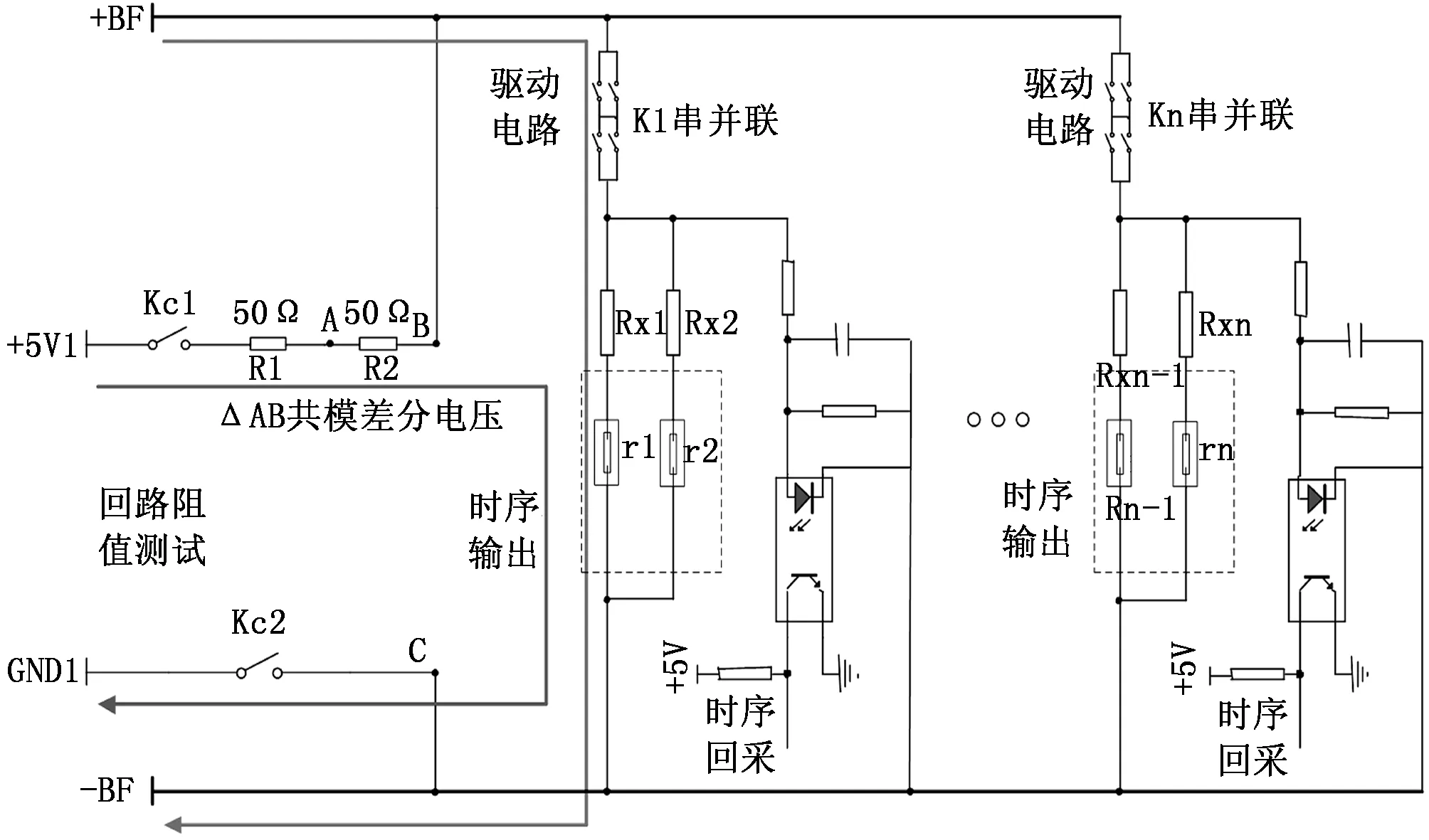
图4 低压测试电路
图4中,r1、…,rn为火工品,Rx1、…,Rxn为火工品保护电阻, +BF为火工品电源正端,-BF为火工品电源负端,K1、…,Kn为相应火工品引爆电路控制开关,Kc1、Kc2为回路阻值测试开关,R1、R2为测试限流电阻。+BF取28 V,R1、R2均取50 Ω,为高精度电阻。
电压AD测量电路采用差分测量的方式,主要包括差分运放、AD转换器和隔离电路。采用差分测试电路具有测试精度高,抗干扰能力强的特点。
火工品回路阻值测试的具体实施步骤如下:

采用本方案进行火工品回路阻值测试的优点在于:低压测试电路简洁明了,在原有电路上增加较少的硬件,电路设计简单可靠。低压测试安全可靠,设计有安全电流保护电阻,使用低压+5 V电源测试时不会引爆外接的火工品,即使测试电阻出现短路情况,安全性仍得以保证,安全性高。电压测量电路精度较高,采用差分原理采集采样电阻上的差分电压,抗干扰能力强,精度高,该测试方案,可以准确测试火工品回路阻值。
3 时序控制器软件设计
时序控制器解析飞控计算机通过自定义高速串行总线发送的时序指令,进行相关时序的接通与断开,同时进行时序回采状态测试及回路阻值的AD采样控制。
时序控制器的软件运行在FPGA中,包括完成时钟输入、复位输入、地址译码、总线接收IP核、时序输出控制逻辑、时序回采模块及回路阻值测试及电压电流测量等功能。结合时序控制器硬件电路及在系统中的测试流程,设计FPGA软件控制框图如图5。

图5 时序控制器工作流程
软件编程、综合及布局布线使用Xilinx公司Vivado2016.4版本,采用基于Verilog语言进行设计。
软件设计按照自顶向下及模块化的设计思路,建立,保持时间符合接口的要求,外部复位增加数字滤波处理,提高了软件设计的可靠性。
安全性设计按照运载火箭系统大纲、规范、软件质量保证大纲要求执行。为了保证软件设计的质量,进行了开发方仿真测试和第三方的测试评审。
4 试验验证与分析
时序控制器属于运载火箭上的关键部件,关系到飞行试验的成败,务必确保万无一失。因此,产品出厂前均需要完成各种单机环境试验、系统匹配试验。
4.1 单机环境试验
在单机环境试验中,完成了规定的环筛、老炼、高低温工作、高低温循环、鉴定振动等环境试验项目。使用自动化测试设备,模拟火箭发射的流程,反复给时序控制器上电并输出时序控制信号。通过采集记录设备存储数据,并对每次的测试结果进行自动判别。
经过对产品的上百次测试,结果表明:时序控制器功能可靠,每次测试都能够在指令规定的时序节点输出控制信号。
4.2 系统匹配试验
时序控制器参与了运载火箭电气系统的综合试验和匹配试验,包括全功率开机模飞、脱拔模飞、一二级被动安控模飞、极性模飞以及终止发射流程等。
从各个专业对天基、地基的数据判读,时序时间可装定,时序精度为优于0.01 ms,时序输出满足了控制系统各项试验要求,为运载火箭型号出厂及飞行试验奠定良好的基础。
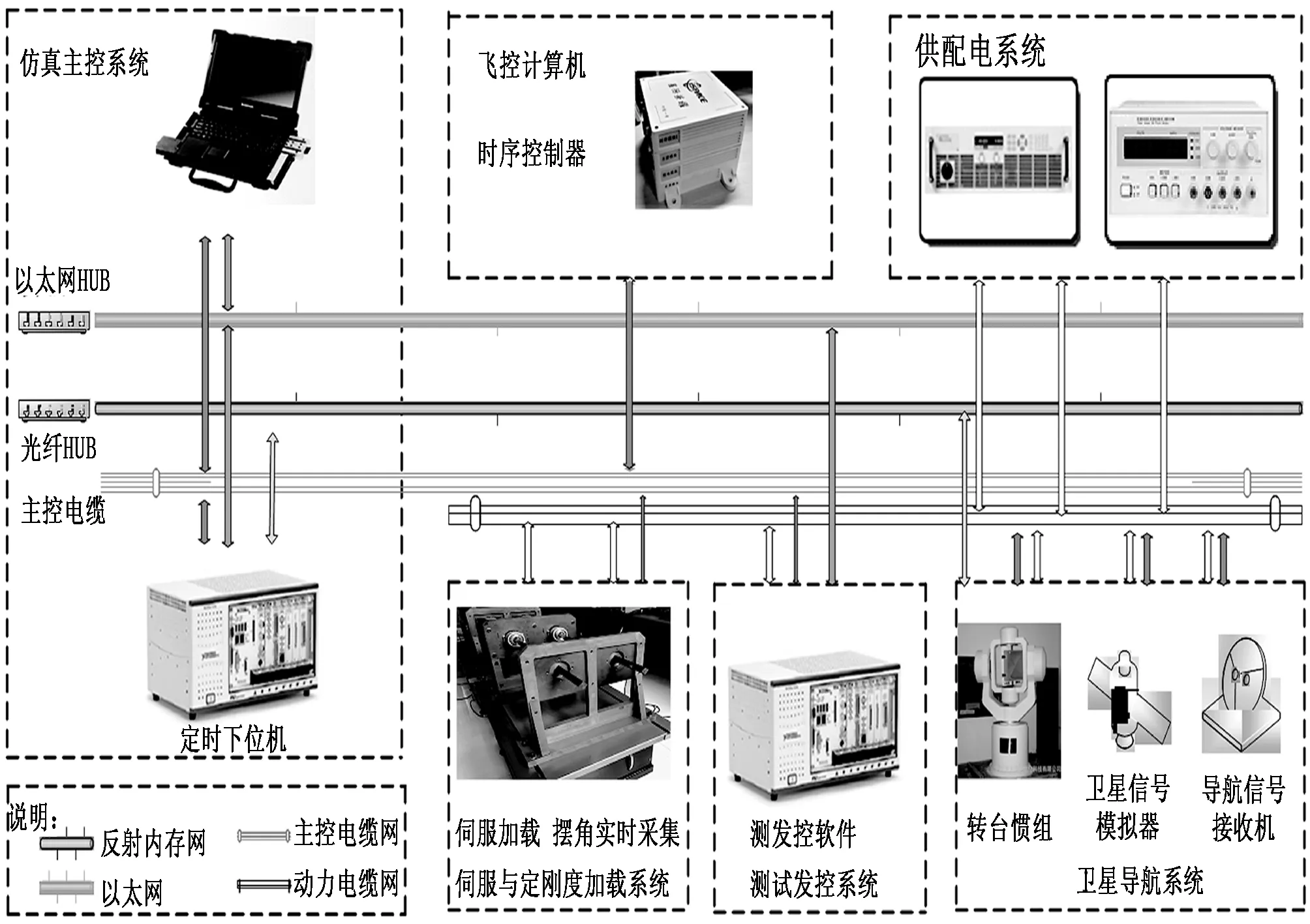
图6 时序控制器参与仿真试验
4.3 系统仿真试验
时序控制器参与了运载火箭系统仿真试验。文献[9-10]提出了时序仿真系统的测试方案,本时序仿真系统以分布式架构为基础,将电气系统各软件、硬件产品部署在“软硬件在回路”的仿真系统里,可兼顾软件测试与时序仿真试验两大需求,并根据不同需求将参试设备进行合理化组合。
通过仿真测试表明,由时序控制器发出的RCS电磁开关信号与设计一致。
4.4 飞行试验
2019年7月25日,时序控制器参加了某运载火箭在酒泉卫星发射中心组织首飞,飞行试验取得了圆满成功。通过遥测数据判读,时序控制器在全程的飞行过程中均工作正常。
5 结束语
基于MOS管的时序控制器主要从高可靠冗余硬件电路设计、测试覆盖性设计等时序控制器的关键技术,对运载火箭时序控制器的实现过程进行了论述。该时序控制器集时序输出、节能时序控制、时序回采及回路阻值测试功能于一体,具有工作稳定、简单可靠、功耗低、体积小的优点,极大地节省了火箭的安装空间。
经过测试验证,该时序控制器设计满足火箭总体要求,经过飞行试验的考核,圆满完成飞行试验任务。时序控制器设计合理,性能稳定,运行可靠,具有一定的通用性。为后续采用整体多模冗余体制的时序控制器产品提供了参考,并对运载火箭的系列化产品研制具有重要的指导意义。