S/X/Ka频段卫星地面站无人机测试标校设计
2021-02-22解玲娜
解玲娜,王 怀
(航天恒星科技有限公司,北京 100086)
0 引言
近年,随着卫星地面系统技术的发展,S/X/Ka三频段测控数传一体地面站已经成为主流,卫星地面站在建设过程及建成使用维护过程中,为减少或消除地面站系统本身的系统误差,必须对卫星地面站进行定期或不定期标校。传统地面站标校系统多采用移动支架或固定标校塔两种方式,以适应S/X两个不同频段的标校需求[1-2],但不能满足Ka频段的标校远场距离和高度。无人机测试标校作为无塔标校的一种技术手段,不仅满足Ka频段标校的远场条件需求[3-4],同时解决了标校塔建造昂贵等一系列问题,更具机动性和灵活性。
国内现行的对于无人机管理方面的法律法规,主要有中国民用航空局飞行标准司颁布的《轻小无人机运行规定(试行)》及《民用无人机驾驶员管理规定》,以上两部规定中对所有的无人驾驶航空器都进行了规定。
关于无人机驾驶员管理的规定,下列情况下,无人机系统驾驶员自行负责,无须证照管理:

表1 无人机分类
1)在室内运行的无人机;
2)Ⅰ、Ⅱ类无人机(如运行需要,驾驶员可在无人机云系统进行备案,备案内容包括驾驶员真实身份信息、所使用的无人机型号,并通过在线法规测试);
3)在人烟稀少、空旷的非人口稠密区进行试验的无人机。
由于无人机机载设备体积与重量限制,标校等机载设备将有别于传统安装于地面标校塔的地面设备。无人机测试标校系统采用多旋翼无人机,具备可悬停、操作灵活、结构简便、机动性强等优点[5]。此外有效载荷小、续航时间短是此类无人机的不足,所以选用Ⅱ类多旋翼无人机作为标校平台,最大限度满足载重需求,并通过备用电池满足续航要求。
1 系统组成
无人机测试标校系统由无人机平台、无人机测试标校载荷、地面控制终端组成,主要组成部分如图1所示,无人机遥控器、远控终端均属于地面控制设备,标校源和标校天线可统称为信标机,属于无人机测试标校载荷部分。
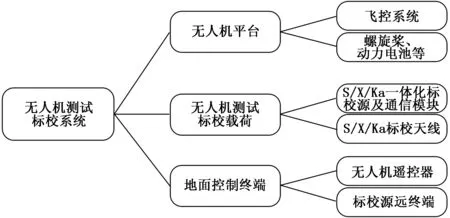
图1 无人机测试标校设备组成
标校的目的是减小或消除系统误差并使系统设备状态最佳,标校系统使用S/X/Ka三种工作频段,均具备左旋和右旋的极化方式,满足S/X/Ka频段相位标校、方向图测试、天线跟踪性能测试需求。
天线相位标校方法是利用搭载在无人机上标校源模块进行校相。其相位标校方法与对塔校相方法类似。主要包括无人机升空悬停,工作参数设置,方位、俯仰粗校及精校,增益调整(定向灵敏度标定),相位检查(交叉耦合检查)等工作。
天线方向图测试方法在通常情况下,其相位标校方法与对塔校相方法类似,经过方位、俯仰粗校,并完成增益调整后,主要包括无人机升空悬停,工作参数设置,方位、俯仰粗校及精校,增益调整(定向灵敏度标定),旋转被测天线,形成被测天线方向图。
天线跟踪性能测试方法也与对塔测试类似,通过无人机测试标校设备发射信号,地面天线多次反复拉偏后自跟踪可测试跟踪精度,同时可搭载多频段标校设备进行S/Ka以及X/Ka等跟踪引导试验。
无人机测试标校系统可三个频段同时使用,也可独立使用,通过地面终端远程控制。地面终端通过对标校源电源控制和旋切开关来实现不同频段组合和天线极化控制,以满足不同的需求。通过远控标校源的电源和极化选择器来实现频率和极化选择,输出不同的频率的极化信号,标校源可实现不同频率的不同极化的组合,进一步实现不同方式标校引导。图2为无人机测试标校系统的典型应用。
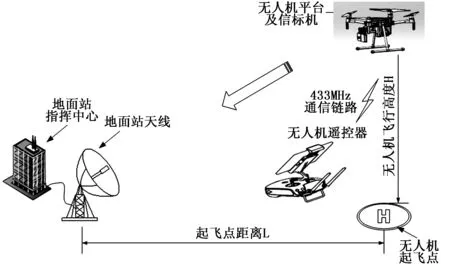
图2 无人机测试标校系统应用框图
2 系统重要指标分析设计
2.1 无人机测试标校发射功率设计
针对天线方向图测试需要保证信标源与测试天线之间距离具备各频段所需远场条件,以S/X/Ka三频段系统为例,根据天线标校的远区场条件,信标天线应位于被测天线的弗朗荷费区域[6],对标校塔要求如下:
1)被测距离R>=2D2/λ;(式中,D为被测天线直径,λ为测试信号波长);
2)被测天线的仰角为半功率波束宽度的3~5倍。
按照工程经验,塔距大于远场条件1/4时,可以形成正常的天线方向图,否则和、差波束畸变,无法采用标校塔法进行标校、测试。因此各频段对标校塔的要求如表2所示。

表2 各频段对无人机的远场要求
通过以上分析可知,Ka频段方向图测试所需最小距离为6.6 km,存在较大的空间链路传输损耗,故需要对无人机测试标校设备天线发射功率进行分析。
自由空间传输损耗公式为:
PL(dB)=32.45+20logR(km)+20logf(MHz)
EIRP =标校源输出-线缆损耗+天线增益,S频段标校源到天线线缆损耗为0.2 dB,X频段为0.3 dB,Ka频段为0.5 dB,EIRP计算如下:
S频段:
EIRPS=-5-0.2+5=-0.2(dBm)
X频段:
EIRPX=5-0.3+5=9.7(dBm)
Ka频段:
EIRPKa=10-0.5+12=21.5(dBm)
根据上式计算到LNA入口电平的结果如表3所示,满足使用需求。
当S/X/Ka频段标校天线输出最大如表3所示,LNA入口电平小于-50 dBm,可保障后端设备使用安全,即各频段发射EIRP设计最大值。

表3 LNA入口电平核算表
因标校距离相对实际收星较近,同时考虑实际标校环境,此处不对发射EIRP最小值进行论述,即标校设备EIRP设计符合系统要求。
2.2 悬停精度对标校的影响
无人机测试标校系统在使用时,无人机的悬停精度影响最大的是方向图的测试,本节以悬停精度(无风):≤±0.5 m为条件进行计算。
如图3,当无人机偏移最大悬停精度要求时(即相对地面天线平移1 m距离时),对应方向角度的偏移β=2α=2*arcsin(0.5/R),据此得出表4结果。
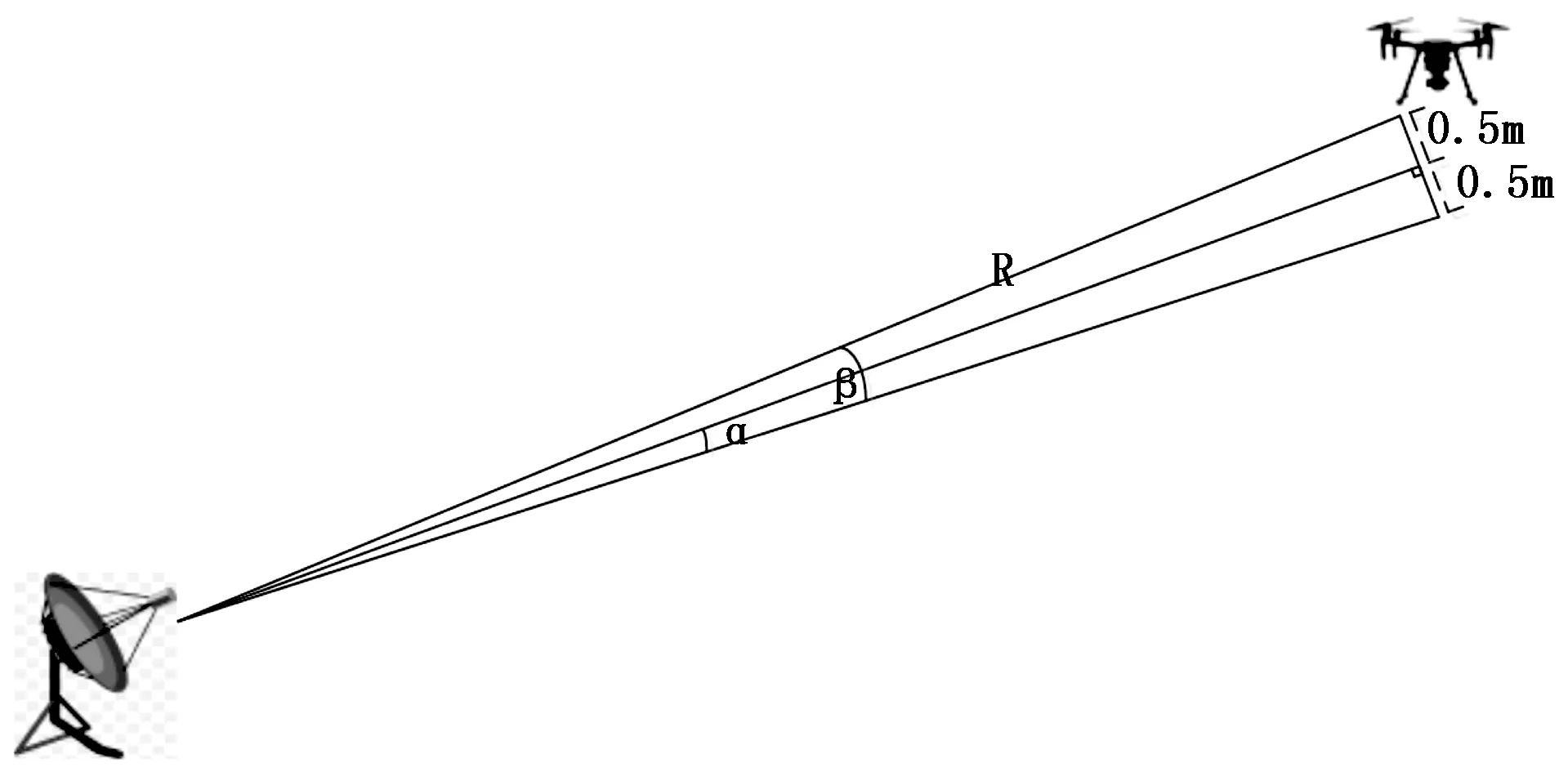
图3 悬停精度分析图

表4 悬停精度对指向影响分析表
由表4可知偏移角度由于天线的指向精度要求,对天线方向测试不会造成畸变。标校源安装在稳定平台上,稳定平台按照相机正常摄像工作为标准,参照国内类似标校系统的调试过程,本系统装配之后将在不同高度、风速环境下进行预调试和数据采集,最终形成系统工作操作规程,以满足天线标校工程需要。
2.3 无人机测试标校续航时间
无人机测试标校设备续航时间受到无人机载重影响,单次续航时间包含了无人机测试标校设备的起飞时间、降落时间、标校天线对准时间以及校相、测试时间。无人机采用电池供电,电池在供无人机飞行的同时,向标校源供电以发射无线信号和向机载测控通信模块供电以完成与地面通信,机上核准电池容量需满足单次至少20 min飞行耗电和信号发射耗电,通过更换电池,实现总续航时间120 min以上。单次续航时间内标校任务规划包含相位标校和方向图测试。
2.3.1 相位标校
1)无人机(含终端确认)、跟踪变频器频点切换时间:3 s;
2)无人机旋向切换时间:3 s;
3)天线自动标校流程时间(工程经验):20 s;
4)无人机上升时间(100 m):100 m/5 m/s=20 s;
5)无人机下降时间(100 m):100 m/3 m/s≈34 s;
按照无人机电池单次续航时间20 min即1 200 s计算,扣除上升、下降约60 s的时间,因此在不考虑切换旋向的前提下,单次可完成1 140 s/23 s≈49个频点校相任务。
2.3.2 方向图测试
1)无人机(含终端确认)、跟踪变频器频点切换时间:3 s;
2)无人机旋向切换时间:3 s;
3)天线方向图单次测试扫描时间(工程经验):
4)俯仰扫描范围以对准角度为基准-3°~3°;
5)方位扫描范围以对准角度为基准-5°~5°;
6)俯仰、方位扫描速度为恒速:0.5°/s;
7)频谱仪设置时间:26 s;
8)频谱仪存图时间:30 s;
因此单频点方向图(方位和俯仰)扫描时间约为(需考虑偏置再回零共2个偏置范围):24 s+40 s+56 s=120 s;
无人机上升时间(100 m):100 m/5 m/s=20 s;
无人机下降时间(100 m):100 m/3 m/s≈34 s;
按照无人机电池单次续航时间20 min即1 200 s计算,扣除上升、下降约60 s的时间,因此在不考虑切换旋向的前提下,单次可完成1 140 s/120 s≈9个频点方向图扫描任务。
3 系统总体设计
3.1 无人机平台
无人机选用大疆Matrice200V2无人机,采用DJI领先的飞控系统,具备双冗余IMU和气压计提升安全性。配合智能电机驱动器,提供了敏捷、稳定、安全的飞行性能。返航功能可使飞行器自动飞回返航点并自动降落。除了可实现稳定飞行和悬停以外,多方位的视觉及红外感知系统使飞行器可及时探测并自主躲避障碍物,进一步提升安全性。

图4 Matrice200V2多旋翼无人机整机图
Matrice200V2无人机起飞重量包括机身重量、动力电池重量、载荷重量,详细重量如表5所示,载重符合Ⅱ类无人机。
M200V2的飞控系统支持飞行模式包括P模式(定位)、S模式(运动)、A模式(姿态)。
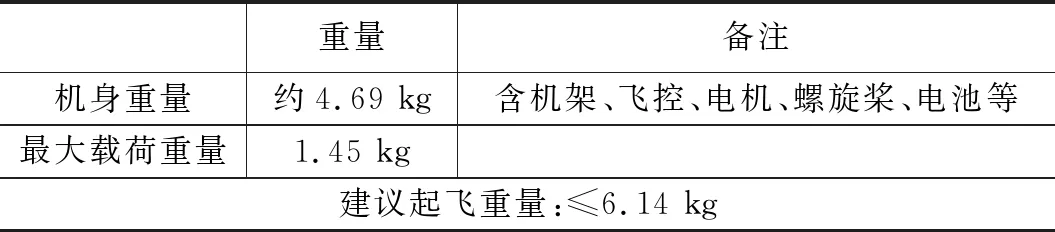
表5 无人机起飞重量表
M200V2无人机具备自动返航的能力。M200V2无人机为操控者提供三种返航方式,分别为智能返航,智能低电量返航以及失控返航。在无人机起飞前已记录返航点,并且具备良好的GPS信号,当遥控器与无人机失联时,无人机也能够自动返回返航点并平稳降落,以防发生危险。
3.2 标校源模块
标校源设计为S/X/Ka频段标校源为同一个模块,集成了标校源远控模块。
机载产品对于重量和功耗,都有严格的要求,体积小、重量轻、功耗低等特点,考虑到要实现三个不同频段,因此标校源采用分频段方案进行设计,将标校源做成标准化模块。
标校源是给标校设备提供激励信号,用来对天线进行标校,其组成原理框图如图5所示。晶振模块给标校源模块提供参考信号,标校源模块通过锁相环电路输出一个频率信号给天线模块,天线模块用来满足激励信号的定向辐射[7]。电源单元用来给整个标校分系统提供需要的电压。
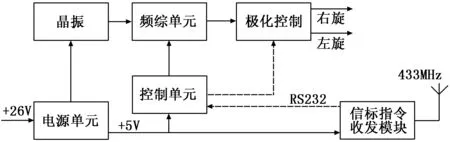
图5 S/X/Ka频段标校源原理框图
标校源输出的信号步进为100 kHz(S/X/Ka频段),考虑的小型化、轻量化和低功耗,标校源模块采用集成的锁相芯片。标校源单元分别输出2.0~2.3 GHz,7.0~9.0 GHz,25.0~27.5 GHz的频率信号,鉴相杂散为100 kHz,输出信号的鉴相杂散抑制50 dBc。
宽带频率发生器原理框图如图6所示。标校源通过加入两级数控衰减器实现-50~10 dB的增益调整,步进为1 dB,输出信号功率最大为0 dBm,满足输出功率调整范围-50~-5 dBm(S)可调、-50~5 dBm(X)可调、-50~10 dBm(Ka)可调和1 dB衰减精度的技术需求。
标校源采用的是无人机电池供电,因此尽量选取小电流低功耗的器件。频率源采用100 MHz温补晶振作为参考时钟,该晶振电流小于6 mA,相位噪声优于-148 dBc/Hz@10 kHz。鉴相器的鉴相频率为100 MHz,采用小数N分频模式,锁相输出本振频率。锁相环电路采用集成锁相芯片HMC830LP6G,该芯片具有高集成度、低相位噪声、宽频带、低功耗等特点,输出频率覆盖25~3 000 MHz,在100 kHz处相位噪声可达到-115 dBc/Hz。
一般情况下,输出频率越高,分频比越大,相位噪声恶化越大,因此只计算最大频点处相位噪声。S频段标校源输出最大频率为2 300 MHz,根据锁相环理论可知,环路带宽内的相位噪声是由晶振和分频比决定,因此可计算出最大频点处相位噪声恶化20 log(2 300/100)=27 dB,可计算出晶振经过恶化后的相位噪声指标为:
-126 dBc/Hz@1 kHz;
-133 dBc/Hz@10 kHz;
-128 dBc/Hz@100 kHz;
-128 dBc/Hz@1 MHz。
环路带宽以外的相位噪声由VCO的相位噪声决定,VCO的相位噪声指标为:
-115 dBc/Hz@100 kHz;
-135 dBc/Hz@1 MHz。
晶振相位噪声曲线与VCO相位噪声曲线的交点在400 kHz处,即最佳环路带宽选择为400 kHz。环路带宽内相位噪声公式:
PN=PNtot+10logfpd+20logN
PN=-227+10×log(100×106)+20×log(2300/100)=
-120 dBc/Hz@10 kHz
实际工程应用中电路对相位噪声的恶化约5 dB,那么最终输出本振信号的相噪可以达到-115 dBc/Hz@10 kHz,-117 dBc/Hz@100 kHz。1 MHz处于环路带宽之外,由VCO在1 MHz处的相位噪声减去恶化值,约为-130 dBc/Hz@1 MHz。

图6 宽带频率发生原理框图
3.3 双圆极化天线模块
天线模块用来实现激励信号的定向辐射,来对被测天线进行标校,天线采用LHCP(左旋圆极化)、RHCP(右旋圆极化)两种极化方式。
S频段和X频段天线均采用微带贴片天线,通过后端微带电桥实现其双圆极化功能,采用隔片圆极化器形成左右旋圆极化。

图7 S/X微带天线图
Ka频段双圆极化天线采用喇叭形式采用隔片圆极化形成左右旋圆极化[8]。

图8 Ka喇叭天线图
3.4 结构设计实现
本次无人机采用取消设备云台相机,利用其安装结构进行增加结构件适配器来安装标校源模块、双圆极化天线。利用无人机原有三轴稳定安装孔位,进行增加适配器。采取利用无人机摄像云台结构接口,根据此结构使标校分系统与之匹配,从而将标校分系统安装在无人机上。根据无人机负载需求尽量减轻无人机负载,使用重量轻、硬质的材料。
模块搭载方式采用利用原无人机负载搭载结构,增加部分结构件,来达到包括标校源模块、双圆极化天线的搭载,主要采用上下对接方式。

图9 标校源、天线安装结构示意图
3.5 系统远控设计
1)标校源远控终端(地面)[9]:
无人机远控终端可对无人机发送频率、极化、功率参数,并可以查询当前参数。纤薄机身,灵巧便携,采用高清电容触摸屏,点击一触即达,使用方便。持久续航,4 500 mAh大电池设计,待机300个小时,正常使用8小时;IP65防护设计,防尘防水,满足苛刻环境使用需求。
2)机载标校源远控通信模块[10]:
机载标校源远控通信模块采用透明传输的半双工的无线扩频通信体制,采用单片机设计,功耗小,性能高。通信模块采用两种工作频段:433 MHz和490 MHz,每个频段各有8个信道,配备有专业的设置软件,模块通信距离可达5 km。
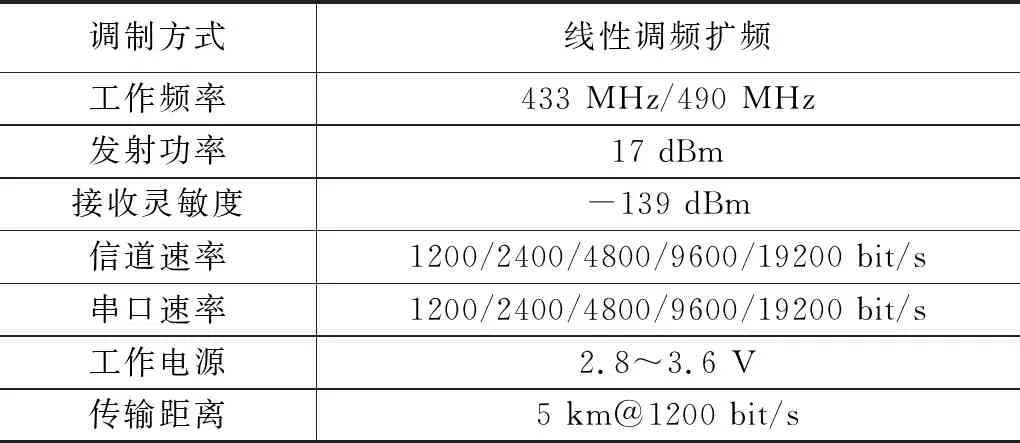
表6 机载标校源远控通信模块指标
为减轻无人机负载重量,机载标校源远控通信模块集成在信标源模块内。远控通信模块与信标模块连接,实现遥控命令的接收下发和数据传输。如图10所示。

图10 远控通信与标校信号发生器模块连接关系
注意:模块的SLE脚悬空或高电平时,模块处于休眠状态。SLE脚是低电平,模块处于正常工作状态。
3)远控软件接口需求:
发送命令格式:帧头(AC55)+终端地址(00~0F)+频率+功率(最高位表示符号)+极化(左旋/右旋)+信道(00~0F);
接收数据格式:帧头(AC55)+终端地址(00~0F)+频率+功率(最高位表示符号)+极化(左旋/右旋)+信道(00~0F)+温度(最高位表示符号)。
4 载重与续航分析
无人机测试标校载荷包括标校源模块、双圆极化天线,结构件等主要部件。将影响无人机飞行性能的指标进行论证,包括载荷功耗和载荷重量。
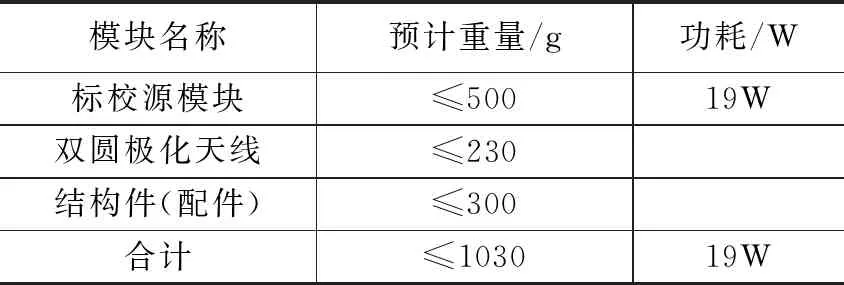
表7 无人机测试标校载荷重量与功耗
无人机机身重量为4.69 kg,载荷重量为1.03 kg,起飞重量则约为5.72 kg,符合无人机“建议起飞重量:≤6.14 kg”的要求,同时也符合II类无人机起飞重量要求。
由于载荷采用无人机电池供电,在无人机第三方接口供电,在模块内进行变压处理,影响无人机续航的主要因素为载荷重量.标校源功耗约为19 W,在单个TB55电池能量为174.6 Wh,2个电池情况下174.6*2=349.2 Wh,根据标校源一小时消耗的能量为19 Wh,349.2:19≈18.38:1,在飞行时间内标校源消耗电池能量不足6%所以可忽略不计。从图11无人机负载&时间曲线来看,载荷1 030 g续航时间约24 min。在满足标校源和机载标校源测控通信模块供电情况下,结合载荷实际重量小于设计重量,满足实际续航时间可实现单次飞行时间(包含起飞、降落)大于20 min。
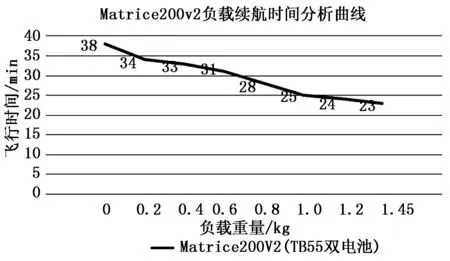
图11 无人机负载续航时间分析图
5 结束语
文中与现有标校塔设备相比的优点在于提高系统的机动性和灵活性,降低成本,较以往标校系统能够满足Ka频段的标校远场距离和高度。本文以Ⅱ类无人机为平台,搭载各频段标校源、标校天线、远控通讯模块,在满足无人机无证照管理的各项规定的前提下,最大利用其载重来进行S/X/Ka三频地面站天线的标校。经过试验验证,证明该设计是可行的,本方法已经成功应用于实际工程中,目前运行良好。