重载工程车辆油气悬架系统控制技术研究现状分析
2021-02-18孙建民周庆辉
孙建民,刘 祥,张 帅,周庆辉
(北京建筑大学机电与车辆工程学院,北京 100044)
油气悬架是搭载了油气弹簧的悬架,相对于一般悬架而言其具有锁死悬架的功能,实现调节车架高度这一功能特点,使得装载了油气悬架的汽车可以适应更加多样的地形条件和更加恶劣的行车环境。与此同时,油气悬架的最大优点在于可以实现多轴平衡,进而增加车辆所允许的最大侧倾刚度,并克服在刹车情况下的制动前倾,这对于载重量和自身质量都较大的重载工程车辆来说是十分重要的部件。
1 油气悬架系统的结构类型
油气悬架按照结构的不同可分为独立式油气悬架和互联式油气悬架两种。互联式油气悬架又可进一步分为同侧前后互联式油气悬架、左右互联式油气悬架、X 型互联式油气悬架和混合互联式油气悬架。不同类型悬架分别适用于不同工作条件,其结构简图如图1所示。
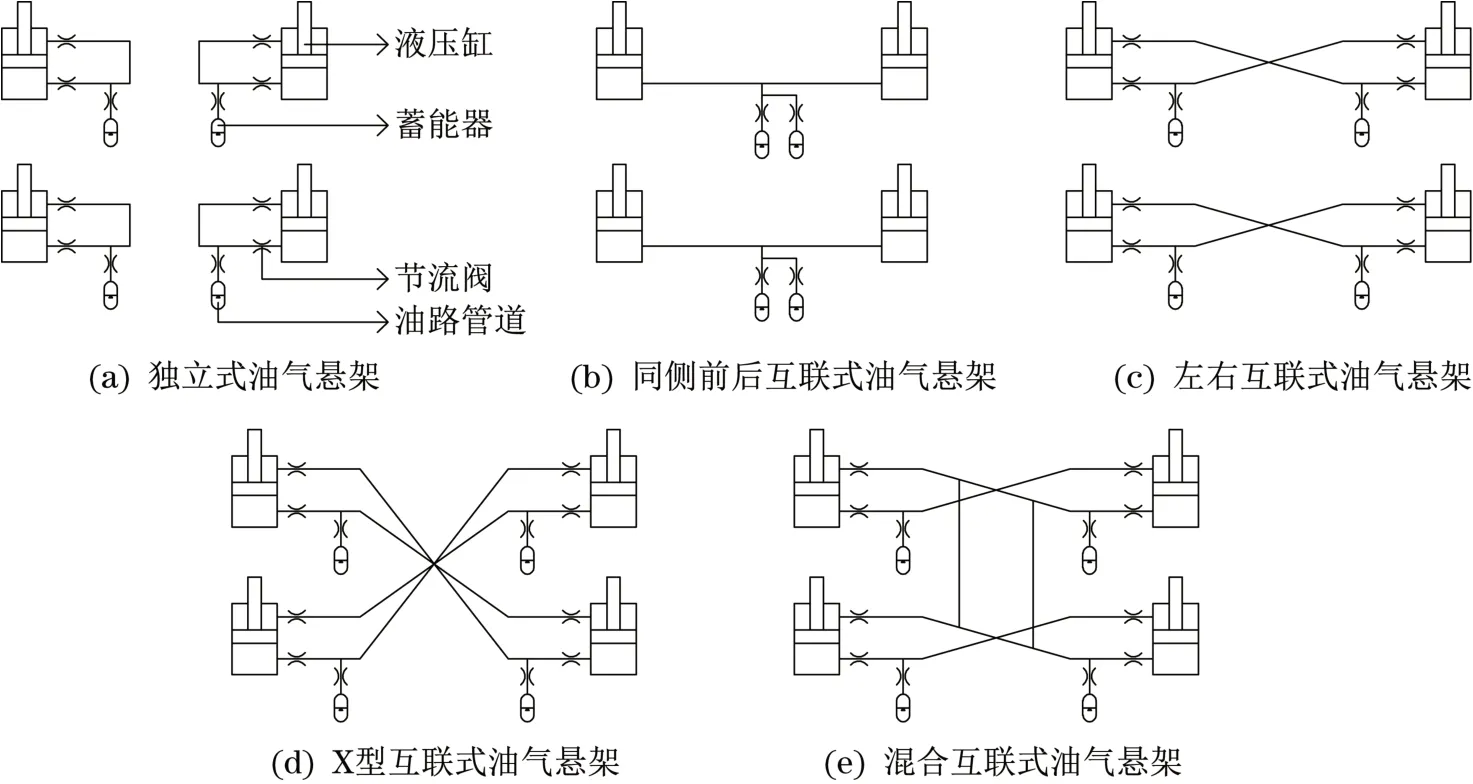
图1 独立式油气悬架与互联式油气悬架结构图Fig.1 Structure diagram of independent hydro pneumatic suspension and interconnected hydro pneumatic suspension
(1)独立悬架就是油气悬架的液压缸相互独立,互不影响。同一根车轴上的左右两油缸相互独立,且不同车轴上的油缸也彼此独立。独立式油气悬架可以调整车身高度,使车辆可以适用于不同路况,因此大多用于大型矿用载重车。当车辆需要涉水时,油气悬架可提升车身高度,保证车辆安全。当车辆通过隧道时油气悬架可降低车身高度,便于车辆行驶与通过。若在倾斜道路上行驶时,可控制一边气缸压缩。另一边伸长,使车辆重心仍然保持水平。
(2)同侧前后互联式油气悬架,即利用液压管把车辆同侧前后两个油气悬架连通,可以起到减小俯仰刚度,还可以平衡前后轮载荷的作用,多用于多轴工程车辆,避免造成桥间的载荷不均。
(3)左右互联式油气悬架,即通过油路管道将同桥左右两个油气悬架交叉互联,可以起到在不增加悬架垂向刚度的情况下,增加其侧倾刚度。多用于重心较高的重型载货车辆,可起到避免侧翻的效果。
(4)X型互联式油气悬架,即通过油路管道将车辆两桥之间的对角油气悬架互联。该悬架有较高的侧倾刚度和俯仰刚度,可以有效提高轮胎操纵性和轮胎接地性。
(5)混合互联式油气悬架,即在左右互联式油气悬架的基础上通过油路管道将不同桥的油气悬架再次进行连通。此种连接方式可以起到在不增加垂向刚度和俯仰刚度的同时提高车辆的侧倾刚度,在不增加垂向阻尼的情况下增加车辆侧倾阻尼,可以起到协调车辆行驶平顺性和操纵稳定性的作用。
油气悬架的结构(如液压缸的直径)会影响悬架性能,蓄能器初始充气体积会影响悬架刚度。悬架的阻尼主要体现在阻尼孔的尺寸和参数上。油气悬架主要搭载于工程车辆上,工程车辆作业环境一般比较恶劣而且多变。因此,加强对这些参数的控制方法进行研究,力求实现悬架的刚度和阻尼可调,进而使车辆可以针对不同工况进行调整是十分必要的。
2 油气悬架系统的数学建模研究
工程车辆油气悬架系统是一个多体系统,各部件间存在着复杂的运动关系,必然给控制研究带来许多困难。因此,在进行油气悬架控制系统设计时,首先要进行简化和数学建模研究。考虑到车辆在行驶过程中外部扰动对悬架性能的影响,在油气悬架系统数学建模过程中,不同的建模方法不仅会影响控制器的控制效果,而且还会影响控制器的实际应用。
2.1 多轴车辆油气悬架系统数学模型
重载工程车辆油气悬架物理模型及整车布局如图 2 所示。Danish 等[1]提出了一种自适应神经模糊推理系统(ANFIS)模型,将神经网络的模式和结构识别能力与模糊逻辑的高效推理能力相结合,并通过模拟计算证明。相比于普通的神经网络和模糊逻辑模型,自适应神经模糊推理系统(ANFIS)模型具有更好的准确度。Kwon 等[2]提出了采用自适应抽样法建立简化模型的方法,将数据变化评价标准以及自适应控制方法引入数据采集中。应用这种方法,可以在选用更少的样本点的情况下,通过更少的计算量,建立更可靠的替代模型。
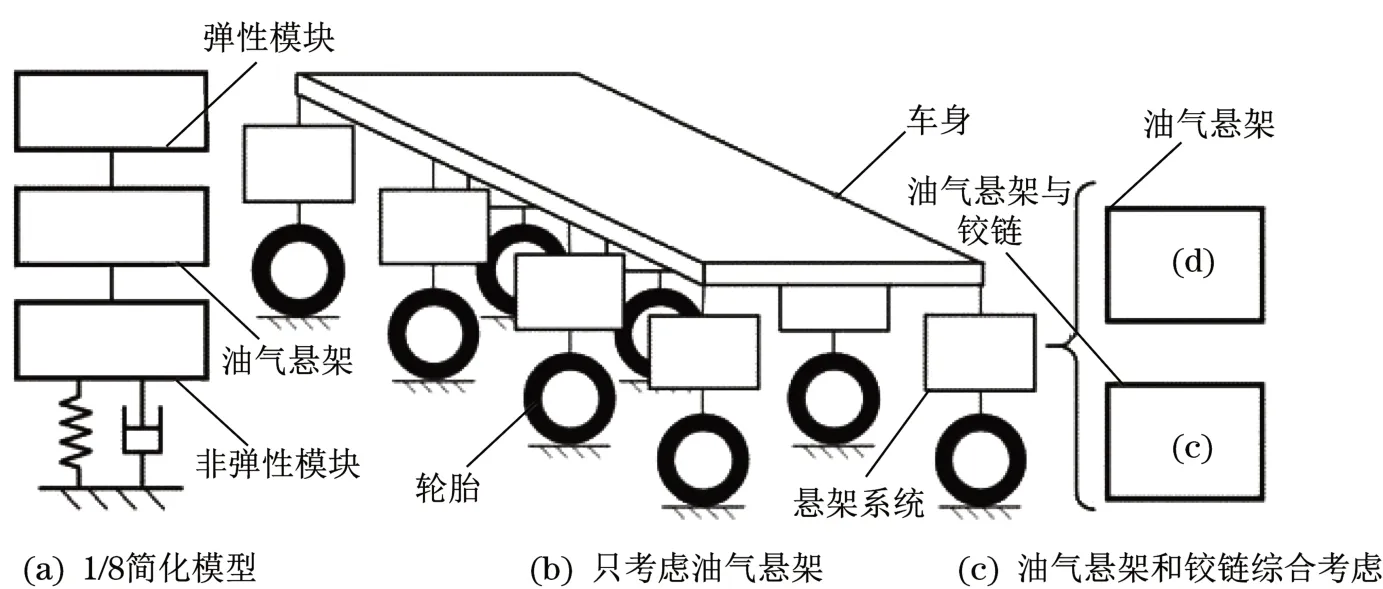
图2 多轴车辆油气悬架模型布局Fig.2 Model layout of hydro pneumatic suspension for multi axle vehicles
2.2 非线性油气悬架系统数学建模
由于油气悬架系统具有非线性的特点,因此要求悬架系统在建模过程中需要考虑诸多非线性因素。油气悬架的非线性建模对油气悬架的性能研究和控制方法研究来说起着至关重要的作用。闫福刚[3]以单气室油气悬架为例,首先通过受力分析得到油气悬架总输出力,由气体弹性力、活塞和缸筒之间相对运动的摩擦力以及油液的阻尼力共同构成,再依次求出各分力的数学模型,进而获得了油气悬架的非线性数学模型。在此基础上,利用ADAMS与Simulink建立了油气悬架的联合仿真模型,仿真流程如图3所示,该模型可以对油气悬架工作特性进行分析。
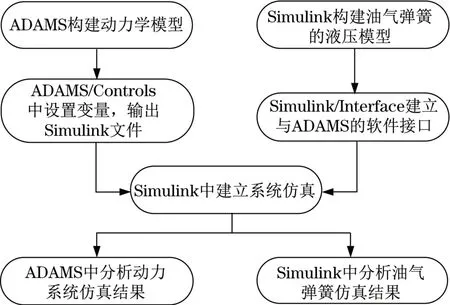
图3 ADAMS 与Simulink 联合仿真流程图Fig.3 Flow chart of Adams and Simulink joint simulation
利用微分几何原理,将非线性油气悬架模型线性化,是解决非线性油气悬架数学建模的一种有效方法。针对单输入输出的非线性系统普遍表达形式为
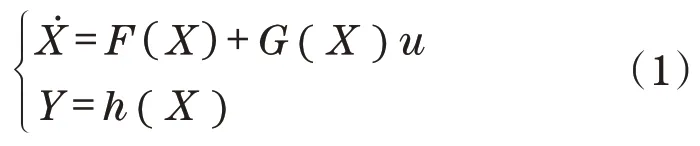
式中:X为状态变量,X∈Rn;F和G为Rn上光滑的向量场,具有无穷阶连续导数;Y为输出变量,Y∈R;h(X)为一充分光滑的函数;u为控制输入量,u∈R。
当系统相对阶r等于系统阶n时,可以对非线性系统进行输入状态反馈线性化,即取适当的坐标变换:

式中:Z为新向量场;L为李导数泛函算子。
得状态反馈变换:

在新坐标系Z下输出Y=h(X)对输入v的线性方程为

3 油气悬架系统控制技术研究
3.1 基于油气集能悬架的自整定PID控制
PID 控制又称比例积分控制,作为一种线性控制器,其根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,再对被控对象进行控制。
一种油气集能悬架结构如图4 所示。该结构由一个具有两个独立腔室的液压双作用油缸组成。液压缸端口A 和B 通过液压整流器连接到液压电机端口C 和D。整流电路由4 个止回阀组成,将双向流转换为单向流,在高压和低压管线上分别安装2 个液压蓄能器1 和2。蓄能器1 用于储存油液能量,蓄能器 2 用于补偿油的短缺。Naeem 等[5]提出了一种采用粒子群优化算法计算最优参数的PID控制器,并对所提出的PID 整定方法的有效性进行了仿真评价,结果表明,该算法使系统的最大振幅和稳定时间都比未控制的系统有所降低,使车辆的乘坐舒适性有了很大程度的提高。
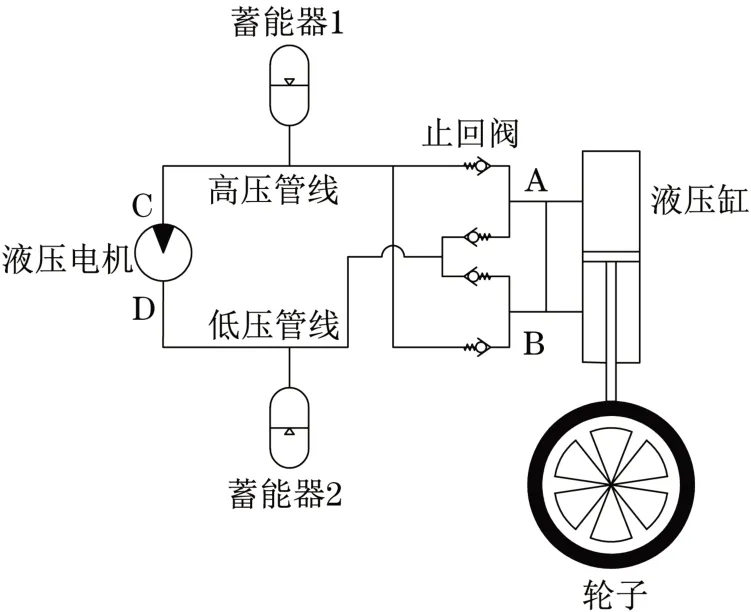
图4 油气集能悬架系统示意图Fig.4 Schematic diagram of hydro pneumatic energy collecting suspension system
3.2 油气悬架自适应反推控制
Savas等[6]针对主动油气悬架系统,提出了一种自适应反推控制方法,系统控制框图如图5 所示。以四通阀活塞为执行机构,zx(t)为车体垂直位移,xv(t)为滑阀位移,F(t)为系统上的力输入,u(t)为输入到液压执行器的电压。采用自适应控制理论和反推技术设计了一种自适应控制系统,即系统的最终控制信号通过一系列“虚拟”信号以递归的方式得到,虚拟信号可直接经由计算得到;递归的每一步只需要处理一个相对简单的误差系统,从而可较灵活地选择控制信号,有效改善过渡过程品质。试验结果表明,此种控制方法可以使车体的垂直加速度大大减小,进而提高车辆行驶的平顺性。

图5 应用反歩技术时组合系统Fig.5 Combined system using reverse step technology
3.3 油气悬架自适应LQG控制
线性二次高斯控制(linear-quadratic-Gaussian control,LQG)是一种要求以系统的所有状态变量作为输入,并表示出全状态的反馈控制方法。应用LQG 算法的优点在于,只需根据系统的响应曲线,就可以找出最优的状态变量和控制变量的加权矩阵。正因如此,使得该算法得到了相当广泛应用。而自适应LQG 控制,可以通过不断测量系统的输入输出,实现模型参数的在线辨识,进而减小不确定性对系统带来的影响。
Sim 等[7]基于半主动油气悬架设计了可用于整车的LQG控制器,如图6所示。图中,A、B和L是由动力学方程转换的状态方程的矩阵。被动约束通过液压阀的打开位置来确定,为了使半主动悬架在一个可行且限定的阻尼力范围内工作,并进行了仿真实验。仿真结果表明,应用了LQG 控制器的车辆行驶平顺性得到了很大程度的提高。

图6 半主动悬架的LQG 控制器Fig.6 LQG controller of semi-active suspension
3.4 油气悬架阻尼和刚度的联合控制
油气悬架虽然可以在一定程度上提升车辆的稳定性,但由于其刚度和阻尼参数无法随外部状态的改变而改变,因此使得车辆的平顺性和操纵性之间存在矛盾而无法兼顾。
北京理工大学张军伟等[8]提出了一种刚度和阻尼均可调控的油气悬架。该悬架将阻尼阀并联节流孔,在节流孔下端安装节流阀,通过改变节流孔的面积获得不同阻尼力。除此之外,该悬架系统还配有主、副两个蓄能器,通过液压回路使不同蓄能器参加工作,实现悬架系统的刚度调节。该设计通过台架试验验证了刚度和阻尼调节的可行性。通过与台架试验结果进行对比,验证了其所建立的数学模型的正确性。此项研究若取得实际应用,则会使搭载相应悬架的车辆适应更多的工况。
3.5 非线性油气悬架系统控制
目前,油气悬架普遍应用于重载工程车辆。由于油气悬架的刚度和阻尼具有明显的非线性特性,且重载工程车辆行驶的道路情况一般都较为复杂,因此对油气悬架的非线性控制方法的研究是十分必要的。PID 算法由于其简单、鲁棒性以及高可靠性的特点而被广为接受。
由于油气悬架在实际工作过程中的时变不确定性以及强干扰性等特点,使得传统PID 控制结果并不理想。孔马斌等[9]提出了基于阻尼实时可调工况的模糊PID 控制,通过粒子群算法对PID 控制参数进行多目标优化,然后通过模糊控制对参数进行在线整定,使油气悬架的性能指标得到改善。模糊PID控制系统如图7所示。通过仿真结果表明,模糊PID控制相比传统PID 控制和被动悬架,在改善车辆平顺性和抵抗冲击能力方面有明显优势。

图7 模糊PID控制系统Fig.7 Fuzzy PID control system
湖南大学李伟平等[10]提出了针对非线性油气悬架系统线性化的PID 控制方法,即应用微分几何线性化理论,经过相应的坐标变换与反馈控制,实现原有控制系统的精确线性化,从而达到在保证原有系统模型准确性的同时,对其使用线性PID 控制方法的目的,线性化PID 控制系统如图8 所示。通过对模糊PID 和线性化PID 的仿真研究表明,相较于模糊PID 控制,线性化后的PID 控制对于改善车辆行驶平稳性更加有利,且线性PID 控制的功率谱振动能量分布更加均匀,说明该方法对非线性悬架系统具有更好的控制效果。
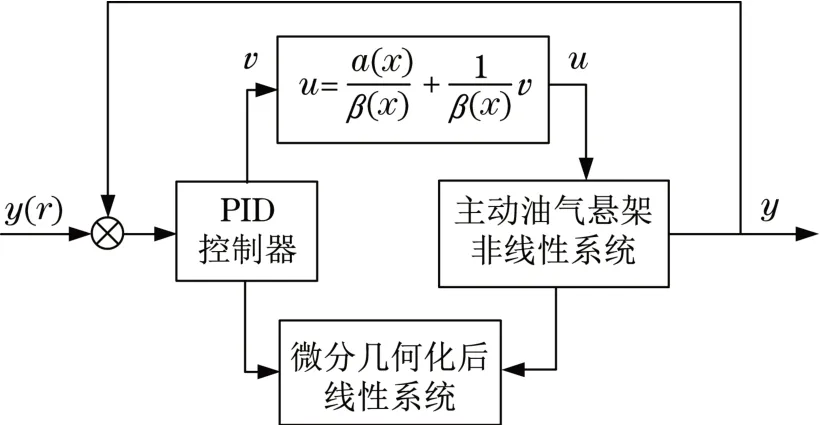
图8 线性化PID控制系统Fig.8 Linearized PID control system
4 结语
油气悬架与普通的钢板弹簧悬架相比,具有结构紧凑、承载力大、自重轻、缓冲减振性能好等特点,因此被越来越广泛地应用在重载工程车辆上,但是针对油气悬架系统控制技术、数学建模方法还需进行深入探讨与研究。对于油气悬架系统,由于国内在此方面开展研究较晚,且与国外研究重点不同,导致我国与国外对在油气悬架的控制技术研究方面仍存在很大的差距,且实际应用也存在很大的局限性。因此,本文基于国内外关于油气悬架控制技术的研究现状,对比了油气悬架控制技术在国内与国外的研究重点,为以后重载车辆油气悬架系统性能的进一步研究与应用提供参考。