基于高频方波信号注入的永磁同步电机初始位置检测方法研究*
2021-02-15呼子茗朱景伟王高林
呼子茗 朱景伟 王高林 杨 旭
基于高频方波信号注入的永磁同步电机初始位置检测方法研究*
呼子茗1, 2朱景伟1王高林2杨 旭2
(1. 大连海事大学船舶电气工程学院 大连 116026;2. 哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
针对表贴式永磁同步电机,使用高频方波信号注入法,对其初始位置检测技术展开研究。对高频方波信号注入法和磁极辨别技术进行理论分析和公式推导,得到转子初始位置的表达式。利用Matlab/Simulink软件搭建永磁同步电机矢量控制系统和初始位置检测系统,仿真结果表明该方法可以准确获得转子初始位置信息,误差为0.05 rad。最后编写初始位置检测和磁极极性辨别的程序,在电机平台上进行硬件试验,试验结果表明该方法可以准确地获取转子的初始位置信息,误差为0.018 rad。
永磁同步电机;无位置传感器控制;高频注入法;初始位置检测
1 引言
近年来,由于直流电机驱动系统具有制造成本高、结构复杂、寿命短、保养维护工作量大等缺点,使得交流调速系统有很大优势。磁场定向控制技术、直接转矩控制技术等高性能控制理论的发展,也为交流电机的发展提供了很大帮助。
永磁同步电机具有起动转矩大、能量密度高、体积小、重量轻、结构简单等优点,近几年永磁同步电机受到广泛的关注,有学者总结了过去、现在、将来的发展情况[1],有些学者研究新型控制算 法[2-3],有些学者使用新型功率器件作为电机驱动[4-5]。但是永磁同步电机系统结构复杂,有多个变量,变量之间相互耦合,因此对其进行控制需要先解耦,解耦后,再分别对各个参数进行控制[6-7]。永磁同步电机的控制方法主要有矢量控制和直接转矩控制两种。
在使用矢量控制时,需要转子位置信息,通常的做法是在电机轴系安装机械位置传感器,通过机械位置传感器获得转子位置信息、速度信息。但是机械位置传感器的存在,不仅大大降低了系统的稳定性,也额外增加了产品的成本。因此无位置传感器控制技术很有优势,应用该技术可以提高系统的稳定性,降低成本、提高产品竞争力。
当前,对永磁同步电机无位置传感器技术的研究十分火热。当电机运行于中、高速时,有学者常使用模型法来获取转子位置[8-9],这类方法应用广泛,比较成熟。当电机运行于零、低速时,常用基于电机凸极性的控制方法来获取转子位置[10],其中包含注入零电压矢量的研究[11-12],基于高频电压注入法的研究[13-14],控制注入噪声的研究[15-16]。
永磁同步电机起动时需要转子的初始位置信息[17]。常用的永磁同步电机初始位置检测方案是“吸合”法,即通过在定子绕组施加开环电压矢量,使转子转到指定位置,以实现电机起动。“吸合”法虽然简单可行,但是使用该方法会导致电机起动前轴系转动,许多场合不允许此现象发生,因此研究不改变电机轴系位置的检测方法有很重要的意义。
脉冲电压注入法也可以检测永磁同步电动机转子的初始位置[18]。脉冲电压注入法是向定子绕组注入不同方向的脉冲信号,对采集到的定子电流进行分析,找到电感值最小的位置,得到转子的初始位置。然而,如果要提高转子初始位置的检测精度,需要增加测试信号的密集程度,也需要更长的检测时间。
基于高频信号注入的永磁同步电机初始位置检测具有更好的效果[19-20]。该方法使用平均值为零的测试信号,不产生非零的电磁转矩,因此不会让电机转动。本文采用高频方波信号注入法检测永磁同步电动机转子的初始位置,并用仿真和试验结果验证所提电机转子初始位置检测方法的有效性。
2 基于高频方波信号注入的转子初始位置检测
2.1 永磁同步电机数学模型
为研究永磁同步电机特性进而进行无位置传感器控制,首先进行永磁同步电机数学模型的建立。经推导得到永磁同步电机在高频信号响应下的数学模型为
2.2 高频方波信号注入法检测磁极位置
图1是转子初始位置检测方法的整体结构图。转子初始位置检测算法包括转子位置误差获取和磁极极性判断两个部分。

图1 转子初始位置检测方法整体结构图
首先是转子位置误差的获取。在进行初始位置检测时,系统没有转速环和电流环,高频方波信号直接注入到估计的轴,估计的轴为0。经过Park逆变换后,送给七段式空间矢量脉冲宽度调制模块(Space vector pulse width modulation, SVPWM),调制信号输出到逆变器上。然后,对定子电流进行一系列处理,最后获得转子初始位置信息。
注入的高频方波信号为
图2是永磁同步电机的坐标系示意图。

定子电流从-轴变换到-轴
将式(4)和式(5)代入到式(1)中并进行整理和化简得


对式(7)进行差分运算,可以得到

最后利用公式计算角度差为

这样,通过PI观测器可以得到转子位置信息。
2.3 转子磁极辨识策略
永磁同步电机的气隙磁场由永磁体产生的磁场和电枢反应产生的磁场两部分组成。空载条件下,永磁体磁链被设计在临界饱和点处,当永磁体励磁磁场和电枢反应磁场同向时,合成磁场强度变大,铁心饱和程度会变大,磁导率下降,定子电感减小;当永磁体励磁磁场和电枢反应磁场反向时,合成磁场强度变小,磁导率变大,定子电感变大,利用这个特性来判断磁极极性。

3 仿真验证
3.1 矢量控制系统仿真验证
仿真时采用的表贴式永磁同步电机,型号为SM060R20B30M0AD,额定电压为36 V,额定转矩为0.637 N·m,具体参数如表1所示,和试验时的参数相同。
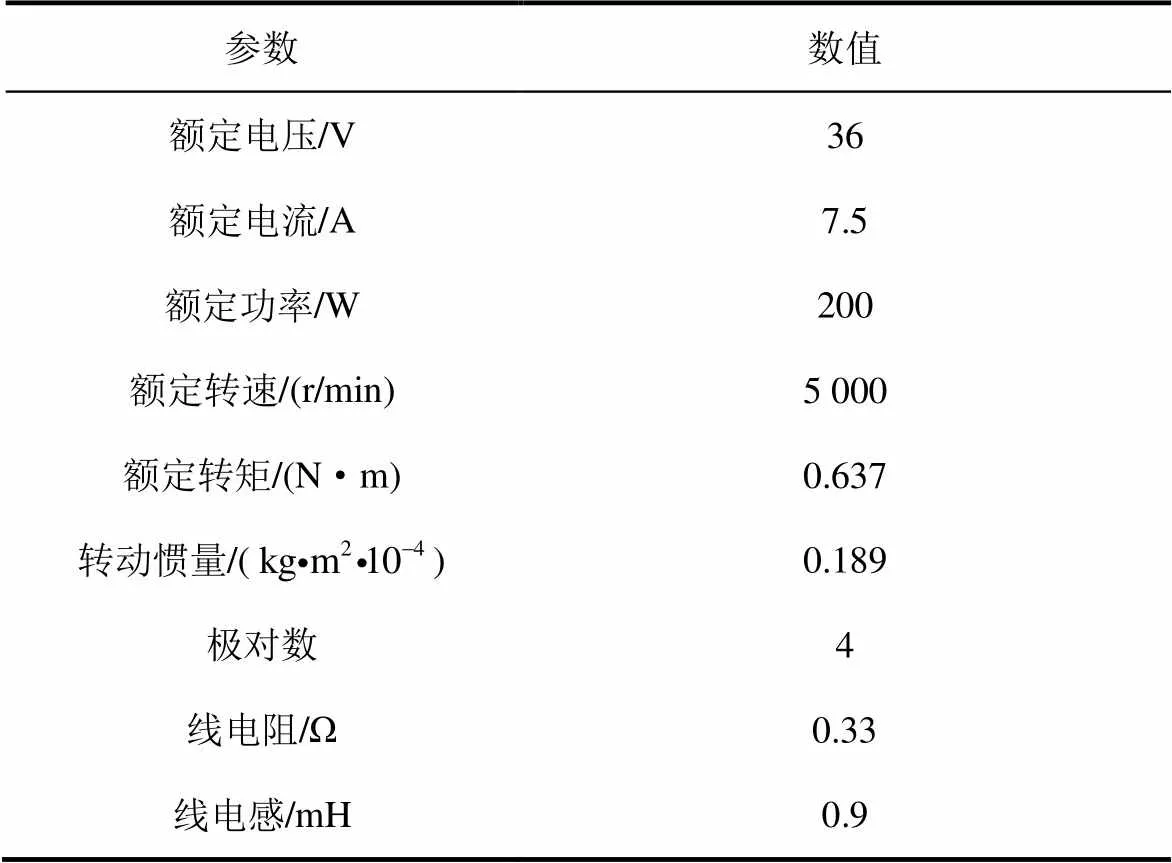
表1 永磁同步电机的参数
3.2 初始位置检测方法仿真验证
永磁同步电机的矢量控制仿真后,进行位置检测的仿真,其中包括高频信号注入、转子位置误差的获取和磁极辨别三个部分。

将采集到的三相电流经过Clark变换后得到静止两相坐标系下的电流;由于定子电流中包含开关管的15 kHz的高频信号,需要首先进行低通滤波,截止频率选为3 kHz。然后根据式(3)进行计算,得到转子位置误差信号,送入PI观测器,得到了转子位置。其中P为2 180,I为240,正限幅为10,负限幅为-10。
转子初始位置检测的仿真结果如图3所示。图3中转子的实际位置是4.254 rad。在0.015 s以后,估测的转子位置正确跟踪到了实际的转子位置,误差在0.02 rad以内。
在傣族众多的口传与非物质文化遗产中,最具有代表性的是有傣族文学的继承、传播和创新者之称的“赞哈”。“赞哈”是西双版纳一带演唱说唱音乐的民间歌手。在傣语中, “赞”是“能手”、“匠人”的意思,“哈”是“歌唱”之意,故“赞哈”是指歌手。“赞哈”是不脱离生产劳动的半职业性的歌手,他们极受老百姓的爱戴和尊重,与傣族的生活有很密切的联系,民间很多重大的活动,如逢年过节、盖新房、婚嫁、祭幡、升和尚等,都要邀请“赞哈”演唱。正如傣族民间谚语所说:“没有赞哈,就像菜里没有盐巴,生活里没有糯米一样。”
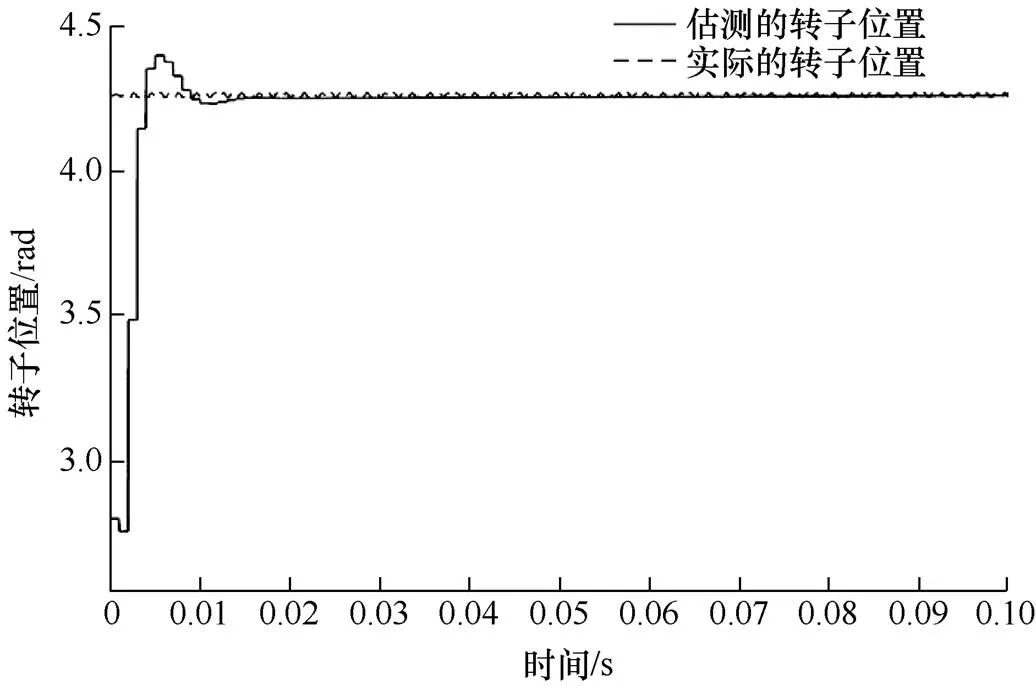
图3 初始位置检测仿真结果
图4是当转子位于4.254 rad时的磁极辨别结果,此时不需要进行补偿,即加0 rad。图5是当转子位于7.399 rad时观测到的转子位置,可以发现此时观测到的位置与转子位于4.254 rad时相同(图3),估测的依然为4.254 rad;图6为此时的磁极辨别结果,可以发现需要补偿prad,补偿后得到最终正确的位置7.399 rad。
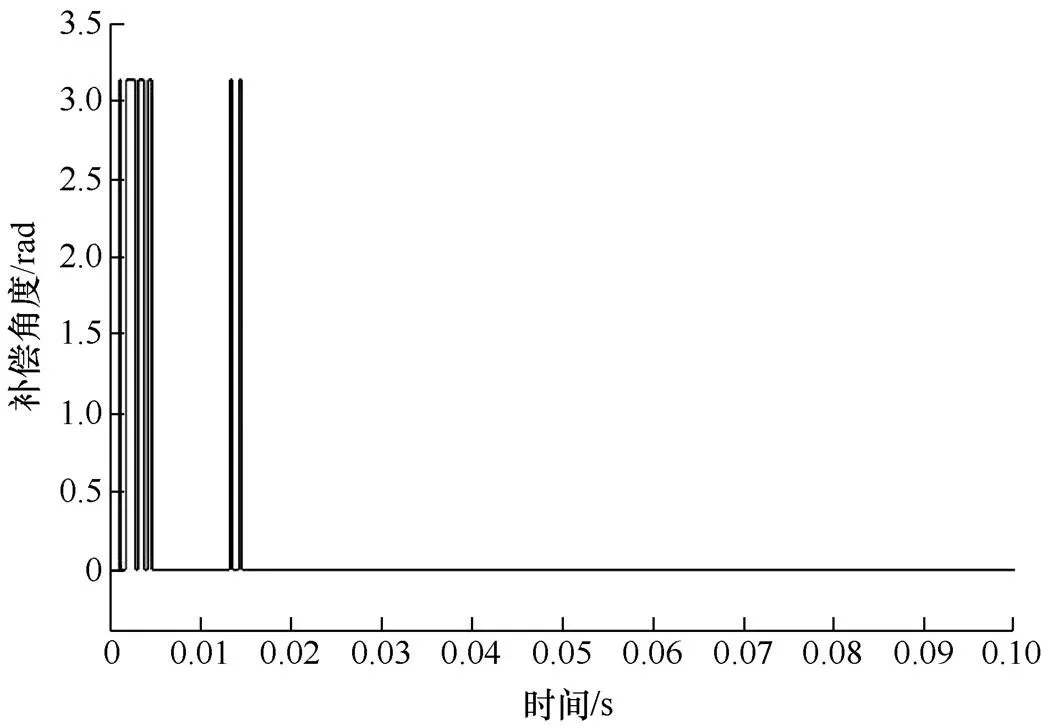
图4 转子位于4.254 rad时的磁极辨别
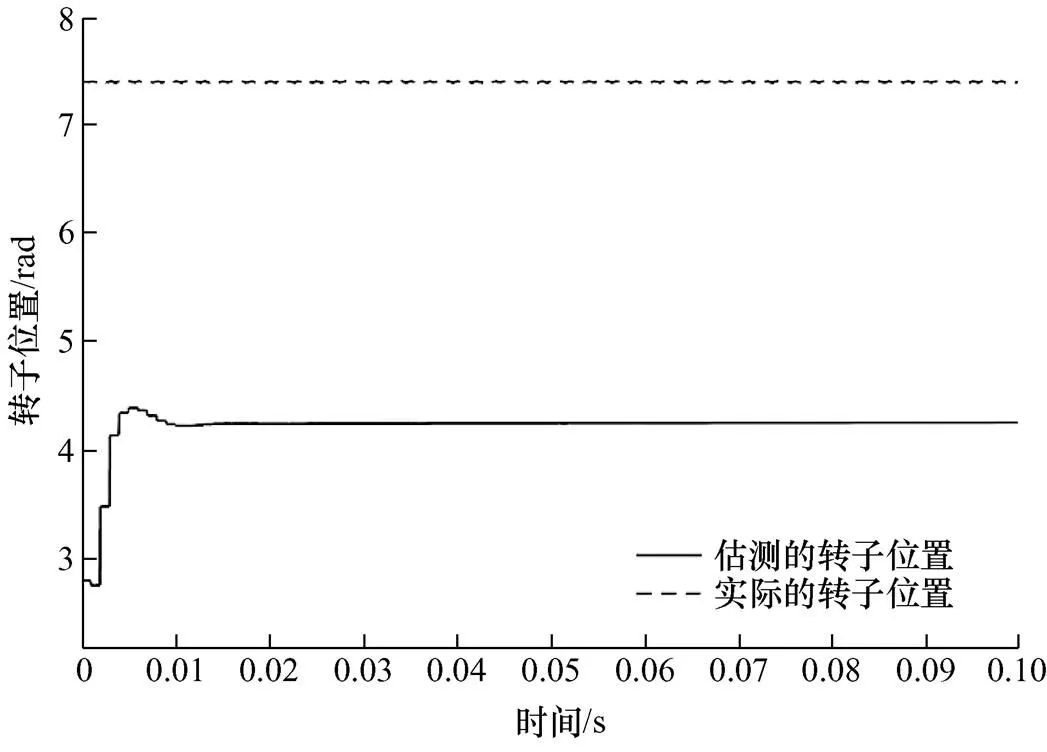
图5 转子位于7.399 rad时的位置检测
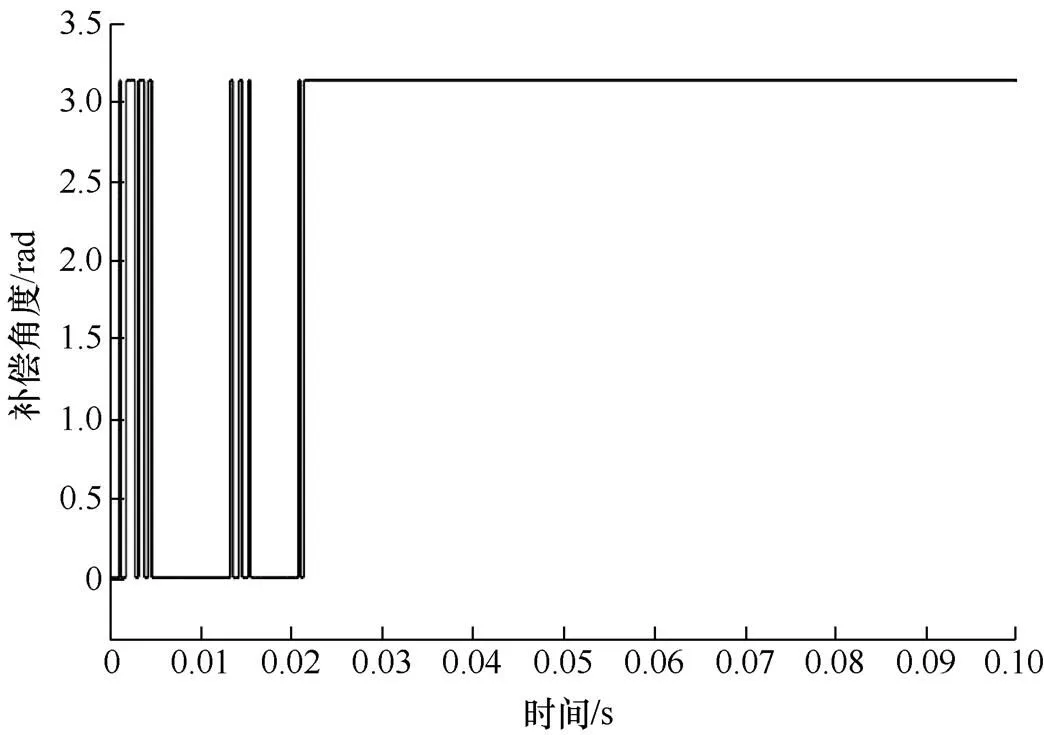
图6 转子位于7.399 rad时的磁极辨别
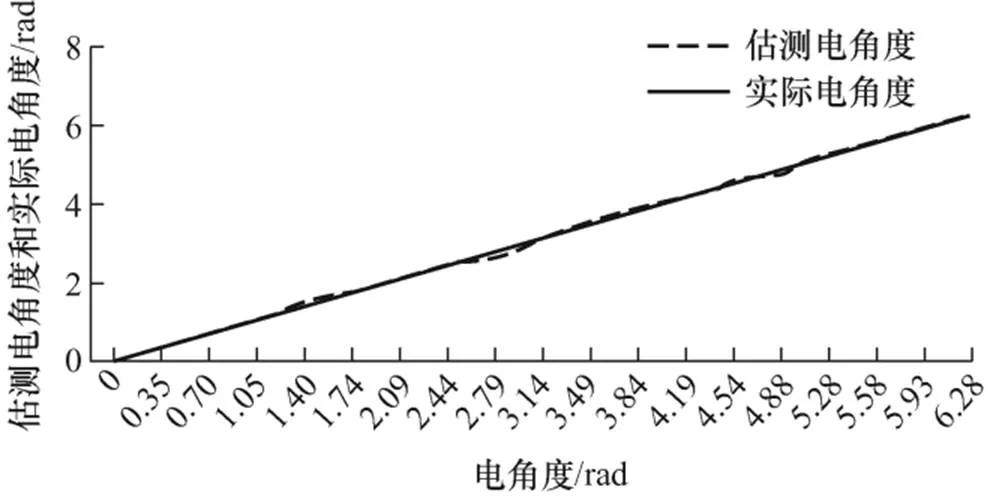
图7 初始位置检测(0~2p)
从图7可以看出,估测的转子位置与实际的转子位置误差比较小,均在0.05 rad范围内。
4 硬件试验验证
4.1 试验平台介绍
采用合肥中科深谷科技发展有限公司的电机平台进行试验,如图8所示,电机平台由电机对拖平台、电机驱动控制试验箱、上位机和软件包组成。
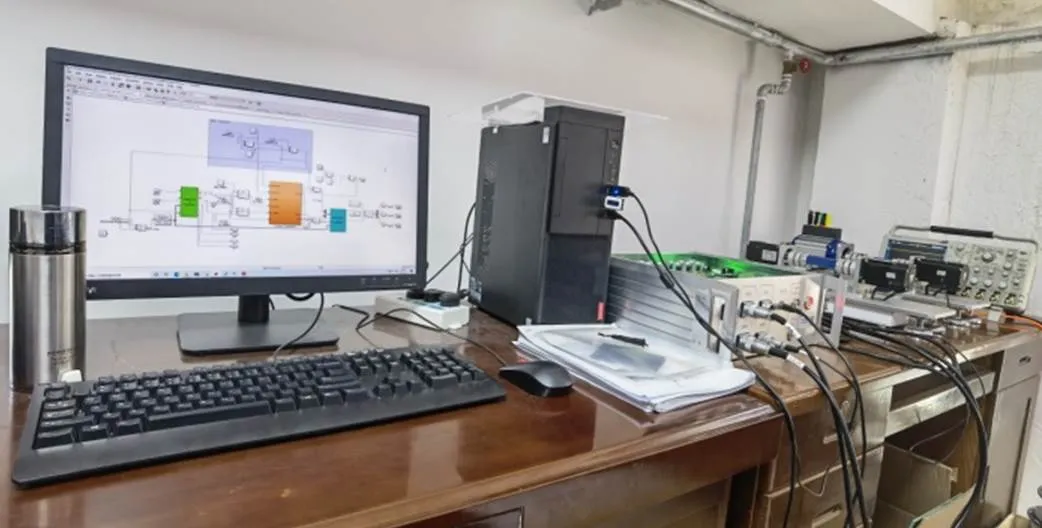
图8 试验平台
此平台可以由搭建的Simulink模型自动生成DSP程序,简化了试验流程,使用起来比较方便。配套的上位机可以实时观察4个参数的波形图,6个参数的值,并将数据储存到记事本文件中。试验平台采用的永磁同步电机参数如表1所示。
电机驱动控制箱由控制板、电机驱动板、电源板、通讯板和底板构成。其中主控芯片为TMS320F28335,该芯片具有150 MHz高速处理能力,性能能够满足电机控制时的大量运算。电机自带增量式位置传感器,作为实际转子位置来验证算法的正确性。
4.2 电机控制系统程序设计
试验验证的整体思路为先用吸合的方式正常起动永磁同步电机,然后利用位置传感器使其定位到某一已知位置后停止转动,启动初始位置检测程序,得到试验结果。下面将从矢量控制及位置环的搭建、初始位置检测部分的搭建两个部分来说明初始位置检测的实物构成。
基础控制部分由电流环、转速环、位置环、SVPWM模块、PWM发生器、ADC采集、上位机通信、定时器中断等部分构成,整体是在矢量控制的基础上增加了位置环,其中参数如表2所示。

表2 控制环的参数
在完成矢量控制及位置环的搭建后,开始进行初始位置检测部分的搭建。
注入的高频信号是定时器中断产生的。配置一个2 kHz的定时器,在定时器中断中对一变量进行翻转,再对幅值进行处理得到了频率为1 kHz、幅值为1 V的方波。注入方波信号后,对采集到的定子电流进行处理,和仿真部分相似,先经过滤波,再经过运算得到误差信号,再由PI观测器得到转子位置,最后进行磁极极性辨别,得到最后的结果。调试后P参数为0.1,I参数为0.05。
4.3 试验结果及分析
如图9所示是上位机截图,实线方框内是实际的转子位置4.187 rad,虚线方框内是估测的转子位置4.205 rad,误差0.018 rad。
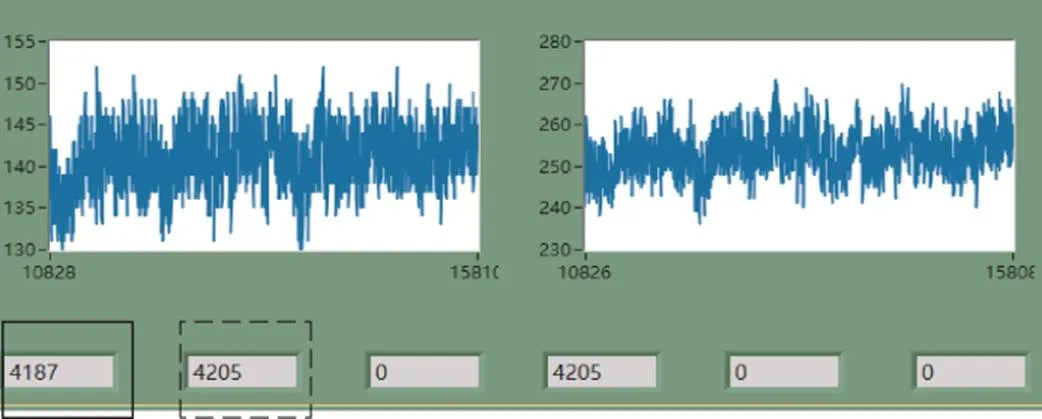
图9 上位机截图
如图10所示是实际的转子位置。从图10中可以看出,在位置环和矢量控制的作用下,电机转到电角度4.187 rad后,保持在静止状态。
如图11所示是估测的转子位置波形图。从图11中可以看出来,估测转子位置为4.205 rad。
图12和图13分别为硬件试验过程中的相和相的电流变化情况。
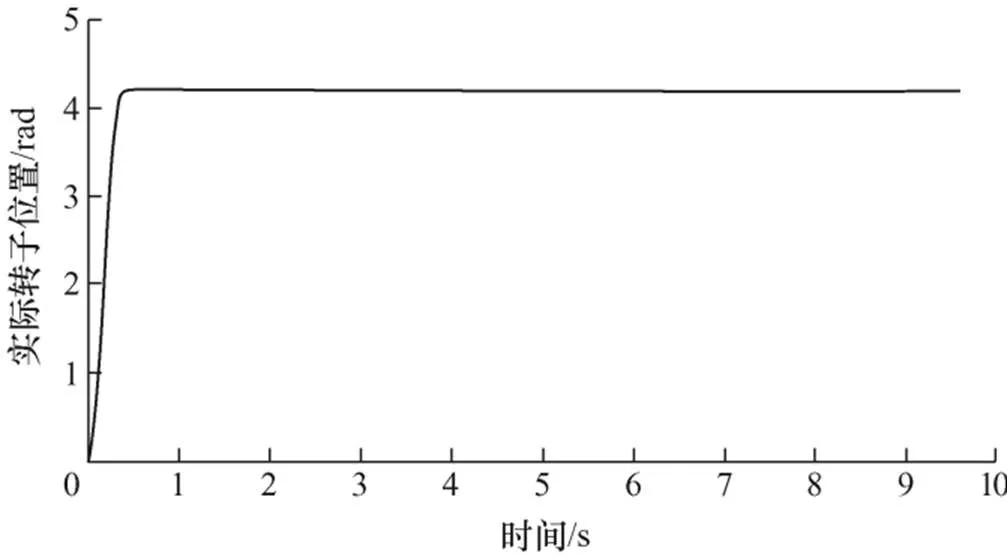
图10 实际转子位置
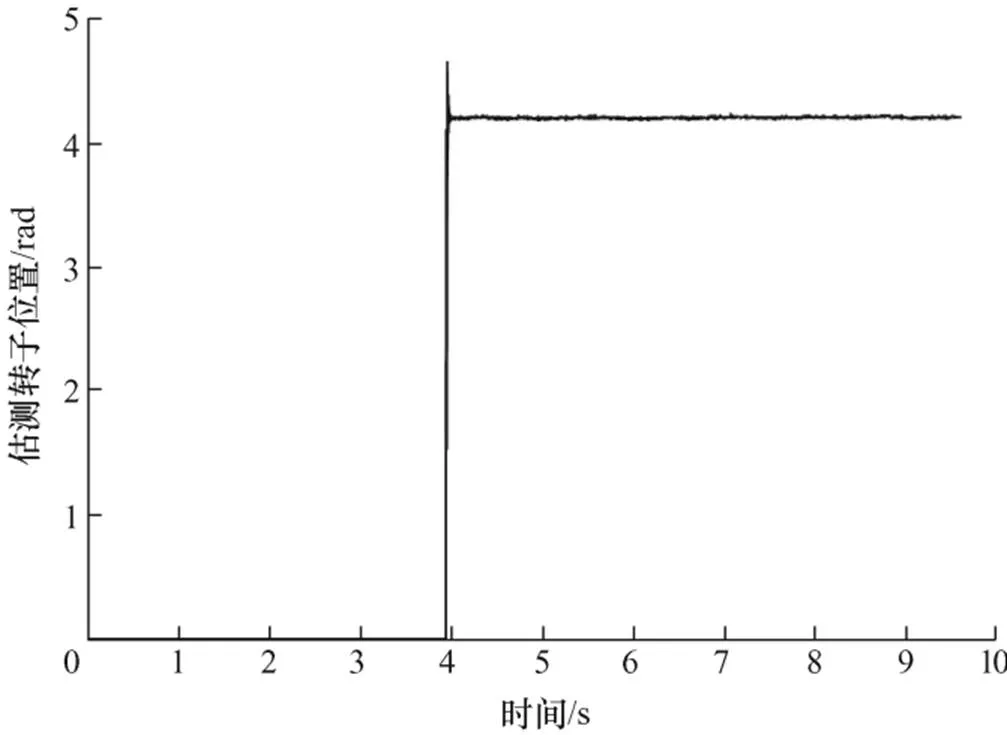
图11 估测转子位置
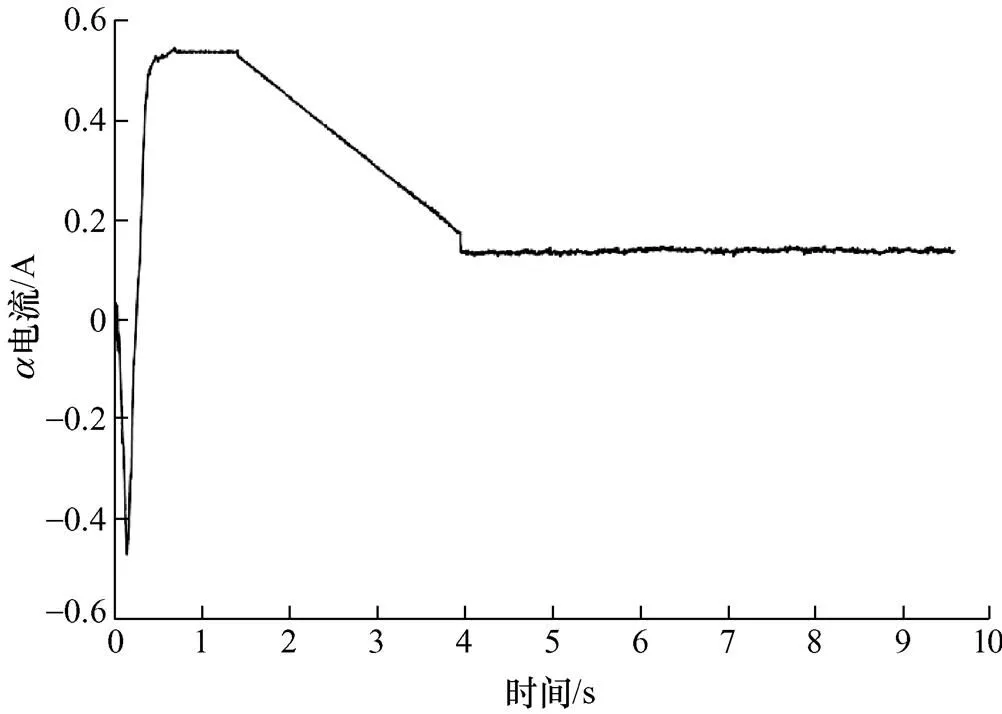
图12 a相电流

图13 b相电流
5 结论
永磁同步电机具有高功率密度、高效率的优点,在工业和民用电机驱动系统中得到越来越广泛的应用。无位置传感器算法对于驱动系统降低成本、提高系统容错运行能力具有巨大优势。本文研究了基于高频信号注入的表贴式永磁同步电机的初始位置检测,并且结合磁极辨别技术获取初始位置信息以代替位置传感器。本文主要研究工作和研究结果如下。
(1) 针对表贴式永磁同步电机,使用高频信号注入法,对其初始位置检测进行了研究。首先向定子绕组注入高频方波信号,然后对采集到的定子电流进行滤波、计算等一系列操作,最后得到初始位置信息。
(2) 研究了表贴式永磁同步电机的磁极辨别技术。根据定子铁心饱和的原理,通过对轴电流求平均值的方式,获得了转子的磁极极性。
(3) 搭建了Simulink仿真,仿真结果表明初始位置检测和磁极极性辨别是正确的,误差在0.05 rad内。
(4) 在基于TMS320F28335主控芯片的电机平台上进行硬件试验验证,试验结果表明算法是正确的,误差在0.018 rad之内。
[1] SUL S K,KIM S. Sensorless control of IPMSM:Past,present,and future[J]. IEEE Transactions on Industry Applications,2012,2(1):15-23.
[2] ZHANG X,HOU B,MEI Y. Deadbeat predictive current control of permanent-magnet synchronous motors with stator current and disturbance observer[J]. IEEE Transactions on Power Electronics,2017,32(5):3818-3834.
[3] YANG S C,LORENZ R D. Surface permanent-magnet machine self-sensing at zero and low speeds using improved observer for position,velocity,and disturbance torque estimation[J]. IEEE Transactions on Industry Applications,2012,48(1):151-160.
[4] GUO Q,ZHANG C,LI L,et al. Efficiency optimization control of permanent magnet synchronous motor system with SiC MOSFETs for electric vehicles[C]// 2017 20th International Conference on Electrical Machines and Systems (ICEMS),2017:1-5.
[5] RAHMAN M F,NIKNEJAD P,BARZEGARAN M R. Comparing the performance of Si IGBT and SiC MOSFET switches in modular multilevel converters for medium voltage PMSM speed control[C]// 2018 IEEE Texas Power and Energy Conference (TPEC),2018:1-6.
[6] MARCIC T,STUMBERGER B,STUMBERGER G . Differential evolution based parameter identification of a line start IPM synchronous motor[J]. IEEE Transactions on Industrial Electronics,2014,61(11):5921-5929.
[7] DING D,WANG G,ZHAO N,et al. An anti-overvoltage control scheme for electrolytic capacitorless IPMSM drives based on stator current vector orientation[J]. IEEE Transactions on Industrial Electronics,2020,67(5):3517-3527.
[8] WANG G,YANG L,YUAN B,et al. Pseudo-random high-frequency square-wave voltage injection based sensorless control of IPMSM drives for audible noise reduction[J]. IEEE Transactions on Industrial Electronics,2016,63(12):7423-7433.
[9] CHEN F,JIANG X,DING X,et al. FPGA-based sensorless PMSM speed control using adaptive sliding mode observer[C]// IEEE Industrial Electronics Society IECON,2017:4150-4154.
[10] 洪琨,刘刚,毛琨,等. 基于新型高频注入法的表贴式永磁同步电机转子初始位置检测方法[J]. 电工技术学报,2018,33(13):2914-2922.
HONG Kun,LIU Gang,MAO Kun,et al. Rotor initial position detection method of surface mounted permanent magnet synchronous motor based on new high frequency injection method[J]. Transactions of China Electrotechnical Society,2018,33(13):2914-2922.
[11] WANG G,KUANG J,ZHAO N,et al. Rotor position estimation of PMSM in low-speed region and standstill using zero-voltage vector injection[J]. IEEE Transactions on Power Electronics,2018,33(9):7948-7958.
[12] WANG Hechao,LU Kaiyuan,WANG Dong,et al. Simple and effective online position error compensation method for sensorless SPMSM drives[J]. IEEE Transactions on Industry Applications,2020,56(2):1475-1484.
[13] JANG J H,SUL S K,HA J I,et al. Sensorless drive of surface-mounted permanent-magnet motor by high- frequency signal injection based on magnetic saliency[J]. IEEE Transactions on Industry Applications,2003,39(4):1031-1039.
[14] JANG J H,HA J I,OHTO M,et al. Analysis of permanent-magnet machine for sensorless control based on high-frequency signal injection[J]. IEEE Transactions on Industry Applications,2004,40(6):1595-1604.
[15] BI Guangdong,WANG Gaolin,ZHANG Guoqiang,et al. Low-noise initial position detection method for sensorless permanent magnet synchronous motor drives[J]. IEEE Transactions on Power Electronics,2020,35(12):13333-13344.
[16] WANG Hechao,LU Kaiyuan,WANG Dong,et al. Simple and effective position estimation error compensation method for sensorless SPMSM drives[J]. IEEE Transactions on Industry Applications,2020,56(2):1475-1484.
[17] 田兵,安群涛,孙东阳,等. 基于磁饱和效应的表贴式永磁同步电机初始位置检测方法[J]. 电工技术学报,2016,31(1):155-164.
TIAN Bing,AN Quntao,SUN Dongyang,et al. Initial position detection method of surface mounted permanent magnet synchronous motor based on magnetic saturation effect[J]. Transactions of China Electrotechnical Society,2016,31(1):155-164.
[18] XU P,ZHU Z. Novel square-wave signal injection method using zero-sequence voltage for sensorless control of PMSM drives[J]. IEEE Transactions on Industrial Electronics,2016,63(12):7444-7454.
[19] MEDJMADJ S,DIALLO D,MOSTEFAI M,et al. PMSM drive position estimation:Contribution to the high-frequency injection voltage selection issue[J]. IEEE Transactions on Energy Conversion,2015,30(1):349-358.
[20] WANG G,YANG L,ZHANG G,et al. Comparative investigation of pseudo-random high frequency signal injection schemes for sensorless IPMSM drives[J]. IEEE Transactions on Power Electronics,2017,32(3):2123-2132.
Research on Initial Position Detection Method of Permanent Magnet Synchronous Motor Based on High Frequency Square Wave Signal Injection
HU Ziming1, 2ZHU Jingwei1WANG Gaolin2YANG Xu2
(1. School of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026;2. School of Electrical Engineering & Automation, Harbin Institute of Technology, Harbin 150001)
The initial position detection technology of surface mounted permanent magnet synchronous motor (SPMSM) is studied by using high frequency square wave signal injection method. Firstly, the high frequency square wave signal injection method and the magnetic pole discrimination technique are theoretically analyzed and the formula is deduced to obtain the expression of the initial position of the rotor. Then, the vector control system and the initial position detection system of permanent magnet synchronous motor (PMSM) are built by Matlab/Simulink. The simulation results show that the method can accurately obtain the initial position information of the rotor with an error of 0.05 rad. Finally, the program of initial position detection and pole polarity identification is written, and the hardware experiment is carried out on the motor platform. The experimental results show that the method can accurately obtain the initial position information of the rotor, and the error is 0.018 rad.
PMSM;sensorless control;high frequency injection method;initial position detection
10.11985/2021.04.010
TM341
* 国家自然科学基金资助项目(51777024)。
20210701收到初稿,20211018收到修改稿
呼子茗,男,1999年生。主要研究方向为永磁电机控制技术。E-mail:13165561871@163.com
朱景伟(通信作者),男,1963年生,博士,教授,博士研究生导师。主要研究方向为交流电机优化设计及其控制技术。E-mail:zjwdl@dlmu.edu.cn
王高林,男,1978年生,博士,教授,博士研究生导师。主要研究方向为交流电机驱动技术、交流电机无传感器控制技术、无电解电容器电机驱动系统、宽禁带功率器件在电机系统的应用、电机参数辨识与状态监测技术、同步磁阻电机驱动控制技术、永磁直驱式电梯控制技术、电机高效再制造能效提升技术。E-mail:WGL818@hit.edu.cn
杨旭,男,1994年生,硕士。主要研究方向为永磁同步电机无传感器控制技术。E-mail:1415552112@qq.com
