基于直轴电压分析的PMSM逆变器死区补偿策略
2021-02-15于家文朱鹏程徐永向
于家文 朱鹏程 徐永向
基于直轴电压分析的PMSM逆变器死区补偿策略
于家文 朱鹏程 徐永向
(哈尔滨工业大学电气工程及自动化学院 哈尔滨 150001)
死区效应会导致逆变器输出电压畸变,使永磁同步电机SVPWM控制的实际输出电压不等于给定的参考电压,降低控制性能。对永磁同步电机驱动系统中的逆变器死区效应进行分析和补偿,建立包含死区的逆变器输出电压数学模型,提出一种基于直轴电压分析的死区补偿策略,通过分析电压谐波在线辨识死区大小,然后根据数学模型进行前馈电压补偿。该方法无需添加硬件,且实现简单,仿真和试验表明该方法能够有效消除死区导致的电压、电流谐波。
永磁同步电机;死区补偿;逆变器
1 引言
永磁同步电机(Permanent magnet synchronous machine,PMSM)由于具有体积小、功率密度高、高转矩惯性比等优点,被广泛应用于交流伺服系统中[1]。永磁同步电机需要使用逆变器作为驱动电路,为了防止逆变器上下桥臂直通,必须加入一段死区时间[2],此外,开关管存在开启时间和关断时间,开关管和二极管存在管压降,它们统称为“死区效应”[3-4]。死区效应会导致输出电压畸变,产生电流谐波,导致电机损耗提升,转矩脉动增大,控制性能降低[5-7]。因此,需要对死区进行补偿。进行死区补偿可以从硬件和软件两个方面进行[8]。
文献[9]用硬件检测出实际输出电压,与控制器给定值相比较得出死区导致的电压偏差,然后将偏差与给定值叠加以进行补偿。缺点是需要额外的硬件成本。
软件补偿是利用已有的采样数据,设计各种算法以尽可能消除死区的影响。文献[10-11]根据PMSM数学模型建立电压误差观测器,实时观测出当前给定电压与应给定电压的误差,建立基于误差电压的PI反馈,将误差电压前馈到给定电压中以进行补偿。但该方法需要已知准确的电机电阻、电感、磁链等参数。文献[12-14]建立考虑死区的输出电压模型,通过查表估计的方法来确定补偿电压大小,根据死区对输出电压的影响,在控制器中反向给予电压以进行补偿。但是死区会随工况变化,因此估计的补偿电压不完全准确。文献[15]离线测量死区大小与输出电流的关系,根据确定的关系在线调整补偿电压,主要缺点是对每一个逆变器都要进行一轮离线试验。
综上,实现准确的死区补偿主要有两个关键点。
(1) 建立准确描述死区效应影响的输出电压数学模型。
(2) 需要一种能够在线确定死区大小的方法。
首先建立逆变器输出电压关于控制器给定电压、死区时间、开关管开启关断时间和管压降的数学模型,在此基础上提出一种基于直轴电压分析的死区补偿方法。利用死区导致的直轴扰动电压的特征,在线辨识死区大小,然后根据数学模型进行前馈电压补偿,以抵消死区的不利影响。
2 死区效应分析
2.1 死区对输出电压的影响
图1为PMSM电驱动系统示意图,为母线电压中点,为电机中性点。

图1 PMSM电驱动系统示意图
进行公式推导以分析死区效应对输出电压的影响。首先推导管压降的影响:以A相为例,图2显示出逆变器A相的四种工作状态,规定电流正方向为电源流向负载,规定S表示上下桥臂开通状态,S=1表示上桥臂开通,下桥臂关断,S=0反之。
考虑开关管和二极管压降,点相对于点的电压可以归纳如下

式中,sgn(i)为关于i的符号函数,当i>0,sgn(i)=1;当i<0,sgn(i)=0。V为母线电压,V为开关器件的导通压降,V为续流二极管的导通压降。
同理,点和点相对于点的电压分别为

(3)
开关管和二极管的导通压降随电流大小变化,可以近似表示为


式中,V0与V0分别为功率器件与续流二极管在电流为0时的压降,R与R为二者的等效电阻,压降随电流增大近似线性上升。
开关管存在上升时间T和下降时间T,如果1尚未完全关断,4即导通,将导致上下桥臂直通,进而导致电源短路。为避免这种情况,需要人为加入死区,死区持续时间用T表示。T、T和T将对输出电压产生的影响如图3所示。

图3 死区对开关管导通以及输出电压的影响
其中,图3a为A相上下桥臂的理想触发脉冲,图3b为加入死区后的触发脉冲,图3c和图3d分别为死区和开通、关断延迟时间的影响下,A桥臂实际输出的相电压波形。如图3所示,在i>0时,死区时间T和开通时间T使输出正电压时间减少,关断时间T使正电压时间增加;i<0时,死区时间T和开通时间T使输出正电压时间增加,关断时间T使正电压时间减少。
设上桥臂的理想导通时间为T*,对比图3a和图3c,可以得出死区效应引起的时间误差(比理想时间增加的时间)为

对比图2a和图2d,误差时间为

因此,误差时间可以表示为

则考虑死区效应后,A相有效导通时间变为

为方便后续推导,设

2.2 包含死区的输出电压数学模型
以T表示一个周期时间,改写式(1),则一个周期内V的大小为

由于

得出
因此


因此A相电压误差为

同理得出另外两相误差


为方便后续书写,设

3 新型死区补偿策略
提出一种新型死区补偿策略,通过分析直轴电压谐波,实时辨识死区的大小,将其用于前馈电压补偿以抵消死区影响。
3.1 前馈电压补偿方法

得到不同电流方向时的ΔV和ΔV如表1所示。
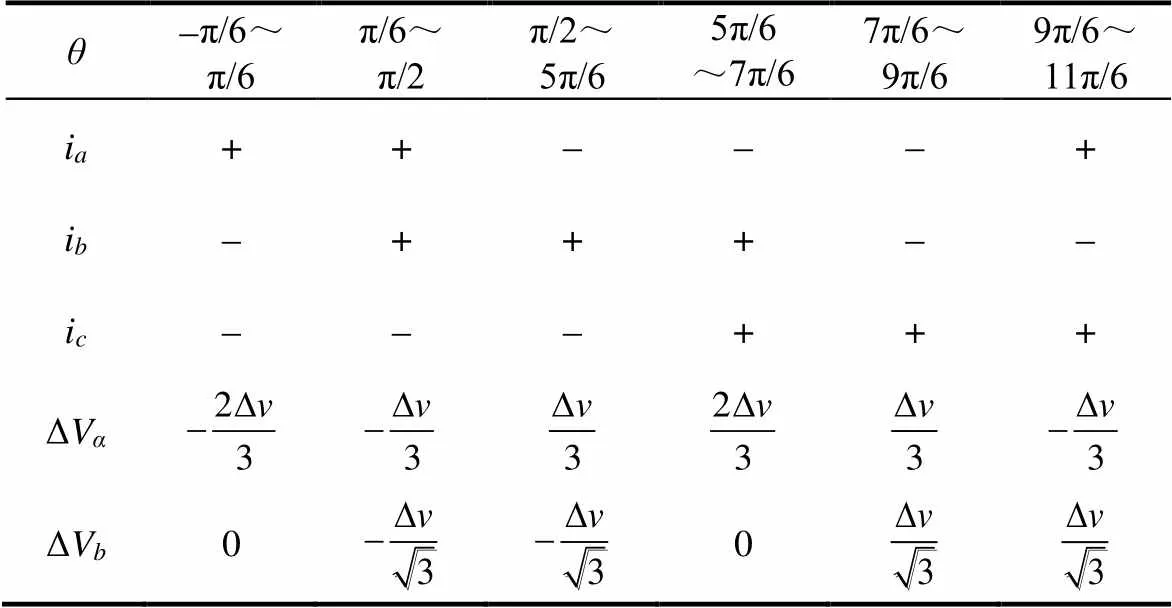
表1 死区效应对αβ轴电压的影响


图4 前馈电压补偿示意图
3.2 基于直轴电压分析的Δv辨识
从表1和图4中可以看出,决定死区补偿效果的关键是Δ的取值是否准确。根据器件手册和程序中死区设置,可以用式(19)粗略计算出Δ,但数据手册中的参数不完全准确,而且开关管和二极管压降会随电流变化而变化,所以Δ是一个随电流变化的量,因此有必要在线进行Δ的辨识。
对ΔV和ΔV进行Park变换,得到死区效应造成的、轴电压扰动如表2所示。

表2 死区效应对d、q轴电压的影响
当i=0时,轴和轴扰动电压如图5所示。可见,以增加3/π角度作为一个周期,轴电压扰动的大小在2Δsin(-π/6)~2Δsin(π/6)之间往复循环。

图5 d、q轴扰动电压
根据上述规律提出一种简易的方法在线计算Δ。构建一个算式,根据电流矢量角,将每周期前半部分的u乘以-1,将计算后的u命名为u',表达式为

式中,为电流矢量角,mod表示取余。
经过上述变化,扰动电压Δu在负半轴的部分全部翻转到正半轴,如图6所示。
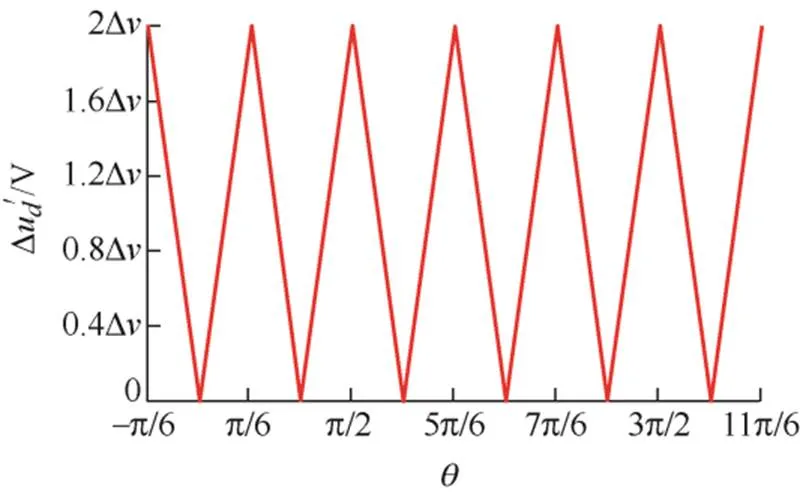
图6 翻转后的d轴扰动电压
对多个周期做如上变化后取平均值,由于正好一半时间的u被取反。u原本的直流量和其他谐波平均值变为0,该平均值仅与Δ有关

3.3 闭环死区补偿策略
使用上一节的方法可以辨识出所需的补偿电压Δ,但仅仅进行开环计算并不实用,原因如下。
(1) 理论的死区扰动电压是在开环情况下推导所得。图7为试验得出的u扰动电压与理论电压的对比,可见实际扰动电压在每周期的开头和结尾都不是单调递增的波形,与理论不完全相等。因此开环计算的Δ将存在一定误差。

图7 试验与理论d轴扰动电压对比
(2) 将Δ应用于前馈电压补偿后,则不再有完整的扰动电压作为分析材料,就无法在线对Δ进行更新。
为解决以上问题,用闭环迭代的方式实时更新Δ,并进行前馈电压补偿,方法如下所示。


图8 特征谐波提取方法示意图


图9 闭环死区补偿示意图
4 仿真结果分析
用上述死区补偿方法进行仿真,仿真中电机参数表3所示,电机控制方式为i=0矢量控制。母线电压为132 V,加入死区时间T=0.02T,开关管开启时间、关断时间为0,管压降V和V均为0.5 V,算得理想死区补偿电压Δ=6.28 V。

表3 仿真中的电机参数
由于该死区补偿算法包含了一个比例系数,取不同的值进行多组仿真。将=4、=6、=20时的Δ波形绘制在图10中。
可见,取=6时,仅一次计算就得到接近理想值的Δ,随后稳定在理想值附近;取< 6时,辨识到的Δ逐渐上升,多次迭代后可以收敛于理想值;取过大的也能在几次迭代后收敛于理想值,但在收敛之前,Δ在理想值上下大幅度浮动。

图10 取不同k时的Δv辨识结果
死区补偿前和补偿后的轴电压波形如 图11、12所示,有死区存在时,轴均存在锯齿状谐波,加入死区补偿后,谐波基本消除。此外,补偿后轴电压也有所降低,这是因为死区带来的轴扰动电压包含直流分量(图6),而补偿电压u*对其进行了补偿(图4)。

图11 死区补偿前/后的d轴电压
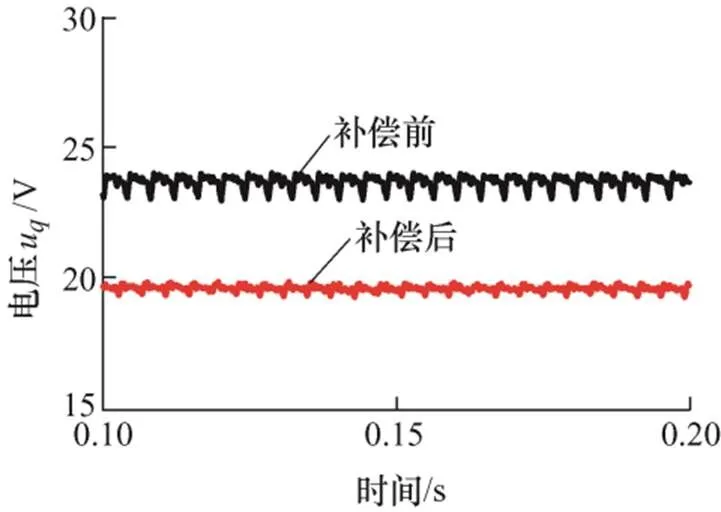
图12 死区补偿前/后的q轴电压
分别对无补偿和有补偿时的u和u进行傅里叶分析,如图13和图14所示。无补偿时,u和u都含有6倍频谐波及6的倍数次谐波,加入死区补偿后,谐波显著减小。

图13 补偿前/后d轴电压FFT分析结果
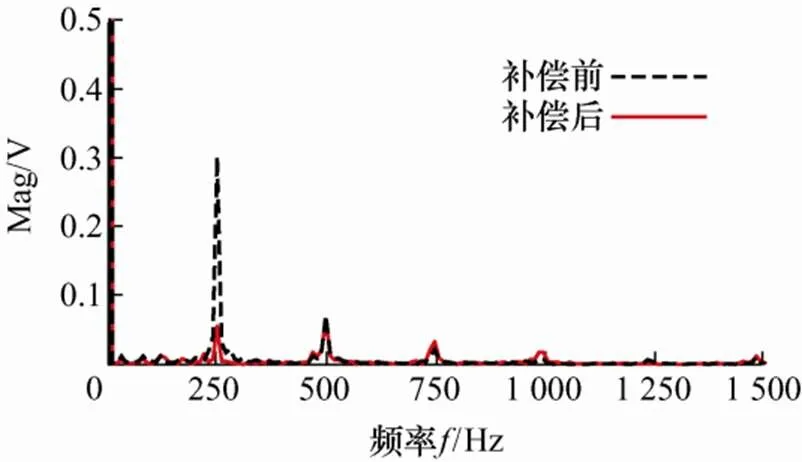
图14 补偿前/后q轴电压FFT分析结果
由以上仿真可见,在线死区补偿方法能够通过迭代计算准确辨识死区大小。死区补偿后,有效消除了、电压畸变,从根本上抵消了死区产生的不利影响。
5 试验结果与分析
搭建永磁同步电机驱动控制平台,以DSP为主控芯片,型号为TMS30F28075。逆变器中的开关管型号为英飞凌FS100R07N3E4,试验电机的参数如表4所示。

表4 死区效应对αβ轴电压的影响
试验中母线电压为60 V,由于在转速较高时死区导致的电流畸变较小,因此试验中给定转速200 r/min。设置死区时间1 μs,查阅数据手册得到开关管T=0.08,T=0.29。PWM频率为10 kHz。给予一定负载,此时i=0.8 A。
以0.05 s为周期进行Δ计算,图15为在线辨识Δ结果,经历接近1 s后收敛于1.4 V附近。

图15 Δv辨识结果
补偿前后的u和u如图16和图17所示,可见u波形由锯齿状变为直线,u波形与由波浪状变为直线,且幅值有所降低,效果与仿真相近。

图16 死区补偿前/后的d轴电压

图17 死区补偿前/后的q轴电压
补偿前后的A相电流波形如图18和图19所示。补偿后电流恢复正弦形状。

图18 死区补偿前的A相电流

图19 死区补偿后的A相电流
综上,在线死区补偿方法能够在线辨识死区大小,补偿后能够有效消除电压、电流谐波。
6 结论
(1) 针对PMSM驱动系统中逆变器的死区效应,提出一种基于直轴电压分析的死区补偿策略。该方法能够在线辨识出死区的大小,通过前馈电压补偿的方式抵消死区影响。
(2) 仿真和试验表明该死区补偿方法能够有效消除、轴电压谐波,从根本上消除死区的影响。
(3) 该方法不需要添加额外的硬件,软件也很容易实现,具有较高的应用价值。
[1] 赵录杰,段晶晶,贺雅琦,等. 浅谈永磁电机伺服控制系统的控制策略研究[J]. 中国新通信,2019,21(12):228.
ZHAO Lujie,DUAN Jingjing,HE Yaqi,et al. Research on control strategy of permanent magnet motor servo control system[J]. China New Telecommunications,2019,21(12):228.
[2] 张立伟,郑丽娜,宋立群,等. 采用扩展卡尔曼滤波器对PMSM死区补偿的方法[J]. 北京交通大学学报,2019,43(2):93-99.
ZHANG Liwei,ZHENG Lina,SONG Liqun,et al. Extended Kalman filter is used to compensate PMSM dead zone[J]. Journal of Beijing Jiaotong University,2019,43(2):93-99.
[3] 张成宝,苏阳,周中坚. 电动助力转向电机控制系统死区效应研究[J]. 电机与控制应用,2020,47(6):70-75.
ZHANG Chengbao,SU Yang,ZHOU Zhongjian. Research on dead zone effect of electric power steering motor control system[J]. Electric Machines and Control Application,2020,47(6):70-75.
[4] 冯振东,张力平,周浩,等. 基于干扰观测器的逆变器在线死区补偿[J]. 机电工程技术,2020,49(2):175-178.
FENG Zhendong,ZHANG Liping,ZHOU Hao,et al. Online deadzone compensation of inverters based on disturbance observe[J]. Mechanical and Electrical Engineering Technology,2020,49(2):175-178.
[5] 张志刚,李腾,杜劭琨,等. 基于死区补偿的PMSM转矩脉动抑制研究[J]. 控制工程,2021,28(6):1108-1114.
ZHANG Zhigang,LI Teng,DU Shaokun,et al. Research on torque ripple suppression of PMSM based on dead zone compensation[J]. Control Engineering,2021,28(6):1108-1114.
[6] SHIM J,CHOI H,HA J I. Zero-sequence current suppression with dead-time compensation control in open-end winding PMSM[C]//2020 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE,2020:3051-3056.
[7] 魏佳丹,薛嘉成,周波,等. 四桥臂变换器驱动开绕组永磁同步电机系统的死区效应分析与抑制[J]. 电工技术学报,2018,33(17):4078-4090.
WEI Jiadan,XUE Jiacheng,ZHOU Bo,et al. Analysis and suppression of dead zone effect in open-winding permanent magnet synchronous motor driven by four-bridge arm converter[J]. Transactions of China Electrotechnical Society,2018,33(17):4078-4090.
[8] 沈凤龙,满永奎,王建辉,等. 变换器死区补偿方法[J].辽东学院学报,2016,23(3):192-198.
SHEN Fenglong,Man Yongkui,WANG Jianhui,et al. Compensation method of converter dead zone[J]. Journal of Liaodong University,2016,23(3):192-198.
[9] WANG Y,GAO Q,CAI X. Mixed PWM for dead-time elimination and compensation in a grid-tied inverter[J]. IEEE Transactions on Industrial Electronics,2011,58(10):4797-4803.
[10] 韩坤,孙晓,刘秉,等. 一种永磁同步电机矢量控制SVPWM死区效应在线补偿方法[J]. 中国电机工程学报,2018,38(2):620-627,692.
HAN Kun,SUN Xiao,LIU Bing,et al. An on-line compensation method for dead-time effect of vector control SVPWM of permanent magnet synchronous motor[J]. Proceedings of the CSEE,2018,38(2):620-627,692.
[11] 刘栋良,贺益康. 交流伺服系统逆变器死区效应分析与补偿新方法[J]. 中国电机工程学报,2008,28(21):46-50.
LIU Dongliang,HE Yikang. A new method for analysis and compensation of dead-time effect of AC servo system inverter[J]. Proceedings of the CSEE,2008,28(21):46-50.
[12] 闫博,王家军. 基于时间方法的电压源逆变器死区补偿研究[J]. 杭州电子科技大学学报,2021,41(3):43-50.
YAN Bo,WANG Jiajun. Research on dead time compensation of voltage source inverter based on time method[J]. Journal of Hangzhou Dianzi University,2021,41(3):43-50.
[13] LI Y S,WU P Y,HO M T. Dead-time compensation for permanent magnet synchronous motor drives[C]//2020 International Automatic Control Conference (CACS). IEEE,2020:1-6.
[14] 陈令云. 基于空间矢量脉宽调制的死区补偿方法研 究[J]. 机械制造,2019,57(12):29-31,44.
CHEN Lingyun. Research on dead-time compensation method based on space vector pulse width modulation[J]. Mechanical Manufacturing,2019,57(12):29-31,44.
[15] CHEN W,LI B,XU D,et al. A dead-time compensation method for voltage source inverters[C]//2019 22nd International Conference on Electrical Machines and Systems (ICEMS). IEEE,2019:1-6.
Dead Zone Compensation Strategy for Inverter of PMSM Based on Direct Axis Voltage Analysis
YU Jiawen ZHU Pengcheng XU Yongxiang
(School of Electrical Engineering and Automation, Harbin Institute of Technology, Harbin 150001)
The dead-zone effect will lead to the output voltage distortion of the inverter, so that the actual output voltage controlled by the PMSM SVPWM will not be equal to the reference voltage, which reduces the control performance. The inverter dead-zone effect of synchronous motor drive system is analyzed, the mathematical model of the output voltage including the dead-zone effect is established, and a dead-zone compensation strategy based on direct-axis voltage analysis is proposed. The size of dead zone can be identified online by analyzing voltage harmonics,then the feed forward voltage can be compensated according to the mathematical model. This method doesn’t need additional hardware, and is simple to implement. Simulation and experiment show that the method can effectively eliminate the voltage and current harmonics caused by the dead zone.
Permanent magnet synchronous machine;deadtime compensation;inverter
10.11985/2021.04.007
TM561
20210629收到初稿,20210928收到修改稿
于家文(通信作者),男,1997年生,硕士研究生。主要研究方向为电机及其控制。E-mail:1095383503@qq.com
朱鹏程,男,1998年生,硕士研究生。主要研究方向为永磁同步电机控制。E-mail:437216072@qq.com
徐永向,男,1977年生,教授,博士研究生导师。主要研究方向为特种环境永磁电机及其控制等。E-mail:xuyx@hit.edu.cn
