三平移刚柔混合并联机构优化设计与动力学分析
2021-02-14时宽祥沈惠平段恩业
朱 伟 时宽祥 王 烨 沈惠平 段恩业
(常州大学机械工程学院, 常州 213164)
0 引言
绳驱动并联机构[1](Cable-driven parallel mechanisms, CDPMs)是一种用绳索驱动代替刚性杆驱动的并联机构,它具有工作空间大、运动速度快、承载能力强、柔顺性好等特点。绳驱动并联机构CDPMs可分为欠约束CDPMs(n
相比刚性并联机构,CDPMs虽有上述诸多优点,但同时存在绳索张力不足、刚度较差[9]等缺点。为了改善绳驱并联机构的力学性能,BEHZADIPOUR等[10]提出通过增加刚性杆来改善CDPMs刚度,并通过构建等效弹簧的方法建立机构的刚度矩阵,结果表明这种方式可有效提高CDPMs的结构刚度。ZHANG等[11]在3自由度平行绳结构的CDPM中增加了一条中间弹性支链,不仅提高了绳索张力,使机构各组绳索在运动中分别保持平行,而且改善了机构运动性能。BEHZADIPOUR等[12]提出了一种类似“可变脊椎”的结构,用来提高CDPMs中的绳索张力。然而,在大多数CDPMs中,驱动绳索对动平台通常都存在力矩作用,给机构分析带来较大难度,GOSSELIN等[13]发明了空间交叉绳系(Crossing cables)结构,绳索拉力对动平台的合力矩为零,大大简化了力学分析难度,而且这种构型不会发生绳索干涉现象[14],又增加了绳驱并联机器人的可达工作空间,具有很好的推广应用价值。
本文提出一种3自由度绳驱并联机构,在绳系为同组平行异组交叉的CDPMs基础上,增加一被动弹性支链,分析机构的运动学方程、可达工作空间和任务工作空间;在动平台具有高加速度的前提下,以驱动绳索的驱动力为优化目标对弹簧参数进行优化;建立拉格朗日动力学方程,通过和期望运动轨迹对比,验证其正确性和合理性。
1 机构设计
机构原理如图1a所示,由静平台、动平台以及连接于二者之间的3组平行绳索(6根绳索)和中间弹性可伸缩支链组成。3组平行绳索一端(绳①、②为组1,绳③、④为组2,绳⑤、⑥为组3)穿过固定在静平台上的3组导向套A1A2、A3A4、A5A6上,同组平行绳索另一端连接于动平台的圆周上,连接点分别记为B1和B2、B3和B4、B5和B6,且B1B2、B3B4、B5B6的连线均经过动平台圆心O,两两之间的夹角为60°,如图1b所示。中间弹性可伸缩支链两端分别通过U副连接于静、动平台中心点O和点P,该支链可以看作SPS型弹性支链(S表示球副,P表示移动副)。由于弹簧作用,中间支链始终处于被压状态,3组平行绳索则保持张紧,它们与静、动平台的连接点构成了平行四边形结构A1A2B1B2、A3A4B3B4、A5A6B5B6。因此,动平台在运动中姿态保持不变,即机构只能实现三平移运动,故记为3T绳驱机构(T表示移动副)。
机构结构设计如图1b和图2所示。驱动电机位于A2i-1A2i(i=1,2,3)的中间位置Ci(i=1,2,3)处,电机带动绞盘旋转从而同时驱动两根平行绳索A2i-1B2i-1和A2iB2i运动,如图2b所示。中间弹性可伸缩支链由移动杆、导向杆和安装于两者之间的弹簧组成,刚性杆不仅有导向作用,还可以限制弹簧的伸缩范围,其结构如图2c所示。绳索布置方式采用同组平行、异组交叉的结构,如图2d所示。
2 运动学分析
2.1 位置与速度分析

如图3所示,在静平台中心点O建立机构的固定坐标系Oxyz,OC1方向为固定坐标系的x轴正方向,Oxyz的z轴正方向为垂直向下。由于机构只存在空间三平移运动,动平台中心点P的位置在固定坐标系中可表示为
p=lOP=(x,y,z)
(1)
由于机构中6绳索构成3组平行绳索,所以对机构进行运动分析时,可以将每组平行绳索分别简化成一条由点P到点Ci之间的虚拟的中间绳索,如图3所示,记lPCi=ρi(i=1,2,3),则ρi=lB2i-1A2i-1=lB2iA2i。
根据封闭矢量原理可建立机构位置方程
p=ci-ρi(i=1,2,3)
(2)
式中ci——第i个电机Ci(绞盘)在固定坐标系中的位置矢量
根据图1b可知
(3)
其中
c1=[R0 0]T
式中R——静平台基圆半径
R1、R2、R3——固定坐标绕z轴转动的变换矩阵,旋转角分别为0°、-120°和120°
将式(3)代入式(2)可得运动方程
Ric1-p=ρi
(4)
所以3T绳驱机构的位置方程为
‖Ric1-p‖=‖ρi‖ (i=1,2,3)
(5)
设被动弹性支链p的单位向量和第i组虚拟中间绳索矢量ρi的单位向量分别为up和ui,则up=p/‖p‖,ui=ρi/‖ρi‖。将式(2)两边对时间求导可得
(6)
式中ρi——第i组中间绳索矢量ρi的长度
对式(6)两边点乘单位向量ui,进一步得到各组绳索的速度为
(7)
因为6条绳索构成3组平行四边形绳索结构,所以绳索速度和动平台速度可以表示为
(8)
J——机构雅可比矩阵
2.2 工作空间分析
绳索并联机构在运动过程中弹簧一直处于被压缩状态(保持弹性),但弹簧被压缩量有限。通常情况下弹簧最大压缩量不超过初始长度的50%[15],则中间弹性可伸缩支链的长度p的范围为
pmin≤p≤pmax
(9)
其中
pmin=0.5LS+Spmax=LS+S
式中pmin、pmax——中间弹性可伸缩支链的最小和最大长度
LS——弹簧初始长度
S——导向杆长度,如图2c所示
考虑到中间弹性支链的尺寸以及球铰的约束,设弹性支链的摆动范围为[-π/4,π/4],动平台最大运动空间的几何形状如图4所示。对于CDPMs,其工作空间的确定还要考虑驱动绳索是否受拉。设每条绳索的拉力为tj(j=1,2,…,6),因同组平行绳索中两绳索的拉力相同,故3组平行绳索的等效拉力矢量可表示为Ti=Tiui=2t2i-1=2t2i(Ti为第i组平行绳索的拉力,i=1,2,3),由于绳索只能承受单向力,所以机构在工作空间内任意位置时,各组绳索的拉力Ti必须为正(方向同ui),否则该位置点不在机构的工作空间内[16]。如图5所示,机构动平台同时受到3组平行绳索的等效拉力Ti、中间支链弹性力Fk和动平台重力G的作用,弹簧弹力沿着中间支链向下。根据静力平衡原理建立动平台力平衡方程
T1+T2+T3+Fk+G=0
(10)
其中
Fk=k(LS+S-p)upG=mg
式中m——动平台质量
g——重力加速度向量
k——弹簧弹性系数
绳索拉力Ti、弹簧弹力Fk和动平台重力G在空间中汇交于动平台的质心点P,且构成封闭矢量,由文献[17]可知,只要弹簧弹力Fk向下(弹簧受压),则式(10)中各组绳索拉力Ti都一定平行于第i组绳索且方向向上,即拉力为正。所以,机构可达工作空间[18]的几何形状如图5所示。
考虑到实际应用,设定动平台的任务工作空间[17]几何形状为一规则的圆柱体,如图5所示。设该圆柱体直径D与高H的比为4∶1,则可建立几何关系
(11)
联立式(9)、(11)可得
(12)
设当中间支链与固定坐标系Oxyz的z轴重合,且动平台位于任务工作空间的下底面时,动平台对应的位置为机构的初始位置,对应的高度为初始高度h,且由图4a可知h为
h=pmin+H
(13)
基于以上分析可知,绳索拉力、机构可达工作空间、任务工作空间与中间支链的长度p有关,而中间支链的长度p又取决于弹簧的初始长度LS。
3 中间支链优化设计
3.1 参数优化
为了满足高加速度及一定的任务工作空间的要求,机构弹簧参数确定需要同时从3方面来考虑:① 绳索拉力必须大于等于允许最小张力fmin。② 保证机构在具有高加速度的状态下,驱动绳索的驱动力较小,能量消耗较小。③机构能够达到期望的任务工作空间。需要注意的是,动平台在高速运动时,由于机构存在弹簧,所以会产生弹性振动,进而影响机构的运动精度和稳定性。为了减轻弹簧的弹性振动,一方面设计弹簧直径与刚性移动杆的直径近乎相等;另一方面,弹簧在机构工作过程中始终处于被压状态。由前面的分析可知,中间弹性支链不仅影响动平台的工作空间,而且支链中的被压弹簧对机构的绳索张力、加速度及驱动力都有很大的影响。若中间支链中导向杆长度S已确定,则弹簧就决定了中间支链结构,而影响弹簧特性的主要有两个参数:弹性系数和初始长度。
根据机构结构,设置机构部分参数如表1所示。
设弹簧弹性系数和初始长度分别为k和LS,根据达朗贝尔原理求得绳子拉力需满足

UT=maε-Fk-mg (14)
其中U=[u1u2u3]T=[T1T2T3]T
式中T——绳索拉力向量
a——动平台(质心)加速度
ε——动平台加速度方向的单位矢量
因为u1、u2、u3为线性无关的列向量,所以U存在逆矩阵U-1,则绳索拉力可表示为
T=U-1(maε-Fk-mg)
(15)
由机构位置方程式(2)、(3)可得
ρ1u1+ρ2u2+ρ3u3=(c1+c2+c3)-3p=-3p
(16)
两边同时点乘Fk后,整理可得
-3U-1Fkpup=[Fkρ1Fkρ2Fkρ3]T
(17)
其中
Fk=k(LS+S-p)
将式(17)代入式(15)可得
(18)
由式(18)可求T的分量Ti为
(19)

(20)
对式(20)两端所表达的集合取并集,即可得到当机构在工作空间内运动加速度为a时,绳索可能的最小和最大拉力为
(21)
(22)

(23)
将式(23)所表达的动平台位置在任务工作空间中表示,如图6所示。
当给定动平台一个加速度,则绳索驱动力与弹簧参数的关系可以由式(2)、(3)和式(19)~(22)确定。为了使机械手能够高速运动,设式(14)中动平台任意方向的加速度为5g。当动平台在任意位置的任意方向都具有5g加速度时,则被动弹性支链中弹簧弹性系数k、初始长度LS和绳索驱动力Tmin、Tmax之间的关系如图7所示。
设定本机构中每组平行绳索的最小张紧力fmin为10 N,因为绳索必须处于张紧状态,即拉力不小于最小张紧力,所以弹簧的参数必须在Tmin≥10 N的区域中选择。从图7可以看出,同一初始长度(弹性系数)下,Tmin/Tmax等值线的值越大,绳索拉力就越大,即所需要驱动力越大,所以选择Tmin=10 N的等值线。此时,绳索在满足最小张力的条件下,动平台达到加速度5g所需要的绳索最小驱动拉力为10 N。在Tmin=10 N的等值线上,若初始长度LS选择越大,则绳索拉力的最大值Tmax就越大,即所需要绳索的驱动拉力越大。从式(12)可知,若初始长度LS减小,则机构的任务工作空间就会缩小。考虑到机构的实际应用,设定期望的任务工作空间的高度H≥0.25 m,则弹簧初始长度必须满足LS≥0.56 m。因此综合考虑,弹簧初始长度LS可选为0.6 m,此时弹簧弹性系数k为1 300 N/m,如图7所示。从图7可以看出,当LS=0.6 m、k=1 300 N/m,若动平台在工作空间内以加速度5g运动时,绳索的驱动力(拉力)的最小值和最大值分别为10 N和280 N。此时,由式(13)可得,机构初始高度h为0.95 m。图8为弹簧参数优化设计流程图。
3.2 性能估计与验证

(24)
式中,Tmin=10 N。
将上面优化后的弹簧参数LS、k和初始高度h代入式(24),可以得到动平台的加速度a为
(25)
(26)
式中,Tmax=280 N。
此时,动平台对应的加速度a为
(27)
根据上述优化结果,选取弹簧参数:LS=0.6 m,k=1 300 N/m,且每组绳索拉力Ti=10 N和Ti=280 N时,机构在工作空间内任意位置的加速度,结果如图9所示。从图9可以看出,在驱动绳索拉力为10 N和280 N时,机构动平台的最大加速度分别为288.6 m/s2和217.4 m/s2,最小加速度分别为50.4 m/s2和49.7 m/s2。显然,优化后弹簧参数使动平台加速度达到期望的5g加速度,可以实现高速运动。由此,可以认为弹簧参数的优化方法和结果合理。机构参数分别为k=1 300 N/m,LS=0.6 m,h=0.95 m。
4 动力学分析
4.1 动平台动力学模型
在CDPMs中,3T机构主要有动能和势能两种能量,可以考虑采用拉格朗日方法建立动平台的动力学模型。动平台质量为m,轻质刚性伸缩杆质量为mr,绳索质量忽略不计,建立如图3所示的坐标系。根据拉格朗日法,建立机构动力学方程为
(28)
其中L=Ek-Ep
式中q——广义坐标向量
L——拉格朗日函数Ek——机构动能
Ep——机构势能(包括重力),取Oxy平面是零势能面
Q′——广义坐标对应的广义力向量(非保守力引起的)
根据图2、3,推导得基于广义坐标q的机构动能和势能为
(29)
(30)
则拉格朗日函数L为
(31)
求解广义力的方法有矢量定义法和广义虚位移法,这里采用后者。由虚位移原理求解广义力为
(32)
式中qj——机构第j个广义坐标
Q′j——非保守力对应于qj的广义力
δW——绳索拉力所作的虚功
将q1=x,q2=y,q3=z代入式(32)得
∑δW=Q′1δx+Q′2δy+Q′3δz
(33)
因为δqj具有任意性,所以设δx≠0,δy=δz=0,则机构绳索拉力所作的虚功为
∑δW=T1δx+T2δx+T3δx
(34)
即Q′1δx=T1δx+T2δx+T3δx
(35)
则由式(35)可计算
(36)
同理,分别设δy≠0,δx=δz=0和δz≠0,δx=δy=0,则有
Q′2δy=T1δy+T2δy+T3δy
(37)
Q′3δz=T1δz+T2δz+T3δz
(38)
将式两边分别同除以δy和δz可得
(39)
(40)
式中Q′1、Q′2、Q′3——广义向量Q′中的元素
i、j、k——笛卡尔坐标系的x、y、z轴的单位矢量
U1、U2、U3——U的第1、2、3行元素
根据3T绳驱机构工作空间的几何关系,可得到广义坐标向量q的范围为
Nl≤qT[ijk]≤Ml
(41)
其中

将式(31)、(36)、(39)、(40)代入式(28)可得
(42)
将式(42)改写成矩阵形式,并联立式(41)即可得动平台的动力学模型为
(43)
Q=[-Q′1-Q′2-Q′3-mg-mrg/2]
4.2 仿真验证与分析
在机构的动力学模型中,机构参数如表1所示。设动平台期望轨迹方程为
(44)
由式(44)可知,动平台的期望运动为空间运动:动平台先由初始位置z=0.95 m垂直向上运动至z=0.8 m处,停滞0.2 s再沿x轴正方向水平运动0.2 m,再停滞0.2 s后在该水平面上作半径为0.2 m的圆周运动。
已知动平台的运动轨迹求驱动力是动力学反解问题[20]。将动力学模型式(43)的Matlab数值计算结果和ADAMS的虚拟样机仿真结果进行对比,结果如图10所示。由图10可以看出,Matlab数值计算结果与ADAMS仿真结果基本一致,验证了动力学模型的正确性。
5 试验
基于中间支链结构优化后的结果,设计并搭建了3自由度绳驱动并联机构的试验样机(图11)。
在抓取、分拣等领域中,绳驱并联机器人的主要操作就是在机器人可以达到的三维空间中,实现某一点到另一点的抓取和放置操作(Pick and place operations,PPO)[21],故假设动平台期望轨迹为“门”字形轨迹,包括拾取、搬运、放置三过程,如图12所示。其中,设定6个路径点,记为Nh(h=1,2,…,6);表2为它们的坐标位置。为实现这一轨迹,动平台需依次完成上升阶段N0N2、水平运动阶段N2N4以及下降阶段N4N6。
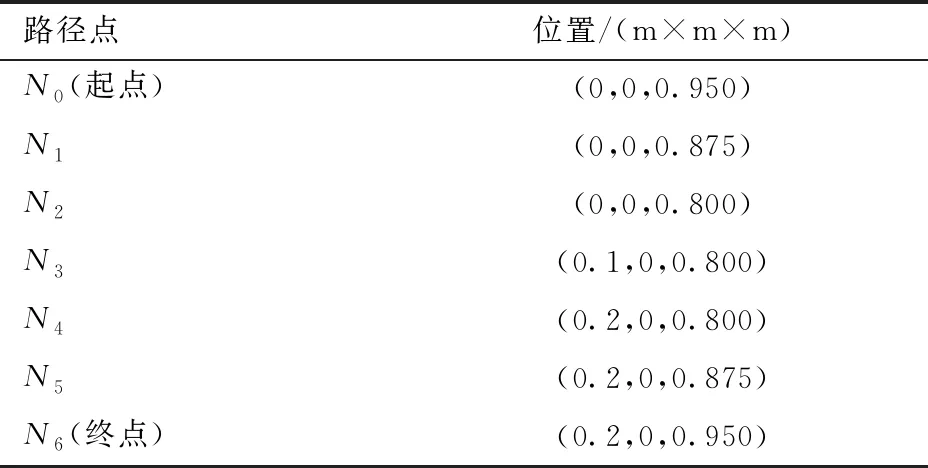
表2 “门”轨迹中各路径点的位置Tab.2 Position of each path point in track like character door
当动平台轨迹已知时,可通过式(4)计算出各组绳索长度ρi的理论值;在绳索驱动并联机构的实验样机中,测出动平台运动至各路径点Nh时,各组绳索长度ρi的实际值,其结果如图13所示。由图13可以看出,各组绳索长度ρi的理论值和测量值基本吻合。因此,可以证实机构运动学方程的建立是正确的。
6 结论
(1)提出一种由3组平行绳索和一条被动弹性支链组成的绳驱并联机械手机构,该机构不仅可以提高绳索张紧力和机构刚度,还能使机构具有较高加速度,实现高速运动。
(2)在机构具有高加速度的条件下以驱动绳索的驱动力为优化目标对弹簧做了参数优化,最终得到了弹簧参数与绳索拉力之间的关系;从而为机构的优化设计提供合适的性能指标。
(3)采用拉格朗日法对机构进行了动力学建模,得到了动平台的动力学方程,并利用Matlab和ADAMS软件进行动力学仿真,得到了绳索的驱动力曲线,验证了动平台的运动轨迹;最后,基于优化结果设计了样机,并证实了建立的机构运动学方程是正确的。
