下肢外骨骼创新仿生设计及承载性能分析
2021-02-12赵新华杨玉维郑晓博
赵 瀚,赵新华,杨玉维,李 彬,郑晓博
(天津理工大学 天津市先进机电系统设计与智能控制重点实验室,天津300384)
膝关节的骨性关节炎是一种常见于中老年人,尤其是较为肥胖的中老年人的疾病。随着我国人口老龄化的趋势不断发展以及居民肥胖率的不断上升,膝关节的骨性关节炎的发病率也在不断攀升,预防和治疗膝关节的骨性关节炎变得更为重要。膝关节的骨性关节炎的诱因主要有个体衰老、遗传因素以及膝关节长时间受力过度。合理设计的下肢外骨骼可以减少膝关节载荷,使其受力保持在合理范围进而达到有效预防和治疗膝关节的骨性关节炎的目的[1]。
下肢外骨骼可分为助力型外骨骼和康复型外骨骼。助力型外骨骼主要用来增强人体力量,辅助人负重行走,较为典型的就是伯克利下肢外骨骼(Berkeley lower extremity exoskeleton,BLEEX)[2-4],该外骨骼是一种助力型负重下肢外骨骼,其采用液压驱动增强单兵力量,提高单兵负重能力。混合辅助肢体(hybrid assistive leg,HAL)[5-6]也是一种助力型外骨骼,其采用盘式电机和谐波减速器作为驱动机构,用于帮助腿部无力的使用者完成行走、爬楼等运动。哈尔滨工业大学开发的下肢助力外骨骼可负重30 kg[7]。康复型外骨骼主要用于对脑卒中和下肢损伤患者的康复训练。步态复建系统(Lokomat)悬挂式康复训练外骨骼系统[8-10],可以实现主动训练与被动训练。再行走(ReWalk)下肢支撑式外骨骼康复机器人[11],利用传感器感知身体的重心变化而驱动下肢行走。张佳帆等[12-13]研制的下肢外骨骼康复系统,可以预判人体运动趋势从而使外骨骼拟合下肢的运动。
上述下肢外骨骼大多考虑增强人体力量与辅助行走,不涉及外骨骼对人体膝关节所受的运动载荷的分承问题。为了实现外骨骼分承膝关节运动载荷,减少膝关节在人体行走过程中所受内力的目标,本文设计了一种具有自适应变刚度机制的下肢外骨骼,通过对外骨骼转动部分进行动力学分析和参数优化,验证了下肢外骨骼设计的合理性,为今后下肢外骨骼的研发奠定基础。
1 下肢外骨骼结构设计
1.1 设计准则与结构设计
系统的结构设计是系统发挥作用的前提,本膝关节外骨骼的结构设计主要考虑以下几个方面:
1)穿戴舒适性。在人体行走过程中由于腿部肌肉的伸缩会导致腿部直径在步态周期内有规律地变化,合理设计腿部人机交互装置可以提高穿戴舒适度。
2)膝关节运动匹配包容性。人体的胫骨与股骨的接触面在下肢屈伸的过程中既有滚动又有滑动,这使得膝关节在矢状面的转动瞬心会随着下肢屈伸的角度而改变,膝关节转动瞬心呈J形曲线[1]。膝关节外骨骼设计需满足外骨骼旋转瞬心与膝关节瞬心有较高的拟合度,且需满足因个体不同导致的膝关节几何差异。
3)载荷传递和灵活运动的兼容性。人体在步态周期的不同阶段对下肢外骨骼的承载需求不同,下肢外骨骼在支撑相具有较高的刚度,在摆动相具有较低的刚度。
矢状面是指将人体纵切为左右两部分的切面,人体的基本面如图1所示。人体在行走的过程中,膝关节主要在矢状面内做屈伸运动,所以本下肢外骨骼的膝关节部分及踝关节部分均设计为只在矢状面内做旋转运动的机构。本下肢外骨骼主要包括分别附着在左右下肢的两条机械腿,且左右对称,所以下文主要对单侧结构进行描述。图2所示为下肢外骨骼结构,本文设计了一种带有智能张紧功能的自适应变刚度体外膝关节装置[14],其中腰部固定装置起固定智能张紧物理交互装置的作用,防止整个机构纵向下滑,使外骨骼穿戴在合理的位置。针对穿戴舒适性的需求,智能张紧物理交互装置在人体行走的过程中通过张紧带随着腿部径向尺寸的变化而伸缩从而提高穿戴的舒适度与穿戴时间长度。针对膝关节运动匹配包容性的要求,下肢外骨骼的膝关节转动部分采用5杆机构变刚度膝关节装置,在人体步态周期不同阶段呈现不同刚度,以适应人体对体外膝关节外骨骼承载与运动灵活性的需求。

图1 人体的基本面Fig.1 Fundamental sections of the human body
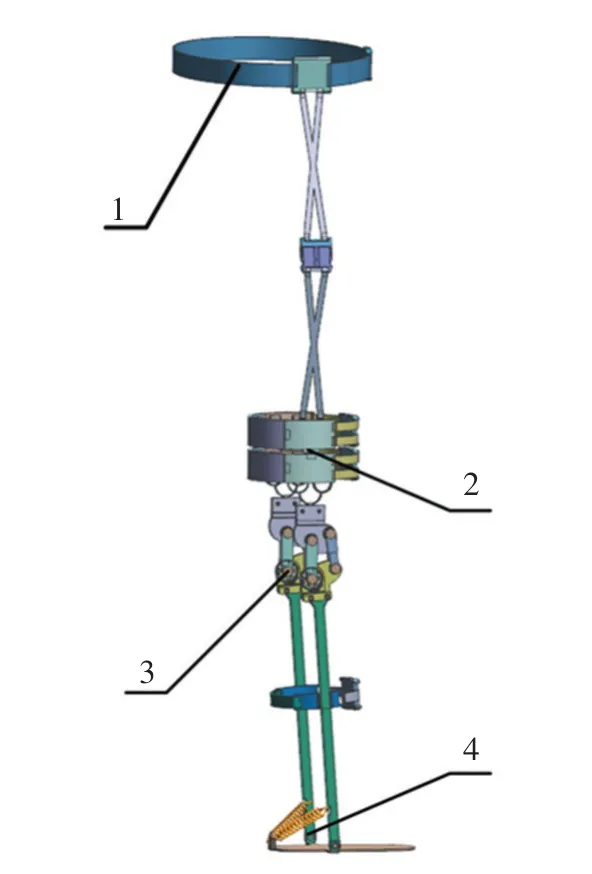
图2 下肢外骨骼结构Fig.2 Lower extremity exoskeletal structure
1.2 大腿智能张紧物理交互装置
大腿智能张紧物理交互装置如图3所示,为了适应人体大腿在股骨轴向方向上的直径变化,智能张紧物理交互装置中的大腿加强环板设计为上下两部分,上下大腿加强环板上的张紧电机随着感知的实时步态而旋转带动张紧杆旋转,进而使卷绕在张紧杆上的张紧线及张紧带张紧或放松,张紧时增加人体与体外膝关节的接触刚度,实现负载传递,松弛时降低软组织上的压力,提高穿戴的舒适度与穿戴时间长度。

图3 大腿智能张紧物理交互装置Fig.3 Thigh smart tensioning physical interaction device
1.3 变刚度膝关节装置
人体膝关节是人体最复杂的关节之一,膝关节在屈伸的过程中在矢状面的转动瞬心呈J形曲线,传统下肢外骨骼的膝关节转动副为单自由度铰链,其与膝关节真实瞬心的拟合度较低,严重影响外骨骼穿戴的舒适度。优化杆长后的4杆机构可以拟合人体膝关节的理想瞬心J形曲线[15]。但对于杆长固定的4杆机构,其转动瞬心曲线也是固定的,无法适应不同个体的膝关节尺寸差异。
变刚度膝关节装置如图4所示,在传统4杆机构的基础上,下肢外骨骼的膝关节转动部分将其中一杆替换为两个由移动副连接且两杆之间加入弹簧的杆件,膝关节转动部分可视为含有弹性移动副的5杆机构,增大了外骨骼中膝关节部分的工作空间,使外骨骼实现对因个体不同导致的膝关节几何差异与膝关节的轻微移动补偿,从而避免体外膝关节与人体膝关节间的非期望交互力的产生。此外,外骨骼的膝关节部分还采用了变刚度机制,在支撑相阶段刹车块制动弹簧托盘,弹簧使前杆下端运动副刚度增大,此时外骨骼膝关节部分刚度增大,在摆动相阶段刹车块远离弹簧托盘,前杆下端运动副刚度变为0,此时外骨骼中膝关节部分运动刚度减小。刹车块的制动或放松协同智能张紧装置满足人体在步态不同阶段对下肢外骨骼的承载和关节灵活性的需求。

图4 变刚度膝关节装置Fig.4 Variable stiffness knee joint device
1.4 踝关节装置
踝关节装置如图5所示,采用铰链式单轴关节设计,足底板采用弹性材料,能够增加外骨骼的踝关节灵活性,并在踝关节跖屈方向提供一定的弹性助力。足底板后部与外骨骼下肢由助力弹簧连接,助力弹簧在踝关节背曲时被拉伸蓄能,在踝关节跖屈时收缩做功,由此达到辅助人体踝关节在行走过程中运动的目的。

图5 踝关节装置Fig.5 Ankle joint device
2 运动分析
人体步态主要分为两个阶段,分别是支撑相阶段和摆动相阶段,支撑相阶段约占60%,摆动相阶段约占40%,其中支撑相阶段是人体膝关节承受载荷最大的阶段,行走过程中膝关节承受载荷最高可达人体重力的3倍[1]。若下肢外骨骼能够有效减少支撑相阶段人体膝关节承受载荷,则可以在人体行走的整个步态周期内起到良好的分承作用。
图6 所示为重力支撑模型,其中fh为佩戴下肢外骨骼后人体膝关节所受载荷,fl为下肢外骨骼的膝关节所受载荷,BW为未佩戴下肢外骨骼时人体膝关节所受载荷,m为外骨骼附着于大腿部分的质量。验证下肢外骨骼在支撑相阶段有良好的分承作用,即佩戴下肢外骨骼后人体膝关节所受载荷fh与未佩戴下肢外骨骼时人体膝关节所受载荷BW的比值较低。重力支撑模型的数学公式为:

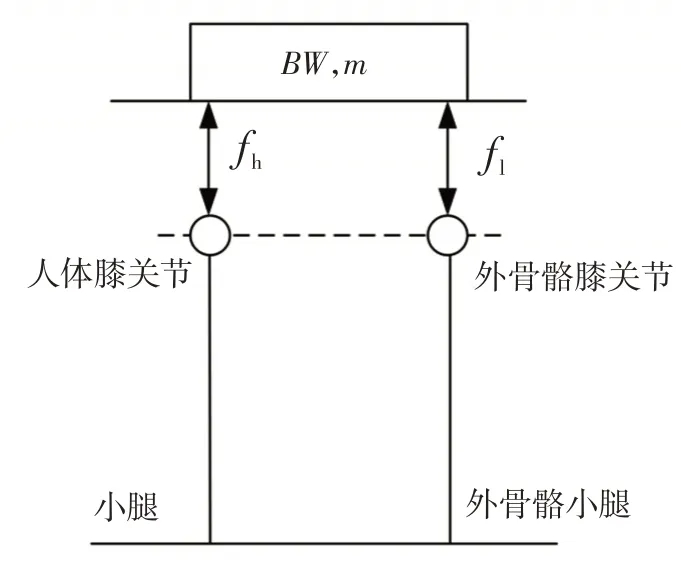
图6 重力支撑模型Fig.6 Gravity support model
外骨骼的膝关节转动部分的结构简图如图7所示,在支撑相阶段,刹车块制动弹簧托盘,杆AB与杆AE之间转动副刚度变大,机构为二自由度欠驱动机构,杆CD间加入的弹簧X弥补了部分的动力学约束。

图7 外骨骼的膝关节转动部分的结构简图Fig.7 Structural sketch of theexoskeleton kneejoint rotation section
根据结构简图可得机构的位置方程

式中,x为弹簧X的长度。
式两端对时间t求导,可得如下公式为:

拉格朗日法是机器人动力学建模常用的方法,不需要求出机构杆件的内作用力。把系统的拉格朗日函数L定义为系统的动能K和势能P之差,即
系统的动力学方程为:
式中,qi为表示动能和势能的坐标,q˙i为与之对应的速度,Fi为作用在第i个坐标上的力,n为连杆数目。
各构件的重心坐标表达式为:
式中,xsi和ysi分别对应杆AB、BC、CD、DE的质心横纵坐标,xs5和ys5为弹簧X的横、纵坐标。
各构件的重心加速度表达式为:

选取θ1,x为两个互相独立的广义坐标,记为q1=θ1,q2=x。通过计算可得系统的总动能K和总势能P分别为:

式中,g为重力加速度,k1为弹簧X的弹性系数,a为弹簧X的初始长度,k2为弹簧组内每个弹簧的弹性系数,r为A点到弹簧组内弹簧轴线的距离,其为20 mm,

由上可得系统的动力学方程为:

以上公式中,T1为杆AB所受外部驱动力矩,T2为弹簧X所受外部驱动力矩且其值为0。
3 承载能力验证及优化
图8 所示为人体支撑相膝关节轴向载荷及屈伸角度,图9所示为LAB满载所受等效力矩T。中国成年男子平均体重66.2 kg,成年女子平均体重57.3 kg,本文采用66.2 kg为标准体重,下肢外骨骼附着于大腿部分的质量约为1.5 kg,若以上载荷均作用于外骨骼中膝关节,则在支撑相阶段LAB所受等效力矩为:

图8 人体支撑相膝关节轴向载荷及屈伸角度Fig.8 Human support phase knee axial load and flexion-extension angle

图9 LAB满载所受等效力矩TFig.9 Equivalent moment T at full load for LAB

式中,θ5为载荷fl与杆AB之间所夹锐角。
外骨骼的膝关节转动部分为加入了柔性运动副的二自由度欠驱动机构,为求解LAB在支撑相阶段运动实际所受驱动力矩,本文采用张建军等[16]提出的一种动力学数值迭代算法,迭代时间步长为0.02 s,迭代次数n为300次。使用MATLAB对系统进行仿真求解,机构参数如表1所示。k2的值会影响外骨骼的膝关节转动部分的刚度,也会影响LAB驱动力矩T1,为使外骨骼承载人体膝关节的载荷最大,即LAB所需驱动力矩T1与LAB满载所受等效力矩T之差T′最小,需对k2的值进行优选。计算可知T′随着k2增大而单调递减,机构动力学求解及k2优选流程图如图10所示。

图10 机构动力学求解及k2优选流程图Fig.10 Mechanism dynamics solution and k2 optimal flowchart

表1 机构参数Tab.1 Institutional parameters
优化前与优化后LAB所需驱动力矩如图11所示,通过优选计算可得,k2=10 500 N/m时,LAB所需驱动力矩T1与LAB满载所受等效力矩T之差T′达到最小值,T′与T瞬时比值的平均值为36.03%,即穿戴本下肢外骨骼之后相较于未穿戴外骨骼在支撑相阶段膝关节运动载荷可减少63.97%。

图11 优化前与优化后LAB所需驱动力矩Fig.11 Driving torquerequired by LAB beforeand after optimization
4 结论
1)针对人体膝关节的转动瞬心规律及人体在行走过程中在支撑相阶段需要外骨骼提供辅助支撑、摆动相阶段需要外骨骼具有较低刚度的特点,设计了一种带有智能张紧功能的自适应变刚度下肢外骨骼。
2)采用拉格朗日法建立了外骨骼的膝关节转动部分的动力学模型,借助MATLAB对外骨骼变刚度机构中弹簧组内弹簧的弹性系数k2进行优选,仿真验证表明,本下肢外骨骼可起到显著的膝关节载荷分承效果,为进一步的研究提供了基础。
3)由于个体差异造成不同个体存在体重及膝关节尺寸差异,本下肢外骨骼的实际承载效果仍有待实验样机进一步验证。
