基于激光测距的飞机着陆滑行灯靶板自动化校准系统
2021-02-11夏清鹰钟学敏任培武龙良刚李卓隆朱杰
夏清鹰,钟学敏,任培武,龙良刚,李卓隆,朱杰
(航空工业成都飞机工业(集团)有限责任公司,四川 成都 610091)
0 引言
着陆滑行灯是飞机着陆及滑行过程中安全措施系统的重要组成部分[1],尤其是执行夜间任务时,着陆滑行灯工作状态的好坏直接影响飞行员执行相关着陆及滑行操作的效果以及塔台读取飞机着陆及滑跑状态有效信息的准确性[2],因此保证着陆滑行灯工作状态符合要求具有重要意义。安装飞机的着陆滑行灯时,飞机处于与地面水平的状态,将着陆滑行灯照射方向的中心位置调整至位于飞行员正前方90 m处的地面上,这一过程通常被称为“校靶”。由于光的发散性,着陆滑行灯在90 m处形成的光斑很大,再加上周围杂散光的影响,导致完成校靶操作非常困难。且目前国内的校靶工作大多采用人工测量方式,工作效率低、测量误差大、重复性较差,无法满足对着陆滑行灯的高准确度校准要求,亟需研究具有自动定位功能的校准系统来代替纯人工校准[3-4]。
目前激光测距技术的应用已较为成熟[5-12],并已有采用激光测距技术的装置应用于着陆滑行灯校靶领域[13-14],在一定程度上提升了校准的便利性,但这些方法仍然需要进行较多人工操作,自动化程度有待进一步提高[15]。针对上述问题,本文研究并提出了一套飞机着陆滑行灯自动化校靶系统。对该系统的工作原理、装置组成、关键参数进行详细介绍,并开展实际实验验证该方法的可行性,为着陆滑行灯数字化、自动化检测提供重要技术支撑。
1 飞机着陆滑行灯校准分析
1.1 着陆滑行灯校准要求
飞机前起落架双着陆滑行灯的安装如图1所示,为保证着陆滑行灯的照明效果,需对滑行灯进行装机光学调校。两个滑行灯的安装中轴线即飞机的中轴线,在偏航方向上两灯之间的夹角为4°,且照射方向中心对称。在俯仰方向上两灯照射角度为0.5°,在设置的10 m测试距离处滑行灯的照度值应不低于700 lx,并保证灯光照射距离达到90 m。

图1 着陆滑行灯安装校准示意图Fig.1 Schematic diagram of landing taxi light installation and calibration
1.2 着陆滑行灯校准方法分析
飞机着陆滑行灯校准示意图如图2所示,几何关系图如图3所示。机头千斤顶顶块安装中心点与着陆滑行灯发光面距离d0=3.262 m,实际滑行灯高度设为H0,照射最远距离为90 m,测试时靶板距离L0=10 m,靶板高度设为H1。
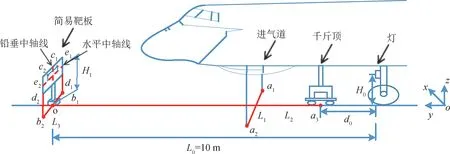
图2 着陆滑行灯校准示意图Fig.2 Schematic diagram of landing taxi light calibration

图3 着陆滑行灯校准几何关系图Fig.3 Geometry diagram of landing taxi lights calibration
根据几何关系,有

着陆滑行灯校准时的主要操作方法为:
1)将简易激光夹具安装在前起落架双着陆滑行灯的灯壳散热片上,保证简易激光夹具激光出光面的中心点与滑行灯的中心出光面重合,如图4所示。
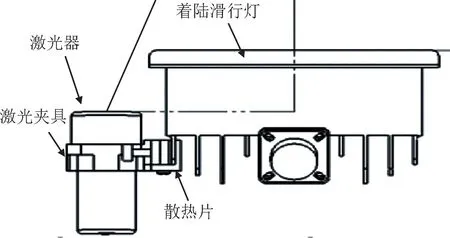
图4 激光夹具校准安装示意图Fig.4 Schematic diagram of laser fixture calibration and installation
2)利用铅锤分别对飞机双进气道基准点作投影,于地面形成投影点a1,a2。
3)在地面用标记笔将a1,a2连线成线段L1。
4)利用铅锤得到机头千斤顶顶块安装中心点对地面的投影参考点a3,并用标记笔作出标示。
5)过a3点作一条垂直于L1的射线L2,在L2射线上测量得出L0-d0长度的端点o,使得|oa3|=L0-d0;过o点作相交于L2的垂线L3,在L3上放置简易靶板,使简易靶板铅直中轴线在地面的投影与L2重合。
6)测量得出滑行灯中心出光面相对地面的高度H0。
7)校准找平简易靶板。调校简易靶板水平中轴线至离地投影点距离为8/9H0的高度H1,再用铅锤得到简易靶板水平轴线两端对地投影点b1,b2,并测量得出投影点b1,b2到靶板水平轴线的铅锤线长度d1,d2;对比d1,d2的大小,若不相等,则需要重新调校靶板,使d1,d2近似相等,同时保证高度H0基本不变。
8)调校双着陆滑行灯俯仰及偏航角度,使用卷尺测量激光夹具投射在简易靶板上的激光点到简易靶板铅直中轴线的距离c1,c2,比较c1与c2的相差值K1是否不大于2 cm的允差;测量得出激光点到简易靶板水平轴线的距离e1,e2,比较e1与e2的相差值K2是否大于1.5 cm的允差。
9)校准找平完成后,关掉环境灯光,使用照度计测量简易靶板激光点位置上滑行灯光照强度Q是否大于700 lx,若不满足要求,重复步骤6)~步骤8),直到满足校准要求。
2 自动化校靶原理
2.1 滑行灯靶板中心位置的激光指示
在飞机前腹千斤顶顶块正下方设置一台激光定位小车,利用光学坐标获取飞机中轴面作为基准面,基准面通过激光投影至靶板。激光定位系统位于飞机机头千斤顶正下方,激光定位系统中三轴激光仪(如图5所示)可发射三束互相垂直的准直激光,即铅锤激光a、水平激光b和天顶激光c。激光a投射在机腹上,与飞机中轴线重合,同时衍射到靶板上;激光b投射在靶板平面上,作为靶板垂直的参考基准线;激光c对准千斤顶支撑位置的中心。
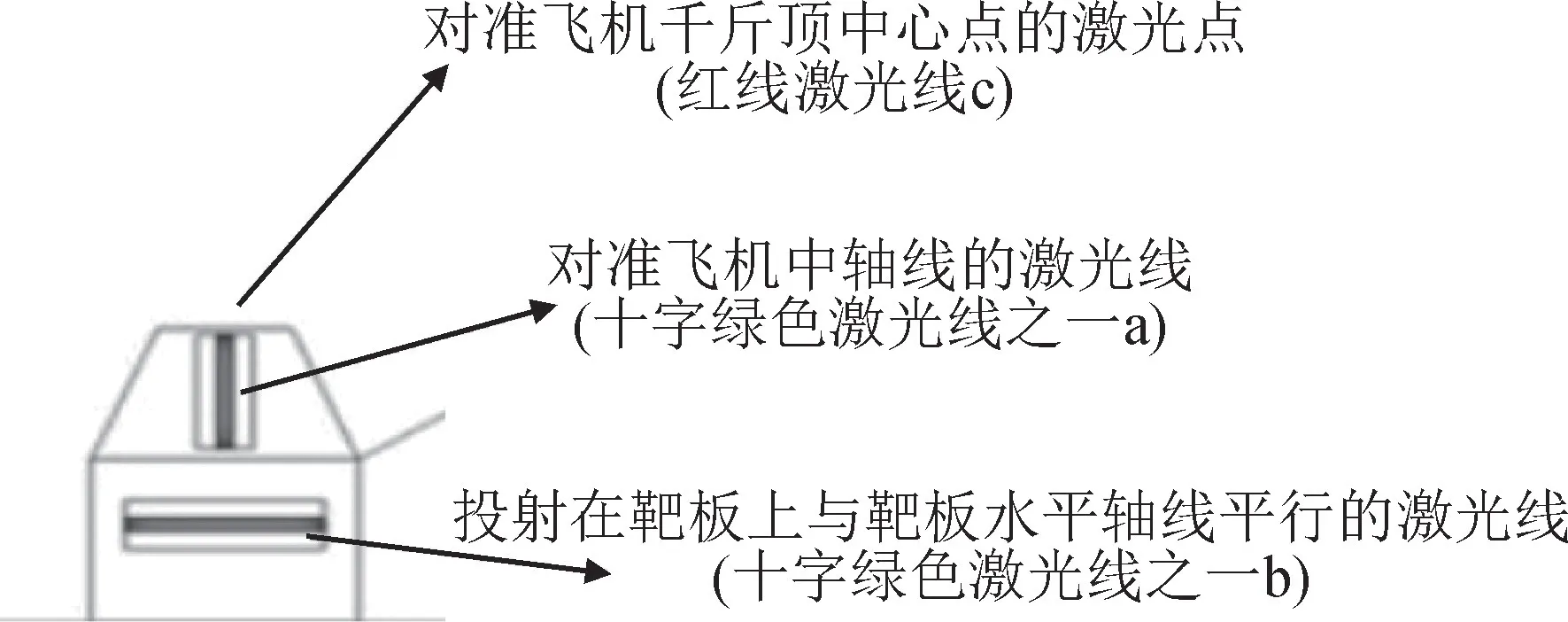
图5 三轴激光仪示意图Fig.5 Schematic diagram of three-axis laser instrument
为了实现不开灯调校着陆滑行灯的效果,在灯具测距/校准系统中设计了激光仪(如图6所示),使该激光仪的激光标记点在10 m外的测试靶板上与滑行灯的光斑中心处重合,以便在测试时用该激光标记点代替滑行灯的中心光强点。
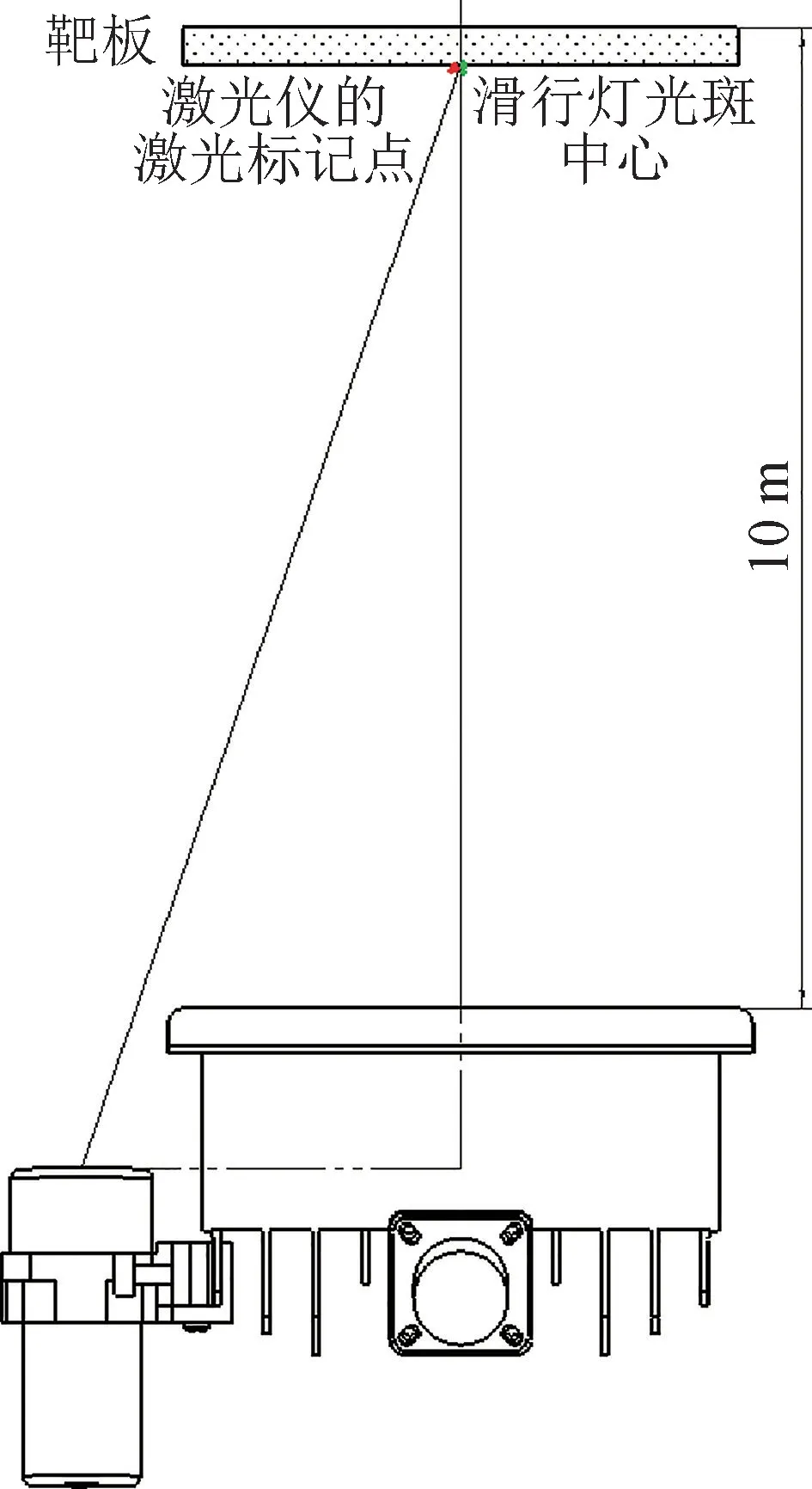
图6 激光标记点位置示意图Fig.6 Schematic diagram of the position of the laser marking point
2.2 飞机中轴面与靶板的对准
在靶板上设置感光传感器、水平传感器检测靶板位置,保证靶板既垂直于飞机中轴面又垂直于水平面,如图7所示。

图7 靶板面与飞机中轴面相互垂直Fig.7 The surface of the target board and the medial surface of the airplane are perpendicular to each other
在飞机中轴面与靶板面相互垂直的条件下,通过观察激光标记点在靶板上的投影,将左右两个着陆滑行灯调校至以飞机中轴面为中心对称,且水平高度一致的状态。
为保证靶板面和被测飞机的中轴面相互垂直,运用平面与平面垂直的判定定理进行判定,如图8所示。如果一个平面α经过另一个平面β的一条垂线a,那么这两个平面互相垂直。

图8 平面α与平面β相互垂直Fig.8 Planeαand planeβare perpendicular to each other
本文中,使三轴激光仪的垂直激光线与飞机中轴线重合,该垂直激光线和飞机前方10 m处的靶板(可将靶板面看作平面β)相交,通过电机系统自动将靶板面校准为与激光线垂直,此时,可以判定包含了该垂直激光线的飞机中轴面(可将飞机中轴面看作平面α)和靶板面相互垂直。
2.3 靶板自动化调平
电子靶板(如图9所示)摆放在距离激光定位系统6.732 m的位置上,平移靶板,使靶板上的光源强度感应传感器与激光a相对重合。

图9 电子靶板示意图Fig.9 Schematic diagram of electronic target board
开启控制单元的电源,靶板系统复位结束后,点击控制单元上的校准开始按键。电子靶板驱动气缸(如图10所示)可驱动靶版自动调整其水平、前后、俯仰三个方向的状态。靶板上的双轴角位移传感器检测靶板水平、俯仰的角度值,并传送给控制单元,控制单元发送校正指令给水平、俯仰伸缩气缸,使靶板完成水平、俯仰状态的调整。靶板上的光源强度传感器感应激光a的光源强度,当光源强度不是最大值时,其发送指令给控制单元,控制单元控制靶板前后伸缩气缸,使靶板完成前后偏转,直到光源强度传感器感应激光a的光源强度为最大值,靶板完成前后状态调整工作。
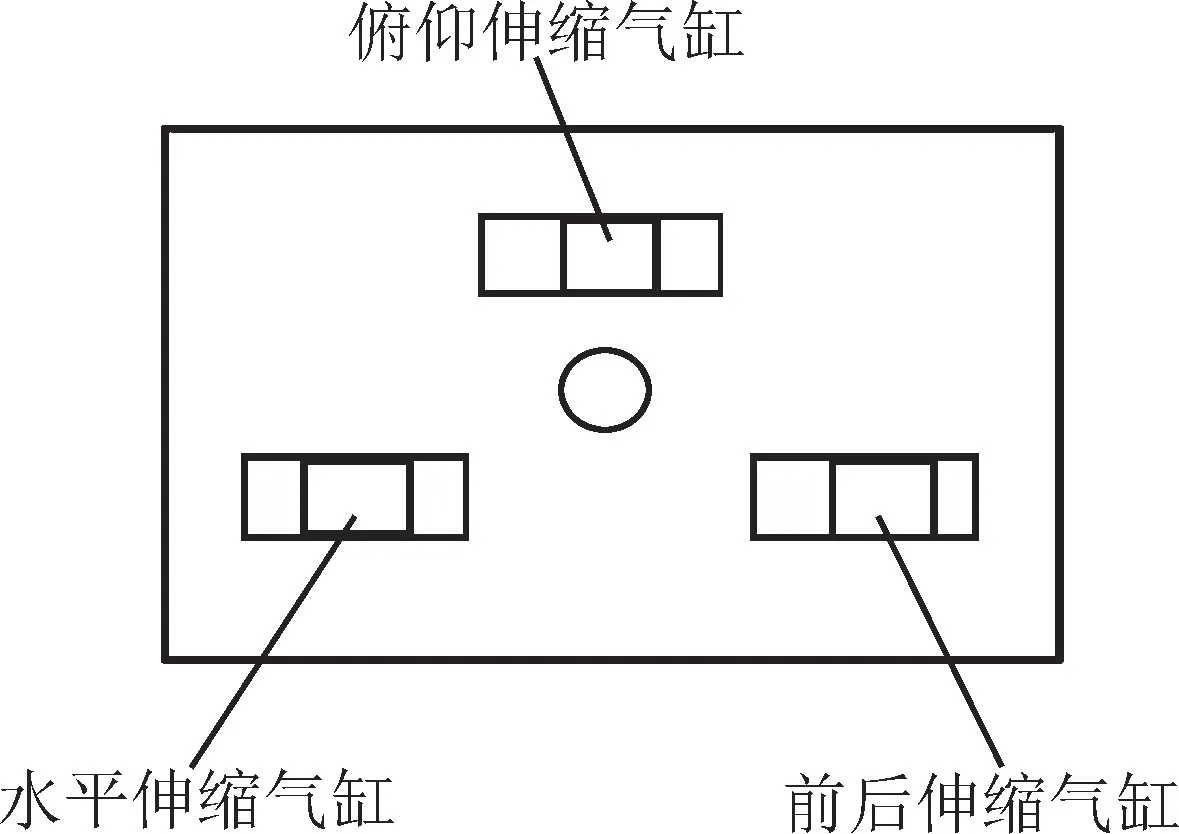
图10 电子靶板驱动气缸设计Fig.10 Design of cylinder driven by electronic target board
安装在滑行灯上的激光对地测距仪测量滑行灯中心出光面相对地面的垂直高度,并将高度信号传送给靶板控制单元;控制单元发送指令给靶板的高度升降伺服电机,使靶板执行高度调整(调整至数值为0.89倍的着陆滑行灯出光面中心出光线对地高度值)。靶板上安装有水准仪,用于验证靶板的水平、俯仰度。
3 基于激光测距的自动化校靶系统设计
3.1 电子靶板系统
电子靶板系统由飞机着陆滑行灯测距/校准系统(含激光笔)、靶板校准系统、激光定位系统、照度计、附件箱等组成,整体实物如图11所示。电子靶板系统依据定位系统的激光信号、水平距离数据和灯具对地高度数据进行自我调整,使靶板平面既垂直于飞机中轴面,又垂直于水平面。靶板内置的陀螺仪使靶板具有感知水平位置的能力,本系统根据陀螺仪的反馈参数自动精确调整自身的水平度。靶板的钣金材料设计方式,使其受环境风速和地面平整度的影响很小,适合外场灯光调校。

图11 电子靶板系统实物图Fig.11 Image of electronic target system
3.2 激光定位系统
激光定位系统由定位器、三轴激光仪、离靶板水平测距感应面组成,如图12所示,其主要功能是将飞机中轴面通过激光坐标系统可视化,并向靶板提供光能量和距离测量点。
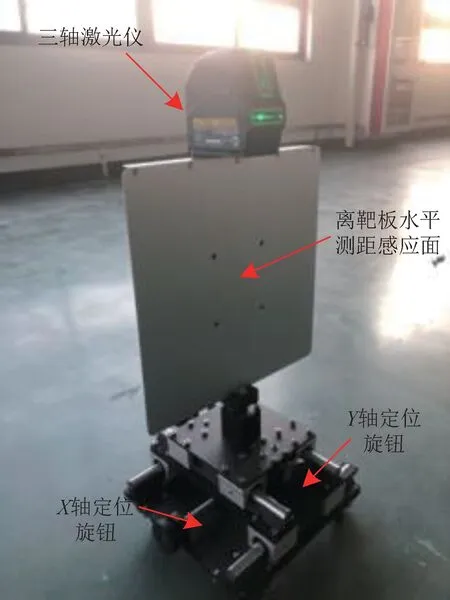
图12 激光定位系统Fig.12 Laser positioning system
三轴激光仪射出2条十字垂直交叉的绿光线(1条垂直、1条水平)和1条竖直的红色激光线,其中红色激光线用于对准飞机前腹千斤顶中心位置(即飞机中轴线的起始位置),十字垂直绿色激光线用于对准飞机轴线和靶板中心垂直线。
水平测距仪安装在离靶板水平测距感应面的靶板下方处。测距感应面作为水平测距仪射出的激光线截止面,用于测量靶板到飞机千斤顶中心点的距离。

图13 激光测距仪Fig.13 Laser rangefinder
为便于操作人员将三轴激光仪中的向上竖直红色激光线对准飞机前腹的千斤顶中心基准点,设计了一组微动调节平台,可使激光仪沿X、Y方向进行微小移动,实现精确对准。
3.3 滑行灯指示系统
着陆滑行灯夹具设计如图14所示,其主要包括对地测量仪、激光笔限位夹具、限位挡块和锁紧条块等部分。对地测量仪用来测量滑行灯中心出光面距离地面的高度值,激光笔用来模拟滑行灯中心出光面,并通过激光笔限位夹具使激光笔中心点与滑行灯出光面齐平。系统整体通过着陆滑行灯背部散热片固定,从结构设计上保证了激光指示笔的射出点距离地面的高度即为被测灯具距离地面的高度。

图14 着陆滑化灯夹具设计图Fig.14 Design drawing of sliding landing lamp fixture
激光笔夹具如图15所示。激光笔安装入夹具后,其射出的激光光线向下与水平线呈0.5°夹角,与飞机滑行灯的出光角度一致。激光笔的激光标记点在10 m外的测试靶板上与滑行灯的光斑中心处重合。
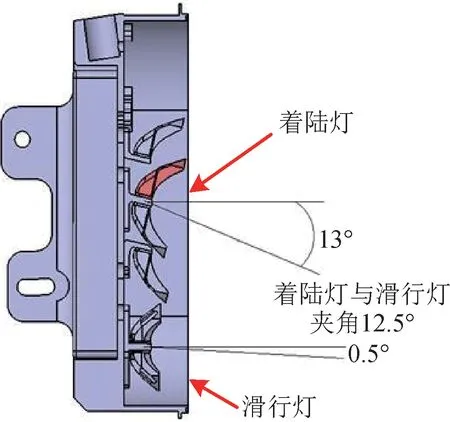
图15 滑行灯出光角度示意图Fig.15 Schematic diagram of the light emitting angle of the taxi light
滑行灯对地测距仪用于测量滑行灯相对地面的距离。通过机械设计及加工保证测距仪起始点与滑行灯的灯带水平高度一致,并通过电缆将测距数据传输至靶板校准系统。
4 自动化校靶系统应用验证
4.1 实验操作简述
基于激光测距的自动校准靶板系统由1~2人操作,定位校准时间不超过1 h,设备整体可收纳为一个整体箱,便于搬运和使用。在调校过程中,将激光测距自动化校准靶板系统安装到位后,靶板系统利用自身陀螺仪自动找平,通过配备的两轴水平仪验证靶板系统的X轴与Y轴的水平度。自动化校准靶板系统操作流程如下:
1)飞机中轴面对准
将激光定位系统置于飞机前腹千斤顶顶块中心点正下方进行轴线定位,使十字光标的垂直线与飞机轴线重叠。
2)初调电子靶板
利用靶板中心定位激光传感器将靶板置于6.732 m处,并结合滑轨处旋钮微调的方式,将靶板的中线与三轴激光仪的垂直激光线对齐。
3)着陆滑行灯夹具安装与调整
将着陆滑行灯夹具安装在着陆滑行灯的散热片上。启动自动校准设备,开机提示开始工作并自动检测X轴、Y轴的角度参数和高度参数H0。若X轴、Y轴的角度大于5°或H0的值不符合匹配范围,系统会提示并停止校准,待调整好之后再启动。
4)着陆滑行灯校准
①接收着陆滑行灯夹具对地测距仪的高度数据,然后校准靶板的高度使零刻度线位于H1(H1=H0-0.13 m)处。
②靶板根据双轴传感器的角度数值自行校准,使靶板面垂直于地平面,且靶板整体水平平行于地平面。
③靶板接收激光垂直光线,通过对比光照的最大值,校准靶板与飞机的中轴截面相互垂直。
4.2 实验效果对比
分别采用传统的灯光校靶方法和本文提出的自动化校靶方法对同一套飞机着陆滑行灯进行校靶,比较两种方法的实际应用效果,如表1所示。

表1 传统灯光校靶方法和自动化校靶方法效果对比Tab.1 Comparison of effects between traditional light calibration method and automatic calibration method
由表1可知,相较传统的灯光校靶方法方法,本文提出的自动化校靶方法的校准准确度提升了80%,操作效率提升了60%,极大地降低了校准工作耗时,且不易受环境风速等因素的影响。
5 结论
针对传统飞机着陆滑行灯校准方法测量准确度低、操作复杂、需要耗费大量人力物力的缺陷,本文研制了一套基于激光测距的自动化靶板校准系统,详细介绍了该系统的工作原理、装置组成、操作方法,并开展了相关实验验证其可行性。结果表明,相较传统方法,使用该系统校准的准确度及操作效率均明显提升,极大地减少了人工劳动强度。该系统可有效满足飞机着陆类灯具校准需求,为航空灯具数字化、自动化检测打下了良好基础,为保障飞机着陆滑行的安全性提供了重要技术支撑。
