一种结合车联网和C-V2X的终端设备系统架构设计
2021-02-10刘晓东
刘晓东
摘 要:本文介绍的网联终端设备结合了蜂窝网移动通信终端和C-V2X PC5直连通信终端,两者通过以太网进行信息交互,均由车载电池供电并连接到车辆总线,根据车辆总线消息进入不同的工作模式;移动通信终端可为车辆提供远控、防盗、OTA、数据路由等多种服务;C-V2X通信终端可与其他车辆、基础设施等进行交互,然后基于交互消息和自身状态进行判断并向驾驶员提供预警信息。
关键词:T-Box;V-Box;C-V2X;Telematics;TCSAE-53;网联;智能交通系统
车联网是汽车电子、移动通信、交通系统高度融合的新产业,是汽车行业最重要的技术创新和产业方向。
目前车联网已逐渐开始普及,为实现网联功能安装T-box的新车在不断增加。新车上安装的T-box配合覆盖率非常高的移动通信网络可为车主、车厂和4S店等提供多种网联服务,例如可为车主提供车辆远程控制、防盗、车载ECU软件的OTA升级等服务,可为车载其它设备提供数据路由,具有紧急状态下的自动或手动呼叫等功能;车厂和4S店可获得车辆状态及故障等信息,向车主推送维修、保养等提醒信息[1]。
0 引言
C-V2X(Cellular-Vehicle to Everything)是一种车用无线通信技术,是将车辆与一切事物相连接的新一代信息通信技术,其中V代表车辆,X代表任何与车交互信息的对象,目前X主要包含车V、人P、路侧基础设施I(例如路侧单元RSU)和移动通信网络N。以C-V2X为代表的智能交通系统可非常有效地降低交通事故,提高交通效率。目前C-V2X设备(简称V-Box)已有新车开始装配,其可与其他车辆、RSU等通过PC5直连通信实现信息交互,并通过T-box与移动通信网络进行交互,获取更多更远的交通信息,这样本车可通过这些信息判断其他车辆的状态、路况或行人的意图等,从而做出预判并提醒驾驶员及时对车辆采取措施,以避免交通事故的发生,或者使车辆以最佳速度通过交通灯路口,减少车辆等待时间和道路拥堵几率,提高道路通行效率等。
我国目前在大力推动汽车的网联化、智能化和电动化,可以预见,随着技术的发展、基础设施的完善、相关法规的实施,车联网和以C-V2X为核心的智能交通系统将逐渐普及,给车主带来更加快捷、舒适、安全的驾驶体验。
1 系统设计
系统结构如图1所示。
2 系统特点
本文介绍了一种T-box加V-Box的方案,该方案是把T-box和V-Box分为两个单独的模块,两者之间、两者和车上其他ECU之间通过以太网进行信息交互,既可实现与移动通信网络的网联功能,也可实现C-V2X的PC5直连通信;这样既可实现车联网的功能,又可实现C-V2X功能(如V2V、V2I、V2N)。
该架构可在已具有T-box的车型上增加V-Box进行升级增配,根据不同的车型等级提供不同的功能配置。
3 各模块的功能及作用
3.1 在上述架构图中,T - box主要用于和移动通信网络通信
1)网联模块通过以太网将与移动通信网络通信的上下行数据与V-Box或车内其他设备(如信息娱乐系统)进行交互。网联模块配备主辅两个外置天线,主天线具有收发功能,辅天线具有接收功能。为了在天线出现故障时能及时发现并通知车主,T-box需具备天线开、短路诊断功能;网联模块和微处理器MCU通过UART等进行状态交互。在待机模式下,为了可远程快速唤醒T-box,网络模块处于DRX模式,当待机超过一定时间(如14天),为减少对车辆电池的消耗,网联模块的电源将被切断进入掉电状态。
2)MCU通过总线收发器收发车辆总线消息并进行解码,根据车辆发送的总线消息(如车辆点火、熄火等),对T-box整机进行开机、待机等控制,并对各模块电源进行管理,实现关键模块的正确上电时序以及整机在待机模式下的低功耗要求。MCU同时还对自身和其他模块进行监控,避免整机进入死循环等状态,如网联模块发送定时信号给MCU,如果MCU超时未收到此信号,则认为网联模块出现意外并强制对其进行复位。
3)总线收发器为CAN收发器,可根据整车总线网络选择高速CAN或CAN FD。使用CAN FD可在T-box待机状态下根据总线报文确定是否唤醒T-box,从而降低功耗。
4)电源模块的设计在兼顾成本的前提下要考虑几个因素:整机和各模块峰值电流的要求,待机模式下低功耗的要求,关键模块的供电诊断,车厂或国标的电源测试标准要求(如ISO7637、传导辐射测试、传导抗扰测试等)。
3.2 V- Box用于PC5直连通信(如和其他车辆、RSU的通信)
1)C-V2X直连通信模块主要用于和其他对象直接交互信息,并根据接收到的消息和本车的状态信息做出预警等判断;具备两个V2X天线。
2)MCU除了接收解码CAN消息用于V-box整机的开关机控制和各模块的电源管理,还将与车辆状态相关的CAN消息(如车辆速度、左右转弯、刹车、双闪灯状态等)解码后发送给C-V2X直连通信模块,该模块再将这些消息发送给周围车辆;MCU同时还对自身和其他模块如直连通信模块、应用处理器进行监控,以避免出现死循环等问题。
3)由于V-Box要处理的C-V2X消息数据量大,如按周围300 m范围内有200辆车、每辆车交互10条消息/秒计算,V-Box每秒需要处理2 000条消息,对处理器的算力要求高,因此需要外加应用处理器专门用于C-V2X消息的处理。
4)由于C-V2X对定位精度和时间精度要求高,除了有通信模块内置的模块用于GNSS数据接收、定位和授时外,还需要外加惯性测量单元IMU(陀螺仪+加速度计)和专门的算法用于特殊场景的定位和授时,例如隧道、高楼林立的市区等。
5)硬件安全模块HSM主要用于C-V2X消息的签名、验签、证书验证以及秘钥存储等,需要支持相应的国密算法。
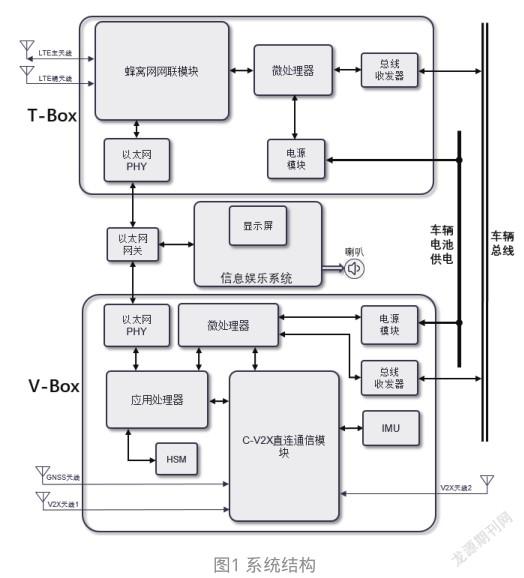
6)以太网除了和T-box交互移动通信网络信息,还将通过以太网網关将V-Box产生的前向碰撞预警、车辆失控等预警信息转发给其他系统,为驾驶员提供及时的图文、语音预警。如果车辆配备驾驶辅助系统,V-Box还可作为传感器,该系统在综合V-Box、雷达、摄像头、超声波等的输入后进行运算决策,然后对车辆进行相应控制(如刹车、减速等)。
4 实际应用
本系统所介绍的方案已应用在实际产品中,可实现TCSAE-53-2017标准中的安全和效率类场景,例如V2I场景的道路危险状况提示、闯红灯预警和绿波车速引导、弱势交通参与者碰撞预警等;V2V场景的前向碰撞预警、盲区提醒和故障车辆预警等,取得了良好的应用效果。
参考文献:
[1] 中国汽车工程学会.TCSAE-53-2017合作式智能运输系统车用通信系统应用层及应用数据交互标准[S].
