基于蒙特卡洛仿真的MEMS陀螺仪可靠度分析
2021-02-05许高斌徐礼建马渊明
许高斌, 徐礼建, 余 智, 马渊明, 陈 兴
(1.合肥工业大学 电子科学与应用物理学院,安徽 合肥 230601; 2.安徽省微电子机械系统工程技术研究中心,安徽 合肥 230601)
微机电系统(Micro-Electro-Mechanical System,MEMS)是一种新兴技术,具有广泛的应用前景[1-3]。MEMS陀螺仪是一种典型的MEMS器件,由于其本身的局限性和工艺加工水平限制,其精度一直较低,这大大限制了其应用范围。随着高新技术的发展,对MEMS陀螺仪的质量和可靠性的要求也越来越高,因此开展其可靠性研究,提升稳定性具有十分重要的意义。
目前,对MEMS器件可靠性的研究已有一些成果。文献[4]通过对某MEMS陀螺仪进行多次重复性高低温实验,得出驱动轴的谐振频率与温度之间存在严格的线性规律,但是未直接给出具体的可靠度值;文献[5]利用应力-强度干涉模型建立了微梁在外载荷下的黏附可靠度模型;文献[6]利用应力-强度干涉模型建立了微梁在冲击作用下的黏附可靠度预测模型,但直接用这些模型计算难度大,计算复杂。
蒙特卡洛法是目前计算结构可靠度的常用方法之一,相比于其他计算可靠度的方法,该方法计算的收敛速度与随机变量的维数无关,无需将极限状态函数线性化和随机变量当量正态化,而且数值模拟的误差也容易确定,因此常用来计算结构失效概率[7]。
本文以静电梳齿驱动MEMS陀螺仪为研究对象,建立了频率匹配失效以及微悬臂梁黏附失效的数学模型,采用蒙特卡洛仿真的方法对相应数学模型进行了仿真分析,并确定了影响可靠度的主要随机变量,可为MEMS陀螺仪的可靠性设计提供参考。
1 MEMS陀螺仪的工作原理
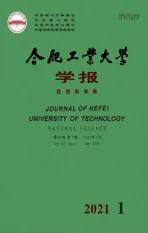
静电梳齿驱动MEMS微陀螺仪属于电容式微惯性传感器,本文研究的一种典型结构的MEMS陀螺仪如图1所示[8],带有梳状电极的平板框架分别与4个L型外梁和4个L型内梁相连,外梁连接到其固定端(锚点)上,并被支撑在基底上方,内梁连接到质量块上,使其相对基底悬空。
工作时,当在x方向有静电力驱动时,若y方向施加一个旋转角速度,则由于科氏力的作用,质量块在z方向会上下振动,进而引起质量块与基底之间的电容变化。
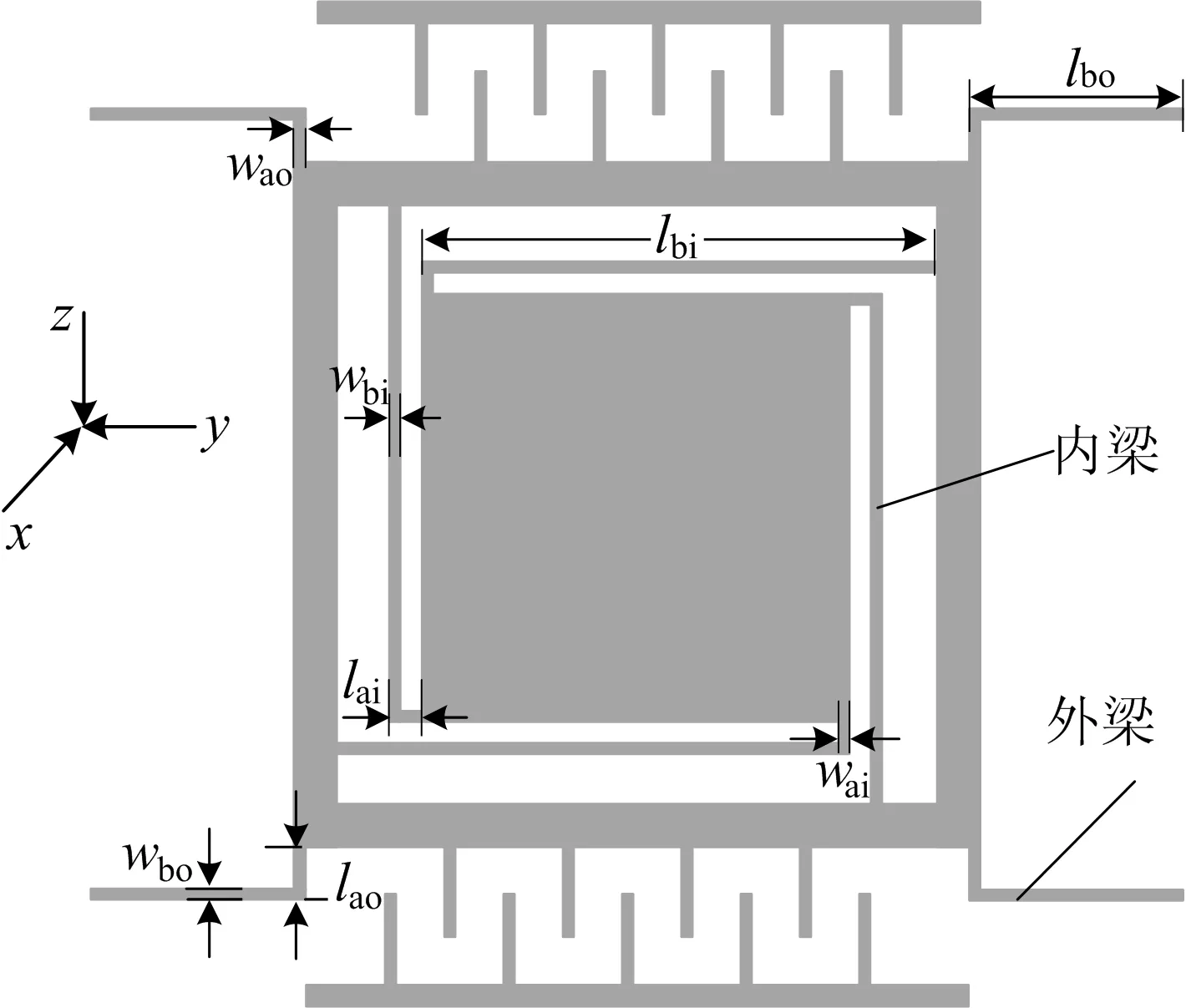
图1 梳齿驱动电容式MEMS陀螺仪典型结构示意图
振动式MEMS陀螺仪的结构虽然各不相同,但都可以等效成一个简化模型,如图2所示,模型包含驱动模态和检测模态2个运动模态。图2中:F为驱动力;Dx、Dz分别为质量块沿x、z方向的阻尼系数;kx、kz分别为支承构件在x、z方向的刚度系数;Ω为旋转角速度。
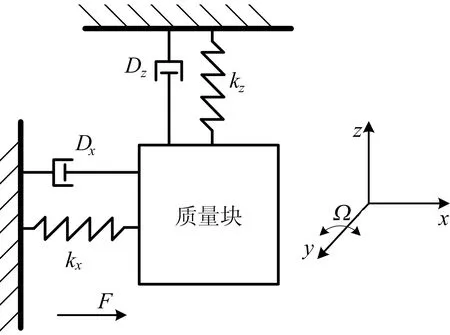
图2 振动式MEMS陀螺仪的简化模型
当陀螺仪工作时,质量块在周期性静电力作用下沿x驱动方向做简谐运动,此时若y方向有角速度Ω输入,则由于哥氏效应,质量块会在z方向上振动,根据z方向的位移变化大小即可解出y方向上的Ω值,此时MEMS陀螺仪的动力学方程[9]为:
(1)
(2)
其中:Fx=Fdsin(ωt),Fd为驱动方向驱动力的幅值,ω为驱动力的角频率;mx、mz分别为MEMS陀螺仪在x、z方向运动时的等效质量。当驱动力频率等于驱动模态频率时,解上述2个方程可得到质量块在z方向运动方程的稳态解为:
(3)
(4)
其中:ωx、ωz分别为驱动模态固有频率、检测模态固有频率;φz为相位。
根据MEMS陀螺仪灵敏度的定义[10]可得灵敏度S为:
(5)
2 MEMS陀螺仪失效建模
2.1 频率匹配失效建模
灵敏度一直是MEMS陀螺仪重要的性能参数之一。由(5)式可知,当ωz接近ωx时,灵敏度增大;当ωx=ωz时,灵敏度达到最大。因此,要获得较高的灵敏度,就应使ωx和ωz尽可能接近或相等。根据文献[11]的研究,当驱动模态与检测模态的频率相差为10 Hz 时,检测模态的位移幅值最大,随着2种模态频率差增大,检测模态的位移幅值会逐渐减小,由此可知驱动模态和敏感检测模态的固有频率相匹配可提高MEMS陀螺仪的灵敏度。考虑到静电负刚度以及系统的稳定性与可靠性,MEMS陀螺仪频率匹配失效的数学模型为:
(6)
其中:G1为频率匹配失效函数;fx为驱动模态的固有频率;fz为检测模态的固有频率。
当0
对于驱动模态和检测模态的固有频率,可以由Rayleigh能量法来确定[12],即
(7)
其中:ki为支撑结构沿着i方向的等效弹性系数;meff为支撑结构在i方向运动时的等效质量。由(7)式可知,各模态的谐振频率主要取决于传感器弹性梁在各个方向的弹性系数以及对应的等效质量。
MEMS陀螺仪支撑梁的L型梁结构示意图如图3所示。
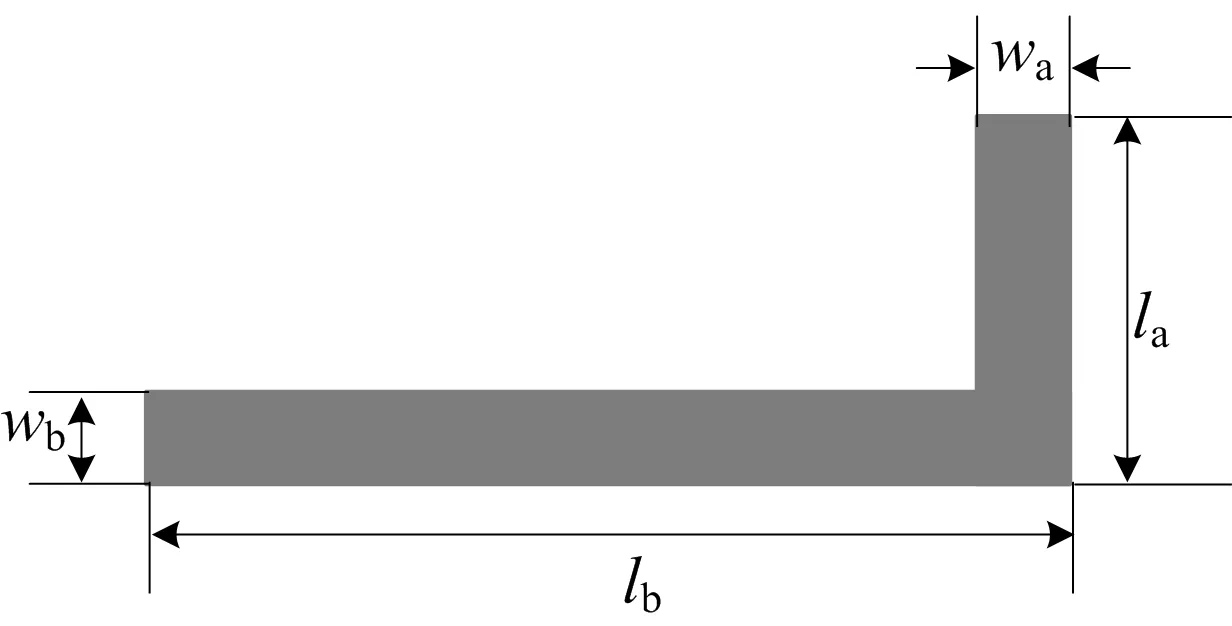
图3 L型梁结构示意图
L型梁在x、z方向的弹性系数计算公式[8]为:
(8)
(9)
其中:E为材料的杨氏模量;ν为材料的泊松比;ho、lbo、lao分别为L型外梁的厚度、长梁长度及短梁长度;wao、wbo分别为L型外梁短梁和长梁的宽度,且wao=wbo=wo,wo为外梁的宽度;hi、lai、lbi分别为L型内梁的厚度、短梁与长梁的长度;wai、wbi分别为L型内梁短梁与长梁的宽度,且wai=wbi=wi,wi为内梁的宽度。
2.2 冲击作用下黏附失效建模
悬臂梁是MEMS陀螺仪中常见的典型结构,可作为支撑结构起到弹簧的作用,也可作为梳齿结构驱动质量块。在高g值测量过程中悬臂梁末端会发生较大的位移,可能与基底发生黏附,导致整个器件的失效。微悬臂梁在冲击加速力作用下的等效变形图如图4所示。图4中:L为悬臂梁的长度;s=L-d,d为悬臂梁与衬底的黏附长度,s为分离长度;H为悬臂梁与衬底间的初始间隙;h为梁的厚度。
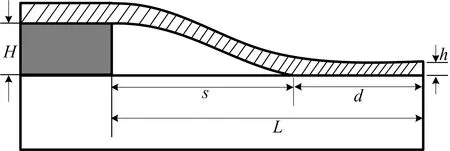
图4 悬臂梁的等效变形图
高g值加速力可以等效为梁受到均匀分布的载荷q[5],即
q=-whaρ
(10)
其中:a为加速度;ρ为材料的密度;w为梁的宽度。由材料力学知识可知,悬臂梁在q作用下d的计算公式为:
(L-d)2[(L-d)2-4L(L-d)+6L2]=
2EHh2/(aρ)
(11)
由弹性力学知识可以得到梁的弹性应变能U为:
(12)
微悬臂梁在冲击作用下有可能与基底接触,接触时由于表面黏附能会产生吸引作用[5]。根据表面黏附能与U的大小关系,可以得到黏附失效的数学模型为:
G2=U-γswd
(13)
其中:G2为黏附失效函数;γs为单位面积黏附能。当G2>0时,微悬臂梁能承受相应冲击,不会发生黏附失效;当G2<0时,微悬臂梁不能承受相应冲击作用,会发生黏附失效;当G2=0时,微悬臂梁处于黏附失效临界状态。
3 可靠度仿真
3.1 基于蒙特卡洛仿真的可靠度原理
本文采用蒙特卡洛法对MEMS陀螺仪可靠度进行预计,计算流程如图5所示。首先根据MEMS陀螺仪的频率匹配要求和梁在冲击条件下的黏附情况建立2个失效函数,然后确定失效函数中的随机变量以及概率分布,根据随机变量的概率分布生成失效函数值的样本值,根据失效判据统计MEMS陀螺仪未失效的仿真结果次数,以此来计算可靠度P,计算公式为:
P=n/N
(14)
其中:n为蒙特卡洛仿真中对应的失效函数Gi未失效的次数,i=1,2;N为蒙特卡洛仿真的随机模拟总次数。
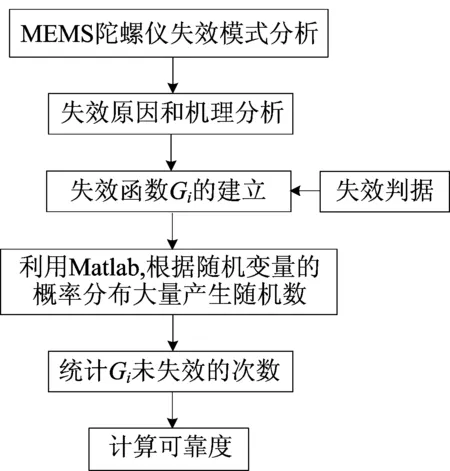
图5 基于蒙特卡洛仿真的MEMS陀螺仪可靠度计算流程图
MEMS产品常由于加工工艺的原因,不可避免地会产生误差,设计的结构往往与设计要求尺寸有所差异,当MEMS产品受高温、冲击等环境作用影响时,这种差异不仅会影响器件的性能,也会降低器件的可靠性[13]。为了准确评价MEMS微陀螺仪的可靠度,需要将这些不确定因素考虑在内,计算其在不同环境作用下的可靠度。
MEMS陀螺仪可靠度蒙特卡洛仿真的关键内容之一就是确定随机变量的概率分布类型及其概率分布。根据本文建立的失效函数,分析可得涉及的随机变量包括MEMS陀螺仪的结构几何参数、材料参数及黏附能参数。MEMS中的微结构受工艺、环境影响,结构尺寸是随机的,假设其满足正态分布。黏附能也是一个随机分布值[14],假设其满足正态分布。
3.2 频率匹配的蒙特卡洛仿真
本文频率匹配蒙特卡洛仿真涉及的参数ν为常数,其均值为0.27;其余参数的分布类型均为正态分布,其均值与标准差见表1所列。
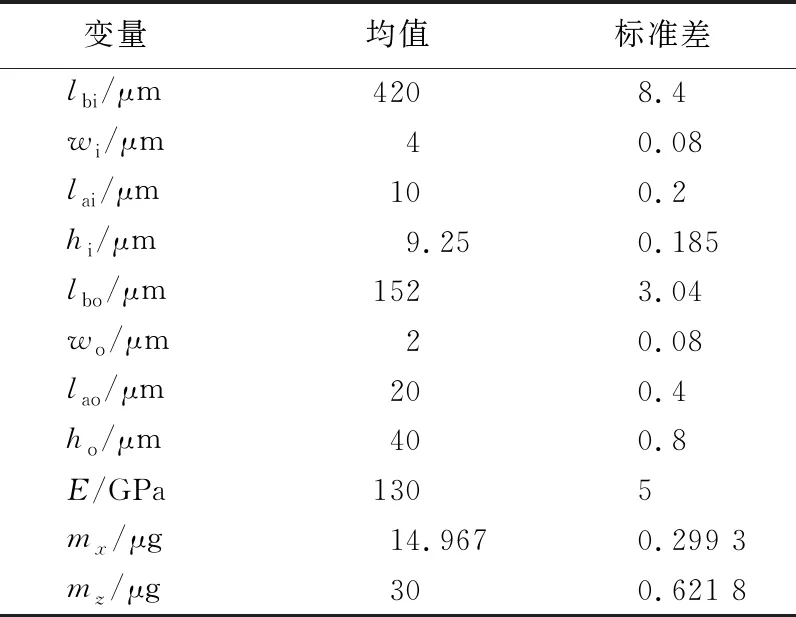
表1 频率匹配失效部分随机变量的均值与标准差
利用(6)式对MEMS陀螺仪进行可靠度分析,参数之间可能具有一定的相关性,目前因为对于参数之间的关系认知不足,所以本文假设参数间彼此相互独立。利用Matlab仿真软件,采用蒙特卡洛法进行105次随机模拟仿真,结果分布统计频率直方图如图6所示。
由图6可知,模拟仿真落在-0.10~0.10区间的个数即为满足频率匹配要求的情况。利用Matlab软件统计符合要求的次数,根据(14)式,可得在298.15 K下MEMS陀螺仪频率匹配失效的可靠度为0.878 4。
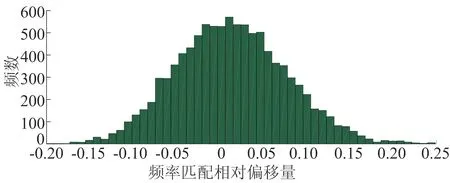
图6 MEMS陀螺仪频率匹配失效仿真分布频率直方图
MEMS陀螺仪在实际中经常工作在不同温度环境下,考虑温度对MEMS器件可靠性的影响具有重要的意义。硅材料的线性热膨胀系数[15]为α=2.6×10-6/K,E随温度变化的表达式[16]为:
(15)
其中:E(0)为0 K下的杨氏模量,取131.28 GPa;θD为Debye温度,取647 K。根据(15)式作出E随温度变化图,如图7所示。
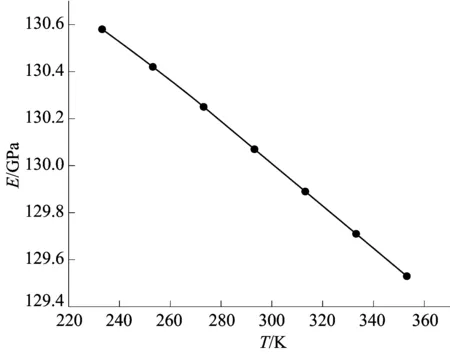
图7 E随温度的变化
考虑温度对MEMS陀螺仪的影响,经蒙特卡洛仿真统计后可以得到P与温度之间的关系如图8所示。从图8可以看出,温度对P的影响很小,在不同温度下P基本保持不变。因为温度对MEMS陀螺仪的影响呈负相关,温度升高,驱动模态频率与检测模态频率都会减小,但模态频率的差值基本保持不变,所以最终得出的P基本保持不变。
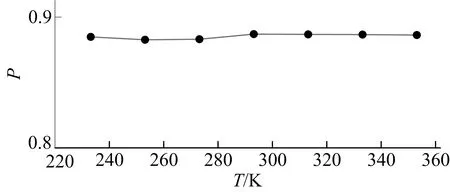
图8 不同温度下MEMS陀螺仪频率匹配失效可靠度
3.3 黏附失效的蒙特卡洛仿真
为了与文献[5]中微悬臂梁的可靠度作比较,仿真中采用的悬臂梁参数与文献[5]相同。黏附失效随机变量的分布类型、均值及标准差见表2所列。
利用(13)式对MEMS陀螺仪进行可靠度分析,可得结果分布统计频率直方图如图9所示。
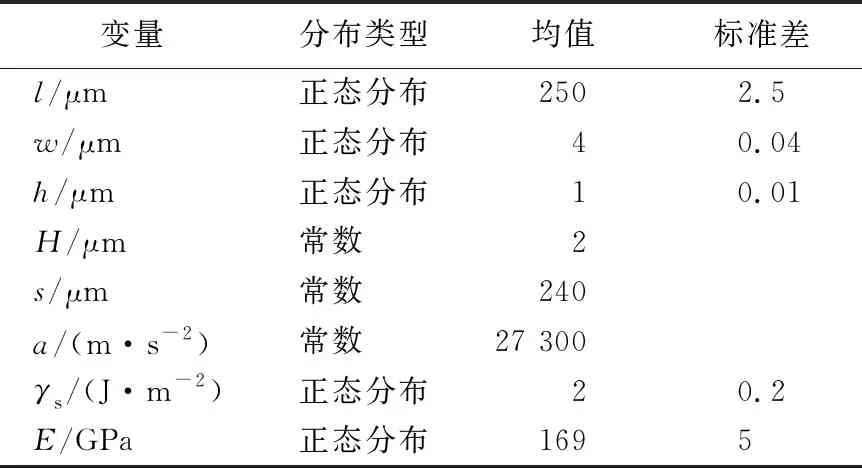
表2 黏附失效随机变量的分布类型、均值及标准差
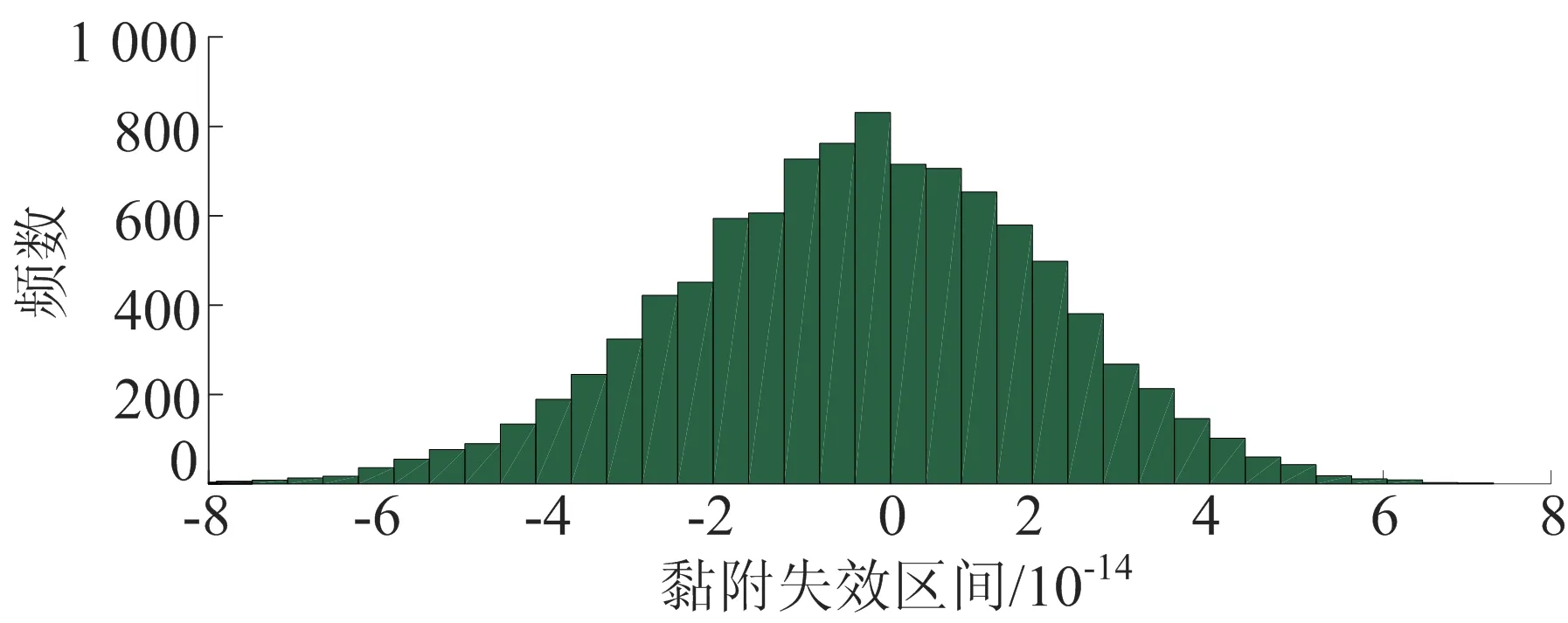
图9 微悬臂梁黏附失效仿真分布频率直方图
由图9可知,模拟仿真落在大于0区间的个数即为满足未黏附要求的情况,根据(14)式,可得到微悬臂梁在42%湿度下黏附失效的可靠度为0.795 1,该结果与文献[5]采用应力-强度干涉模型法得出的可靠度0.785 2比较吻合。
悬臂梁的γs受外界环境湿度的影响很大[14],根据相关实验分析,可以得到γs与湿度之间的关系如图10所示。从图10可以看出,随着湿度增加,γs逐渐增加。
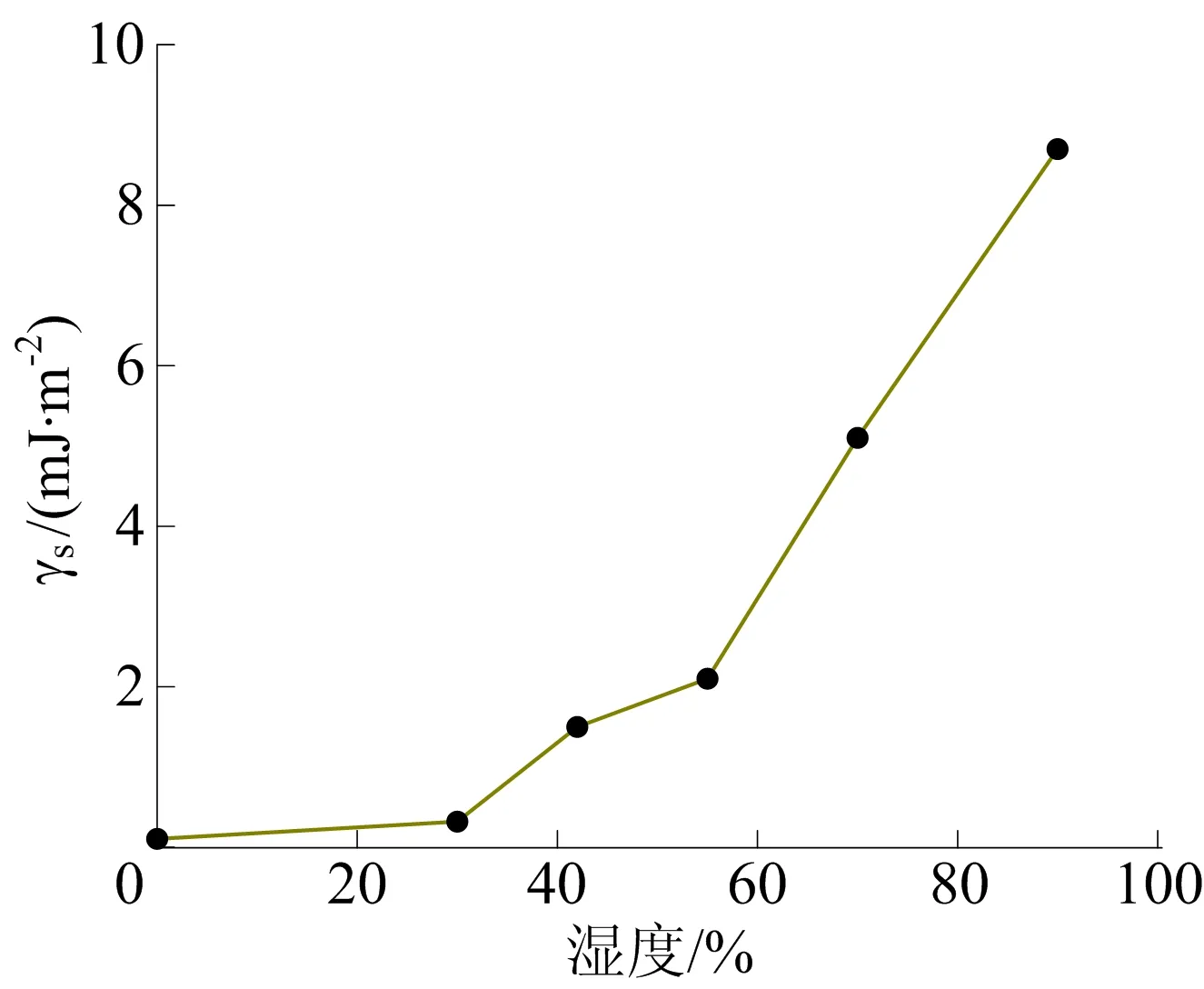
图10 悬臂梁γs与湿度之间的关系
考虑湿度对微悬臂梁在冲击作用下黏附失效的影响,通过蒙特卡洛仿真,可以得到可靠度P与湿度之间的关系如图11所示。
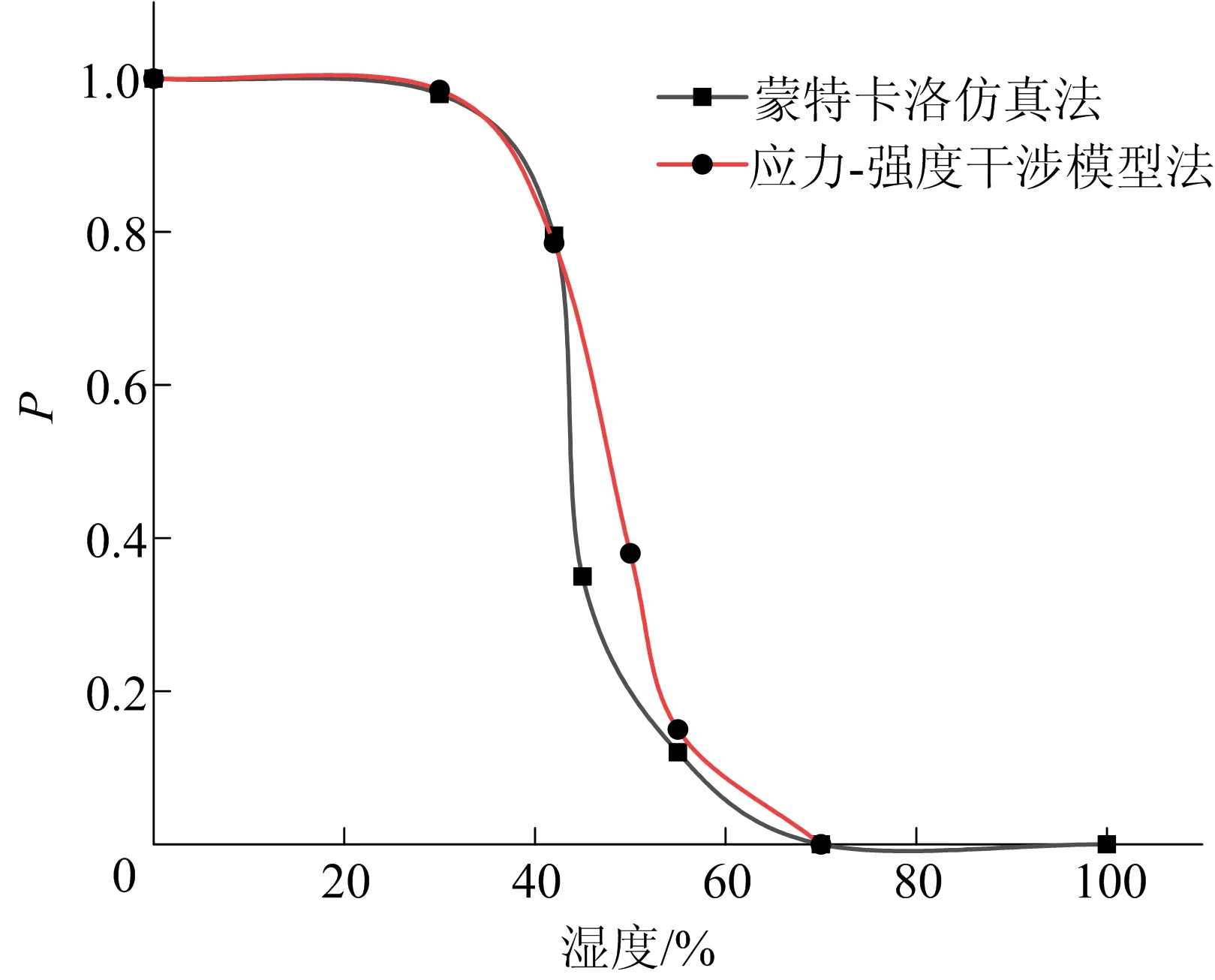
图11 微悬臂梁黏附失效可靠度与湿度之间的关系
从图11可以看出,湿度对P的影响呈负相关,湿度越大,P越低,当湿度大于70%时,P基本为0,这与文献[5]采用应力-强度干涉模型得出的P与湿度之间的关系具有很好的一致性。采用应力-强度干涉模型计算P时计算难度大,而利用蒙特卡洛法计算P时方法简单,更容易理解。
4 参数敏感性分析
为了确定参数变化对可靠度P的影响,将各随机变量值分别逐渐由-20%增加到20%,参数的标准差保持不变,分析P的变化情况,频率匹配失效随机变量的变化对P的影响如图12所示。
由图12可知,对于MEMS陀螺仪的频率匹配失效,参数变化对P的影响很不同。其中,wo、lbo、hi及lbi对P的影响很大,当它们的值相对初始值变化±15%时,P已基本为0;当wi、ho的值相对初始值变化±20%时,P已不及原先的1/2;而lao、lai变化对P的影响很小,P基本保持不变。因此,在频率匹配过程中,要特别注意wo、ho、lbo、hi、wi及lbi变化值对整体匹配的影响。
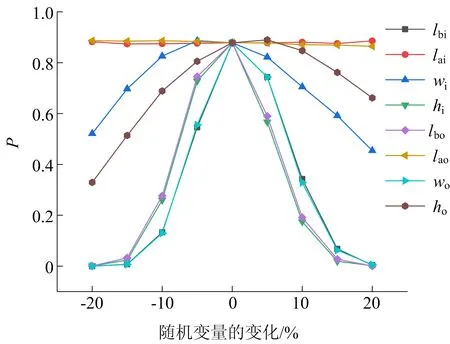
图12 频率匹配失效随机变量的变化对可靠度的影响
对于微悬臂梁的黏附失效,参数的改变对给定冲击加速度a下微悬臂梁的分离长度s有较大影响,在参数敏感性分析中不可忽略s的变化。微悬臂梁的参数变化对于黏附失效可靠度P的影响如图13所示。由图13可知,γs对P的影响呈负相关,l、h对P的影响巨大,而w对P的影响微乎其微。当l值相对初始值变化+5%时,P即为0;h对P的影响却是正相关的,当h值相对初始值变化+5%时,P即为100。因此,增大h、减小l,降低材料γs,都可提高微悬臂梁黏附失效可靠度。
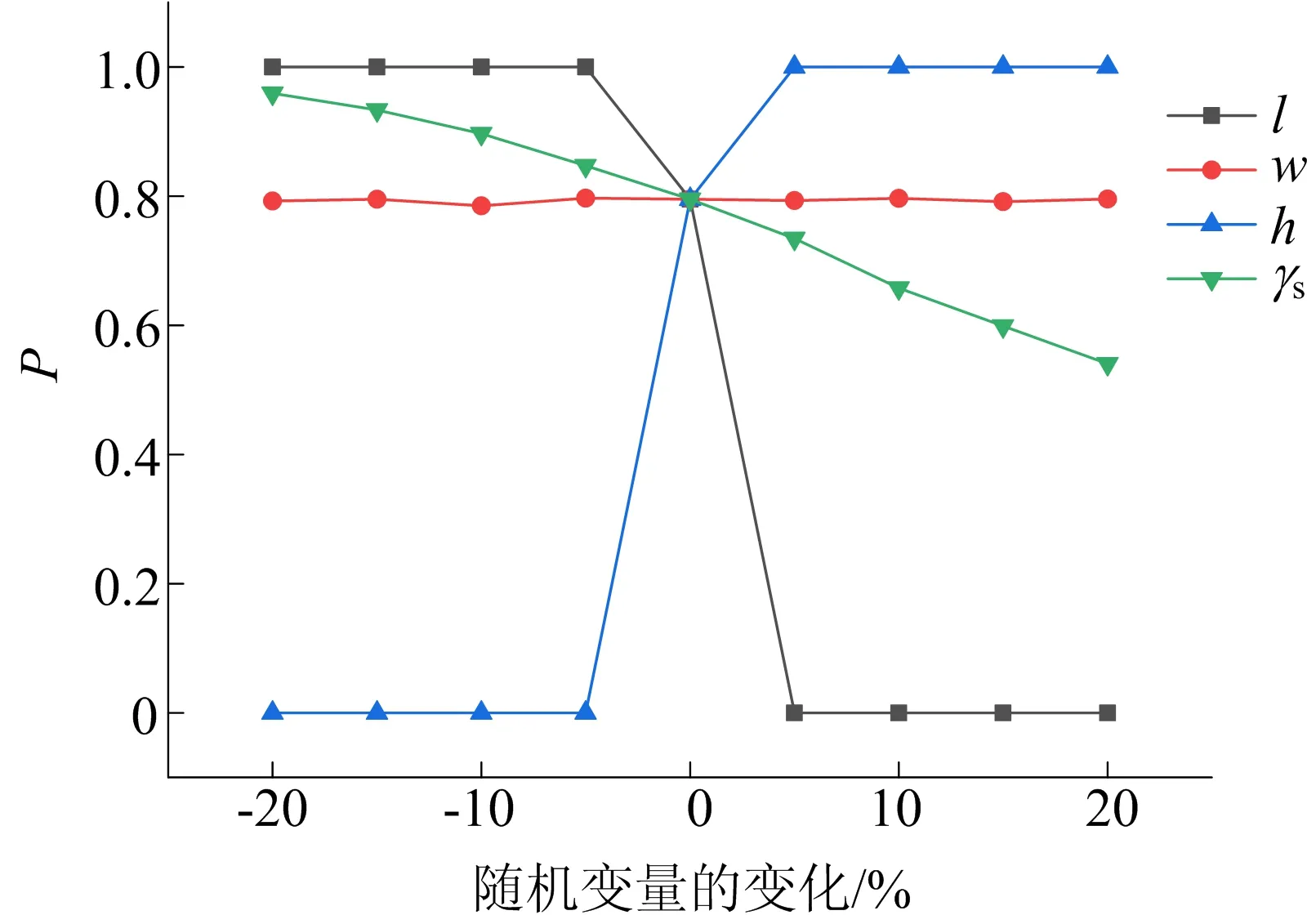
图13 黏附失效随机变量的变化对可靠度的影响
5 结 论
本文根据MEMS陀螺仪的工作原理,从灵敏度的角度提出频率匹配失效数学模型;针对MEMS陀螺仪中典型结构微悬臂梁,建立了在冲击作用下的微悬臂梁黏附失效数学模型。采用蒙特卡洛仿真法,利用Matlab软件分别计算了相应数学模型下的可靠度,频率匹配失效的可靠度为0.878 4,黏附失效的可靠度为0.795 1,其中温度对MEMS陀螺仪频率匹配失效的影响较小,湿度对微悬臂梁黏附失效的影响呈负相关。分别对2个数学模型中的参数值变化与对应可靠度之间的关系进行敏感性分析,结果表明,L型内外梁的宽度、厚度、长梁长度等参数变化对频率匹配的影响巨大,而增加微悬臂梁的厚度、减小长度,降低材料单位面积的黏附能,都可提高微悬臂梁黏附失效可靠度。本文研究结果对MEMS陀螺仪的研制和工程应用具有一定的参考价值,可为有关的可靠性设计分析提供参考。