国产遥感影像分类技术应用研究进展综述
2021-02-04谢仕义
胡 杰,张 莹,谢仕义,2
1.广东海洋大学 数学与计算机学院,广东 湛江524088
2.湛江湾实验室 南海渔业大数据中心,广东 湛江524088
习近平总书记在党的十八大报告中强调,中国科技创新必须坚定不移走自主创新道路。作为当代高新技术的一个重要组成部分——遥感技术,集中了空间、电子、光学、计算机通信和地学等学科的最新成就,是衡量一个国家科技发展水平和综合实力的重要尺度[1]。随着国产遥感卫星数量的增加和分辨率的提高,防控新型冠状病毒肺炎疫情期间,高分二号卫星实时拍摄火神山、雷神山医院建设进程,助力精准施策[2],为我国遥感自主独立应用开创新局面。云计算、人工智能和5G 技术的出现,又为遥感数据的获取提供了更为便捷的方式,如“一带一路”地区干旱指数的提取,促进国产遥感影像分类向更加高精度方向发展。影像分类是遥感影像信息提取中的基本问题之一和遥感影像应用的关键[3],为我国掌握本土信息资源自主权、满足国家的紧迫需求具有重大战略意义。
当今遥感影像从地质灾害管理、矿产资源、城市建设、海洋领域、气象等传统行业应用向精细农业、环境评价、数字城市等新兴行业应用转移,表明遥感技术应用在人们的实际生活中发挥着越来越重要的作用。因此越来越多学者投身于遥感影像分类研究中。就目前已有的遥感影像分类方法方面的文献综述,Li等人[4]从分类的对象和分类时被分像元的纯净程度的角度,把遥感影像划分为基于像元的、混合像元的和基于对象的分类技术;李健[5]依据分类的对象和分类算法,把遥感影像划分为单一影像的、分类器融合的和面对对象的分类技术;张永宏等人[6]就道路提取方法发展现状,把遥感影像划分为基于像元的、面向对象的和深度学习的分类技术;张裕等人[7]从特征空间的角度,把遥感影像划为基于人工特征描述的、基于机器学习的和基于深度学习的分类技术。以上文献对遥感影像分类方法总结的都不够全面和具体。综合上述分类技术,针对国产遥感影像分类方法的研究,依据分类的对象,对中低分辨率的高光谱和多光谱影像采用基于像元的和混合像元的分类技术。由于遥感影像本身的空间分辨率以及“同物异谱”“异物同谱”现象的存在,基于像元的和混合像元的分类法出现了较多的错分、漏分现象,导致分类效果不佳[8]。因此提出了面向对象的分类技术,该技术能够综合利用地物的光谱特征、几何信息、结构信息和上下文的语义信息,较好地解决上述技术分类的不足。对于基于像元的、混合像元的和面对对象的影像分类按照分类算法又细分为统计识别分类和分类器融合分类,通过不同的分类算法以达到影像分类精度提高的目的。
随着卫星和传感器技术的迅速发展,上述这些浅层的机器学习分类模型因为计算单元有限,不能充分学习复杂样本中的复杂信息[9-11],导致分类精度不高。结合当下热门的遥感大数据与人工智能发展方向,针对这些问题,李晓峰团队[12]分别基于经典的U-Net架构(像素级分类)和SSD架构(对象级检测)提出适合于海洋遥感影像的深度学习分类技术。深度学习技术为基于不同场景的遥感影像分类问题带来了新的解决思路,但只有少数学者把深度学习技术应用到国产遥感影像分类的研究工作中,因此研究如何将深度学习方法运用到国产遥感影像的分类中具有深远的研究意义和社会价值。
本文概述了国产遥感卫星数据,然后阐述了四种遥感影像分类技术,并对每种分类技术应用于国产遥感影像的研究进展进行了综合分析,根据每种遥感影像分类技术在其应用上的研究进展分别进行分类方法的比较,总结了国产遥感影像分类技术应用存在的问题及发展趋势。未来为人们在国产遥感影像分类应用研究上提供参考指南。
1 国产遥感数据概述
本文对国内主要的6 个系列遥感卫星数据进行概要介绍,它们分别为环境系列遥感卫星、资源系列遥感卫星、风云系列遥感卫星、高分系列遥感卫星、海洋系列遥感卫星、小卫星系列遥感卫星,各个卫星具体参数内容可以参考文献[13]。
1.1 环境系列遥感卫星
环境系列遥感卫星是我国专门用于环境和灾害监测的对地观测卫星系统[13],主要由2颗光学卫星(HJ-1A卫星和HJ-1B 卫星)和一颗雷达卫星(HJ-1C 卫星)组成的。其中HJ-1A和HT-1B卫星搭载了空间分辨率为30 m的CCD相机,搭载了空间分辨率分别为100 m的高光谱成像仪和300 m 的红外多光谱相机;HJ-1C 卫星是中国首颗S 波段合成孔径雷达卫星,空间分辨率为5 m。它们拥有光学、红外、超光谱多种探测手段,具有大范围、全天候、全天时、动态的环境和灾害监测能力[14]。
1.2 资源系列遥感卫星
资源系列遥感卫星是专门用于探测和研究地球资源的卫星。我国已陆续发射了“资源一号”“资源二号”和“资源三号”系列卫星。“资源一号”系列卫星分别包括中巴合作的CBERS 和国内研发的ZY1。CBERS 包括CBERS-01、CBERS-02、CBERS-02B、CBERS-02C 和CBERS-04,其中CBERS-02B 搭载了2.36 m 全色、10 m多光谱相机,CBERS-02C 搭载了5 m 多光谱、10 m 的PMS 多光谱相机,CBERS-04 搭载了5 m 全色、10 m、20 m、40 m 多光谱相机;ZY1 包括ZY1-02D,ZY1-02D是中国首颗民用高分辨率高光谱业务卫星,搭载了2.5 m全色、10 m多光谱、30 m高光谱相机;它们广泛被应用于农业、海洋、环保、城市规划及灾害监测等领域。“资源二号”(ZY-2)是新一代传输型遥感卫星,包含01、02 和03 星[13],拥有3 m 分辨率影像数据,主要用于城市规划、农作物估产和空间科学试验等领域。“资源三号”(ZY-3)包括01星和02星,“资源三号”01星是中国第一颗自主的民用高分辨率立体测绘卫星,搭载了3.5 m 的立体相机和6 m的多光谱相机;“资源三号”02星搭载了2.5 m的立体相机和5.8 m的多光谱相机;它们主要用于基础地形图的测制和更新以及困难地区测图和城市测图等领域。
1.3 风云系列遥感卫星
风云系列遥感卫星主要有风云一号(FY-1)、风云二号(FY-2)、风云三号(FY-3)和风云四号(FY-4)系列的8颗极轨气象卫星和9颗静止气象卫星,是世界上少数几个同时具有极轨和静止两个系列业务气象卫星的国家和地区之一,同时在服务“一带一路”建设和“共建人类命运共同体”等工作中发挥着积极作用[15]。“风云一号”系列是我国第一代极地轨道气象卫星,已经成功发射4颗卫星(FY-1A至D),搭载了空间环境监测器和1 000 m分辨率的多光谱可见光红外扫描辐射仪,主要用于气候预测、自然灾害和全球环境监测等;“风云二号”系列是我国第一代地球静止轨道气象卫星,已经成功发射8颗卫星(FY-2A至H),搭载了可见光为1 250 m的扫描辐射计和空间环境监测器,主要进行天气图传真广播,监测太阳活动和卫星所处轨道的空间环境;“风云三号”系列是我国第二代极地轨道气象卫星,已经成功发射4颗卫星(FY-3A至D),搭载了17 000 m的红外分光计、62 000 m的微波温度计、16 000 m的微波湿度计、250 m的中分辨率光谱成像仪等11台有效载荷,主要用于监测大范围自然灾害,为军事气象和航空,航海等专业气象服务;“风云四号”系列是我国第二代地球静止轨道气象卫星,已经成功发射1 颗卫星(FY-4A),搭载了500 m 分辨率的可见近红外多通道扫描成像辐射计和0.8~1 cm 分辨率的光谱相机,主要应用于天气预报、灾害预警等领域。
1.4 高分系列遥感卫星
高分系列遥感卫星是研发、搭建高分专项的重要组成部分,对积极支撑服务军民融合发展、“一带一路”建设、精准扶贫等国家重大战略具有重要作用[16],现至少有7 颗卫星投入使用,分别是“高分一号”“高分二号”……“高分七号”。“高分一号”实现了中高分辨率与大幅宽相结合的观测能力,其搭载的全色相机最高实现了2 m分辨率,主要应用于灾害环保、漂物监察、地球遥感等领域;“高分二号”标志着我国民用遥感卫星跨入亚米级分辨率时代,其搭载的全色相机分辨率达到了0.8 m,主要应用于土地利用动态监测、矿产资源调查、城乡规划监测评价等领域;“高分三号”是“国家高分辨率对地观测系统重大专项”中唯一的民用微波遥感成像卫星,又是我国首颗1 m分辨率C频段多极化合成孔径雷达成像卫星[17],主要应用于土壤水分监测、地质灾害预测预警、流域水系特征等领域;“高分四号”是中国首颗地球静止轨道高分辨率对地观测光学遥感卫星[18],其搭载的多光谱相机分辨率为50 m,主要应用于森林火灾监测、洪涝灾害等方面;“高分五号”是国内光谱分辨率最高的卫星,也是国际上首次实现对大气和陆地进行综合观测的全谱段高光谱卫星,其搭载的多光谱相机分辨率为20 m,主要应用于监测雾霾、大气颗粒物等大气环境监测及气候变化研究;“高分六号”是我国首颗精准农业观测的具有高度机动灵活性的高分辨率光学卫星,其搭载的全色相机达到了2 m,主要应用于农业资源监测、林业资源调查、防灾减灾救灾等行业;“高分七号”是我国首颗民用亚米级高分辨率光学传输型立体测绘卫星,可实现我国民用1∶10 000比例尺卫星立体测图[19],其搭载的全色立体相机达到了0.8 m,主要应用于国土测绘、城乡建设、统计调查等方面。
1.5 海洋系列遥感卫星
海洋系列遥感卫星实现了从单一型号到多种型谱、从试验应用向业务服务的转变,向系列化、业务化的方向快速迈进[20]。它包括含有A、B、C 这3 颗试验卫星的海洋水色环境系列卫星海洋一号(HY-1)、含有A和B两颗试验卫星的海洋动力环境系列卫星海洋二号(HY-2)和含有首颗试验卫星的海洋监视监测系列卫星海洋三号(HY-3)[21]。其中两颗海洋水色环境卫星HY-1B和C、两颗海洋动力环境卫星HY-2A 和B 在轨运行。HY-1B是中国第一颗海洋卫星(HY-1A卫星)的后续星,搭载了1 100 m 分辨率的海洋水色扫描仪和250 m 分辨率的多光谱成像仪,主要应用于赤潮监测、海温预报和海岸带监测等领域;HY-1C是中国民用空间基础设施“十二五”任务中四颗海洋业务卫星的首发星,搭载1 100 m 分辨率的海洋水色扫描仪、50 m分辨率的海岸带多光谱成像仪和550 m分辨率的紫外成像仪,主要应用于全球大洋水色水温环境业务化监测、中国近海海域与海岛、海洋防灾减灾等行业;HY-2A、HY-2B 分别是我国第一代静止气象卫星风云二号气象卫星的第一颗试验卫星和第二颗试验卫星,其中HY-2A 搭载2 000 m 分辨率的雷达高度计和50 000 m分辨率的微波辐射计,HY-2B搭载了25 000 m分辨率的扫描微波散射计和校正微波辐射计,它们主要应用于台风和海洋天气监测、暴雨预报等方面;HY-3是综合卫星,搭载1 m分辨率的多极化、多模式合成孔径雷达,主要用以全天候全天时探测海上目标、重要海洋灾害、全球变化等方面[13]。
1.6 小卫星系列遥感卫星
小卫星系列主要选取了“天绘一号”系列、“北京”系列和“吉林一号”系列的遥感卫星数据。“天绘一号”(TH-1)系列是我国第一颗传输型立体测绘卫星,搭载了高分辨率、三线阵和多光谱三种相机,其分辨率分别为2 m、5 m、和10 m[22],包含01 星、02 星、03 星三颗卫星,主要是为了满足国民经济建设对地理影像数据的需要。“北京”系列包括“北京一号”(BJ-1)小卫星和“北京二号”(DMC3)小卫星,其中“北京一号”是我国第一个由企业实施和运行的对地观测卫星,搭载了分辨率为4 m的全色相机和分辨率为32 m的多光谱相机,主要实现对热点地区的重点观测;“北京二号”是由三颗1 m全色、4 m多光谱的光学遥感卫星组成的民用商业遥感卫星星座,主要提供覆盖全球、空间和时间分辨率俱佳的遥感卫星数据和空间信息产品[23]。“吉林一号”(JL-1)系列是中国第一颗商用遥感卫星,在轨14颗遥感卫星,包括8 颗高分辨率视频卫星、2 颗高分辨率光学卫星,2 颗光谱卫星和1 颗技术验证卫星[13],主要应用于国土资源监测、智慧城市建设、防灾减灾等领域。其中光学A 星搭载了0.72 m分辨率全色和2.88 m分辨率多光谱相机;“吉林一号”视频01、02 星可以获取分辨率为3 840×2 160 像素的高清彩色视频影像,搭载了1.13 m 分辨率的彩色视频相机;灵巧验证星搭载了4.7 m 分辨率的全色相机,能够对多重成像技术和国产高敏度CMOS芯片进行验证;“吉林一号”视频03 星搭载了0.92 m 分辨率的彩色动态视频相机,主要服务于森林资源调查、森林火灾预警与防控、野生动物保护等林业发展;“吉林一号”视频04、05、06 星搭载了空间分辨率达到0.92 m 的动态彩色视频相机,主要为政府部门、行业用户等提供遥感数据和产品服务;“吉林一号”视频07 星搭载了空间分辨率为0.92 m的动态彩色视频相机,主要服务于测绘、环保、农业等多个行业发展;“吉林一号”视频08 星搭载了空间分辨率为0.92 m的动态彩色视频相机,主要服务于林业重点工作。
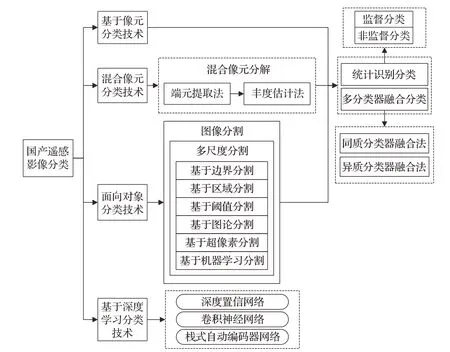
图1 国产遥感影像分类技术研究进展框架
2 国产遥感影像分类应用研究进展
随着遥感影像分辨率的提高和深度学习算法在遥感影像分类方面的成功应用,同时为了更好地向遥感影像自动化、智能化解译方向发展,大部分研究者把深度学习应用在高分辨率遥感影像分类问题上,其中只有少部分聚焦在国产高分辨率遥感影像分类的研究。目前,利用国外遥感数据在影像分类算法上的研究非常丰富,且趋近于成熟。依据分类的对象,国内遥感数据在影像分类算法上的研究绝大数还停留在基于像元的、混合像元的、面向对象的统计识别分类法和多分类器融合分类法。对应用于国产遥感影像的分类方法的研究进展进行了简单的展示,如图1所示。
2.1 基于像元分类技术
图像与像元是息息相关的,在遥感图像中,像元是其成像过程中的采样点和基本单元,其物理意义就是同一像元内的地物灰度值相同且唯一,而数据值代表的地面面积是其几何意义[6]。基于像元的分类,就是在分类中把单个像元作为研究对象,利用像元的光谱信息、纹理信息、空间关联等信息对像元表示的地物类别属性进行判断[24]。像元的分类方法主要有统计识别分类和分类器融合分类。
2.1.1 基于像元的统计识别分类
基于像元用于遥感影像的统计识别分类比较普遍的方法有监督分类法和非监督分类法。
监督分类又称训练分类法,根据训练区已知遥感信息类型的像元,通过反复训练、学习建立分类模型,在该模型上对待分类影像进行相同特征像元自动分类。比较常见的监督分类法有最大似然法(Maximum Likelihood Classifier,MLC)[25-26]、支持向量机(Support Vector Machine,SVM)[27-28]、BP神经网络[29-30]等。
非监督分类是指在事先不知道像元类别特征条件下,按照像元光谱特性的相似度大小进行统计建立分类模型,根据待分类影像总体特征,通过分类模型对其进行预估判断。比较典型的非监督分类法有K-均值(KMeans)[31]、ISODATA[32-33]等。
2.1.2 基于像元的多分类器融合分类
对于遥感影像某具体物体分类问题,基于像元的统计识别分类方法需要通过不断地实验并训练来找到性能最适合的分类器。这种分类法的不足主要在于当先验知识不充分时,通常很难去确定最优的分类器,由于分类器的选取尚缺乏统一的理论指导,因此,寻求广义上提高分类性能的方法成为分类算法的一个研究方向[34]。随着多分类融合定义的确定及其系统广泛的应用,多分类器融合的遥感影像分类应用得到充分的发展。多分类器融合又称多分类器组合、多分类器系统,根据不同的单分类模型对同一研究区域进行训练学习,把分类效果较好的一种或几种分类器,利用融合法进行重新组合。按照分类器类别的集成主要分为同质分类器融合法和异质分类器融合法,其中同质分类器融合法的典型算法是随机森林[35],异质分类器融合法常见的是利用投票法、Bayesian 平均法、模糊识别法等分类器集成方法对多种不同的分类器进行融合。
2.1.3 基于像元在国产遥感影像分类应用中的研究进展
在基于像元的国产遥感影像应用中,研究者们常利用统计识别分类法中的最大似然法,因为其简单的分类操作和较好的分类效果。最大似然法是指在每个像元数据服从正态分布的前提条件下,通过计算每个像元对各类别的归属概率,将该像元分到归属概率最大的类别的方法[36]。周翔等人[37]在基于CBERS 影像的土地覆盖动态监测方法研究中,发现最大似然法较最小距离法的分类效果好。郑盛等人[38]根据深圳市地类分布的特点,通过目视解译在遥感影像上选择感兴趣区域作为各地类的训练样本,利用最大似然法对三个时期的CBERS和HJ-1B影像进行分类,可以明显看到土地利用/覆盖变化。为了进一步探索其他统计识别法的分类精度,Kong等人[39]以河北丰宁县土地覆盖的GF-1遥感影像为研究数据,根据光谱特征、融合NDVI 时间序列和物候参数的不同组合利用支持向量机对土地覆盖进行分类,发现支持向量机的准确率具有很大的优势。Chen 等人[40]选择改进的决策树法对半干旱地区乌兰苏海湖水生植被的GF-1 遥感影像进行分类,结果发现该方法在区分水和水生植被方面优于传统的统计分类方法。为了提高国产影像分类的精度,马凯等人[41]利用BP 神经网络的分类算法对黄岛区HJ-1A 卫星的高光谱影像进行双重分类,经处理后的高光谱影像的分类精度得到显著提高。
与统计识别分类相比,多分类器融合分类方法可以在具体应用中不考虑最优分类器的选取问题,通过融合方法自动获取强分类模型进行影像分类。针对同质分类器融合的国产影像应用,刘毅等人[42]利用随机森林法对灾害监测预报小卫星(HJ-1)、北京1 号小卫星(BJ-1)多光谱遥感影像进行分类,与最大似然、支持向量机的传统分类方法进行比较,发现随机森林具有更好的稳定性、更高的分类精度和更快的运算速度。为了对地物影像进行更好的分类,结合多源影像特征探索随机森林法的分类效果,Fu等人[43]利用小波主元分析(PCA)图像融合技术,将多光谱GF-1 和合成孔径雷达(SAR)图像融合得到的湿地植被数据进行基于随机森林算法分类,提高了总体分类精度。吕杰等人[44]针对利用遥感影像进行森林类型识别容易出现树种误分和模型复杂的问题,结合遥感判读样地、植被指数、纹理信息以及地形因子等多源数据,构建最小距离、支持向量机和随机森林的分类模型对黑龙江凉水自然保护区森林优势树种的高分一号影像进行分类,结果表明结合多源数据的随机森林模型分类总精度较结合多源数据的支持向量机分类法有明显提高。针对异质分类器融合的国产影像应用,杨海波等人[45]根据不同空间分辨率的北京1 号和ETM遥感影像数据集,采用基于误差矩阵的方法对最大似然,最小距离,马氏距离进行精度评价组成的混合判别多分类器结合算法与各个子分类器进行分类比较,发现混合多分类器结合算法能比较显著提高不同遥感卫星不同分辨率的中高精度遥感影像的分类精度。彭正林等人[46]选取分类性能以及多样性好的马氏距离、SVM和最大似然三种分类器作为子分类器,自定义规则对简单投票法、最大概率类别法以及模糊类别积分法进行组合对影像分类,结果表明与单个子分类器中精度最高的SVM 分类相比,基于多分类器组合的遥感影像分类总体分类精度提高了12%,Kappa 系数提高了0.12。李志强等人[47]以长春市部分GF-2 影像为实验数据,对贝叶斯、K-最近邻、支持向量机、分类回归树和随机森林五种不同分类器根据各地类具有最高Hellden值的分类算法构建多分类器组合,该方法分类精度优于任何单一分类器的分类结果。
2.1.4 基于像元的分类比较
依据基于像元分类的研究进展,对国产遥感影像分类在方法上进行比较分析,从方法中的常见方法、原理、典型算法、对基于像元影像的分类效果及优缺点,每种分类的局限性这些方面做了简单的概括。如表1所示。
2.2 混合像元分类技术
遥感影像的空间分辨率、时间分辨率和光谱分辨率的相互制约导致了遥感影像中普遍存在着混合像元(即一个像元内有多种地物)[48],混合像元问题不仅影响地物的识别和分类精度,而且是遥感技术向定量化发展的重要障碍[49]。目前对于遥感影像的分类问题多数单考虑像元光谱间的统计特征,而导致分类的误判,因此在对于含有混合像元的影像分类问题需先进行混合像元分解,其次是分类。
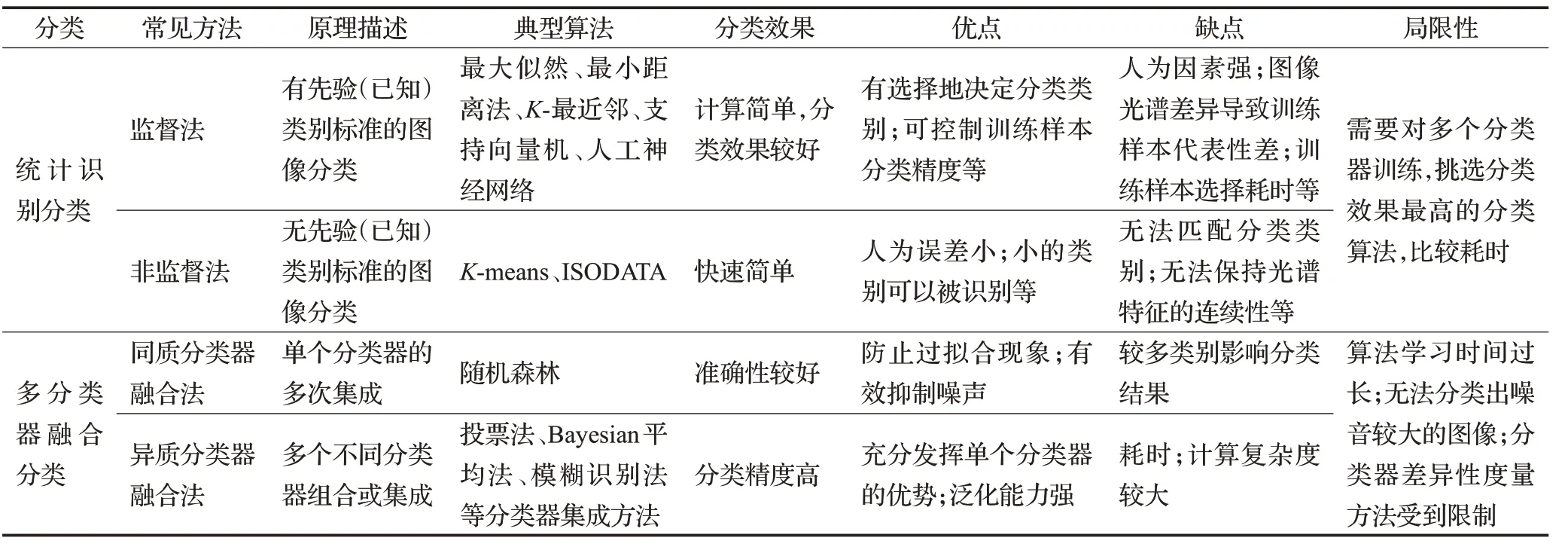
表1 基于像元的分类方法比较
2.2.1 混合像元的分解
混合像元分解是指由像元级达到亚像元级,进入像元内部,将混合像元分解为不同的基本组分单元或端元,并求得这些基本组分单元所占的比例[50]。混合像元的分解模型主要有模糊分解、神经网络分解、线性分解等,比较常用的是线性分解模型。线性分解模型假设在不同物质间不存在相互作用,位于同一像元区域的波谱是纯净物质波谱的线性组合,是根据它们的组成比例进行加权,获取线性组合的组成比例就是混合像元分解。混合像元分解的步骤一般分为端元提取和丰度估计。
端元提取是指在混合影像中提取各种成分,包括确定端元数量以及端元的光谱。在建立线性混合模型并对其进行光谱解混操作之前,选择光谱端元是非常必要的,光谱端元选择的好坏是混合像素光谱解混效果的关键[51]。常见的端元提取法有像元纯净指数法(PPI)、内部最大体积法(N-FINDR)、迭代误差分析法(AEI)和自动形态学端元提取法(SMEE)。
丰度估计是指对每种估计出来的端元物质的比例加以估计。丰度估计算法最经典的为最小二乘算法,它是通过计算误差平方和的最小值的思想得到丰度估计矩阵,该算法包括无约束最小二乘法(LS)、和为一约束最小二乘法(SCLS)、非负约束最小二乘法(NCLS)、全约束性最小二乘法(FCLS)[52]。
2.2.2 混合像元的分类
混合像元的分类是在通过混合像元分解技术获取每个像元或比较均匀的像元组的基础上,利用分类模型对遥感影像数据进行分类的过程。常用到的分类模型是统计识别的分类模型,较少使用多分类器融合的分类模型。
2.2.3 混合像元在国产遥感影像分类应用中的研究进展
混合像元分解作为影像分类过程中的预处理部分,是保证影像分类效果好的关键之一。同时基于像元分类技术已为混合像元的分类研究打好基础,因此国内外研究者更加倾向于混合像元分解技术的研究。由于国内对混合像元分解研究较晚,且混合像元普遍存在于中低分辨率影像中,随着我国遥感分辨率的提高,人们对于具有混合像元的国产影像研究更少。对于混合像元的分解应用,金晶等[53]人针对混合像元分解中普遍存在的同物异谱现象所引起的分解精度降低问题,依据模拟的高光谱数据,提出了基于Fisher判别零空间的高光谱遥感影像混合像元分解法,实验表明该方法能减少端元内光谱差异影响,并精度优于像元纯度指数法和样本光谱算术平均法。付敏[54]以高分遥感数据为研究对象,针对现有解混方法仅考虑了高光谱遥感图像的光谱信息而忽略了空间信息问题,提出了基于地物依赖性约束的高光谱影像混合像元分解算法,该方法在进行混合像元分解时,以非负矩阵分解为基础,从图像全局出发建立地物依赖性约束,使得在解混的过程中高光谱图像的空间结构得以保持,从而有效提升高光谱混合像元分解的解混精度及鲁棒性。崔媛[51]针对传统非负矩阵分解法中解空间较大、存在大量局部极小值的问题,提出了一种改进的平滑性和稀疏性约束的非负矩阵分解法(INMFSSC),通过对模拟高光谱数据和真实遥感图像的仿真研究,实验结果表明,该方法不仅能有效地克服传统非负矩阵分解法的缺陷,而且能估计出精确的端元和对应的丰度,获得较好的解混效果。对于混合像元的分类应用,王玲段[55]利用国产HJ-1A卫星的高光谱数据为数据源,以像元纯度指数(PPI)的混合像元分解法进行南疆主栽经济林木识别分解,采用最大似然分类进行分解对象分类,实验表明,该方法优于典型样地为单元的方式。周炜等人[56]针对水体边界易与周边地物产生混淆而界定困难的问题,利用国产高光谱影像数据,提出一种基于高光谱混合像元分解的水体边界信息提取方法,实验表明该方法精度明显优于水体指数法,略优于支持向量机法。郑丽[49]以国内研制OMISI(实用型模块化成像光谱仪系统)高光谱的延安地区地物数据为研究对象,对自动形态学端元提取(AMEE)与像元纯度指数(PPI)端元提取后的分类比较,结果表明对AMEE 端元提取线性解混后的丰度图像进行最大似然分类精度高于PPI端元丰度图像分类精度,实验表明支持向量机的分类精度高于传统最大似然分类。
2.2.4 混合像元分解的方法比较
依据混合像元分类的研究进展,主要对混合像元分解方法中的端元选取法和丰度估计法进行分析,从分解方法的典型算法、原理、对混合像元影像的分解效果及优缺点这些方面做了简单的概括。如表2所示。
2.3 面向对象分类技术
随着对地观测技术的进步以及人们对地球资源和环境的认识不断深化,高分辨率遥感影像的结构、形状、纹理和细节等信息的分辨率也随之提高,传统的基于像元的影像分类方法只关注影像光谱信息,像元之间相关性差,分类结果具有很大的不确定性,再加上影像本身噪声的影响使得分类后的影像存在“椒盐”效应,缺乏影像完整性和连贯性等[57],并不适应高分辨率遥感影像的分类问题。而面向对象分类技术能够合理运用通过影像分割获取的高分辨率遥感影像对象中的光谱特征和空间特征,依据分类算法针对目标信息对影像特征进行分类。面向对象分类技术的两个主要关键步骤是遥感影像分割和面向对象的分类。
2.3.1 遥感影像分割
影像分割就是将一幅遥感影像变成若干个具有同质性的对象,这些对象遵循空间上的连续性,并且互相之间不能有重叠的特性[58]。众多遥感影像分割中,常用于获取影像对象的方法是多尺度分割。多尺度分割是指对影像信息进行尺度变换,然后结合这些信息来发掘影像中的信息,分析处理发掘出来的信息,来获得更好的信息提取结果[59]。在分割算法上主要有基于边界的、基于区域的、基于阈值的[60]、基于超像素的[61]、基于图论的[62]和基于机器学习的[63]等。基于超像素分割法是按照某种相似度准则,将图像划分为若干个不相交的均匀图像块,所有的图像块组成了整幅图像[64];基于机器学习分割法是通过无监督学习方法或有监督学习方法进行图像分割的。其中分割尺度对影像分类结果好坏非常重要,它决定了形成对象的异质度,尺度过大时获取的影像信息细节不完整,导致用于分类的特征数量过少;尺度过小时获取的影像信息细节较丰富,导致用于分类的特征数量过于冗余,不具有代表性。
2.3.2 面向对象的分类
面向对象的分类是在影像分割获取对象的基础上,利用不同分类模型对遥感影像典型特征进行分类的过程。常用到的分类模型是模糊函数[65],由于其需要事先对阈值进行设置,阈值的过大或小都会造成分类精度的下降,因此提出了统计识别的算法对影像特征分类,常用到的统计识别算法有支持向量机[66]和人工神经网络[67]等。由于机器学习算法对影像分类需要不断的训练和测试,才能挖掘出精度最高的分类器,后来研究者们提出了多分类器融合的分类法。
2.3.3 面向对象在国产遥感影像分类应用中的研究进展
随着我国遥感技术的不断提升,研究者们更加倾向于面向对象的影像分类技术应用研究。面向对象分类技术充分利用遥感影像的光谱、纹理、空间信息,使分类效果更加显著。Chen 等人[68]采用多尺度多特征分割的方法提取影像目标特征,利用加权平均的模糊逻辑分类法进行目标分类,比传统的基于像素的影像分类效果好。但该方法存在分割尺度和分类阈值无法准确确定的局限,导致分类精度下降。针对面向对象的影像分割尺度问题,刘丽雅[24]根据分割算法选取最优分割尺度,分别利用传统基于像元的最大似然法与ISODATA法及面向对象的分类法对50、70、90三种最优分割尺度的高寒山区的高分一号影像进行土地利用/覆盖类型分类,发现当最优分割尺度为50时的面向对象分类法的精度最好。针对分割尺度和分类阈值的局限性,Wu 等人[69]利用面向对象的SVM 对道路影像数据进行分类,该方法的总体分类精度达到92.71%,kappa系数为0.899。针对单分类器分类精度选择的问题,董心玉[58]对高分一号遥感影像的森林数据分别采用基于C5.0算法的面向对象的自动决策树分类和面向对象的单层次最邻近分类法进行对比分析,实验表明面对对象的多层次决策树分类方法分类效果较好。Chen 等人[70]结合数学形态学利用面向对象的随机森林法对长江三峡水库(TGR)附近滑坡地区的ZY-3 遥感影像进行分类,获得较高的分类精度。张金盈等人[71]基于多尺度分割算法获取最优的影像分割对象的主动学习和词袋模型相结合的高分二号遥感影像分类方法,结果表明,该方法可以有效地将研究区域分为水体、地面、植被和建筑物四类,正确率达到90.6%以上。针对多尺度影像分割方法存在地物边界依附性差、易受影像噪声影响等问题,Li 等人[72]对HJ-1/CCD 遥感云影像数据,结合云阴影匹配法和超像素分割算法进行影像分割检测,云检测的总体精度接近90%。Tan等人[73]针对云在光学遥感中可以局部遮蔽地表特征并改变反射率问题,提出一种新的基于概率潜在语义分析(PLSA)和基于对象的云检测的机器学习方法。通过超像素分割线性迭代聚类(SLIC)算法和PLSA 模型对ZY-3 和GF-1 云影像进行特征提取,利用支持向量机进行影像分类,实验表明该方法比传统的光谱影像提高了6.8%,且该方法能够自动、准确地实现目标识别。
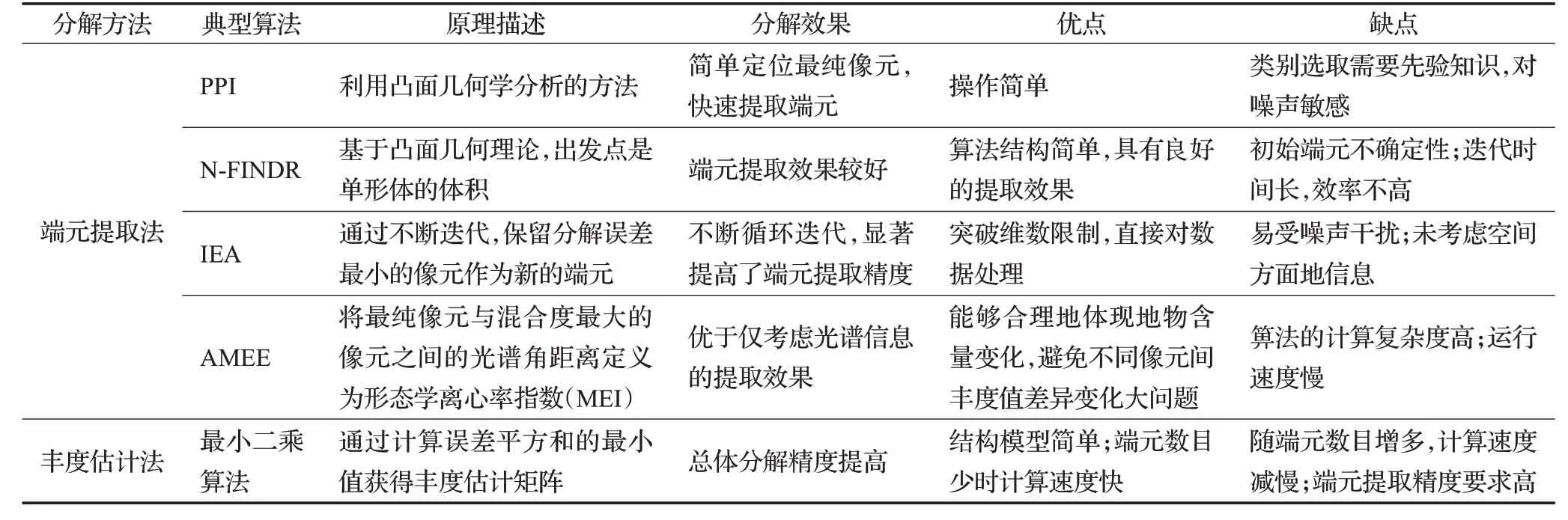
表2 混合像元分解方法的比较
2.3.4 面向对象的分割方法比较
依据面向对象分类的研究进展,对遥感影像的分割方法进行比较分析,从分割方法的常见方法、原理、典型算法、对影像的分割效果及优缺点这些方面做了简单的概括。如表3所示。
2.4 基于深度学习分类技术
2006 年,加拿大多伦多大学教授Hinton 首次在数据的应用上引入深度学习思想,为大数据技术、人工智能应用的实现提供可能[74]。深度学习是机器学习的一个分支,是通过建立类似于人脑的分层模型结构,对输入数据逐级提取从底层到高层的特征,从而很好地建立从底层信号到高层语义的映射关系[75-76]。2013 年,ImageNet 大赛中前20 名算法都采用了深度学习,可见深度学习在图像领域中取得了绝对的优势[77]。深度学习能较好地解决基于像元的、混合像元的和面向对象的影像分类法难以适应高分辨率影像的高维数据、难以从高分辨率影像的大数据中选取合适的分类器、自动化程度不高的问题,及对于通过人工设计的像元特征的费时性和专家知识的依赖性。目前,应用在遥感影像分类方面的深度学习模型主要有深度置信网络(Deep Belief Network,DBN)[78]、卷积神经网络(Convolutional Neural Network,CNN)[79]和栈式自编码器网络(Stacked Autoencoder Network,SAE)[80]。神经网络是深度学习的基础;DBN的出现不仅掀起了深度学习的浪潮,而且加快了深度学习的发展;CNN 是深度学习最具有代表性的模型[81];SAE是深度学习在算法上的优化模型。
深度置信网络是建立在样本数据和标签之间的联合分布的概率生成模型,由多层受限玻尔兹曼机(RestrictedBoltzmann Machine,RBM)和一层某种分类器组合而成[82],每层之间用隐层单元连接用来捕捉可视层的高阶数据间的关联性,其中网络层的一个DBN 的连接是通过自顶向下的生成权值来指导确定的。

表3 影像分割的方法比较(多尺度分割)
卷积神经网络是深度神经网络(Deep Neural Network,DNN)的改进模型,不仅具有DNN 分层提取非线性特征的特点,而且能够识别图像的空间特征[83]。卷积神经网络实际上就是将图像处理和神经网络结合得来的,不是像DNN把所有上下层神经元直接连接起来,而是通过卷积核将上下层进行链接,同一个卷积核在所有图像中是共享的,图像通过卷积操作后仍然保留原先的位置关系。CNN 主要由输入层、若干组交替出现的卷积层与下采样层、全连接层及输出层等基本结构构成。它具有适用性强、分类并行处理能力、权值共享等优点,使得全局优化训练参数大大减少[84-85],在深度学习领域当中,卷积神经网络研究的最多,已成为当前图像识别领域的研究热点[86]。
2007年,Bengio等人[87]在构成DBN的基础上,针对随机初始化产生的基于梯度的优化方法问题提出一种深层网络的贪婪逐层预训练方法——栈式自动编码器网络。它是一个由多层无监督学习的稀疏自编码器结构单元层叠后组成的深度神经网络[88],其前一层自编码器的输出作为其后一层自编码器的输入,最后一层是个分类器。在遥感领域,SAE对光谱空间特征学习能力尤为突出[89-90]。
2.4.1 基于深度学习在国产遥感影像分类应用中的研究进展
国产遥感影像分类应用中,运用最多的深度学习算法是CNN,该方法的特点是影像到影像的端对端学习模型,在该模型基础上可以延伸出对于影像分类效果更好的模型,如深度卷积神经网络(DCNN)和全卷积神经网络(FCN)。针对传统分类方法不能达到较好的分类效果的问题,Ding 等人[91]利用SAE 对土地覆被的GF-1遥感影像进行分类,实验表明其分类精度均高于支持向量机和反向传播神经网络。为了解决单独的深度学习算法分别对高分辨遥感影像分类存在时间复杂度较高、样本数据较少、小物体识别差的问题,Yang 等人[92]提出了对多通道数据拼接方法和DCNN 结构以及深度学习特有的拼接边缘效应进行优化的方法对GF-1影像进行分类,改进后的方法能很好地改善高分辨影像的分类精度且时间复杂度较低。Wang等人[93]在样本规模较小的情况下,根据样本迁移方法,利用残差学习网络(ResNet)提取GF-2 遥感影像的深度特征和低层特征(包括颜色矩特征和灰度共生矩阵特征)来构造各种场景语义特征,再利用SVM 进行影像的高精度分类。宋廷强等人[94]基于GF-2遥感影像提出一种基于SegNet架构改进的网络模型AA-SegNet,增加了增强的空间金字塔池化模块和空间注意力融合模块来分别进行小目标提取和指导低特征图,该方法与深度学习方法Seg-Net、Deep-Labv3和U-Net进行比较,提高了识别的精准度。为了充分利用影像信息提高分类精度,Li等人[95]设计了基于残差卷积块(ResNet50)和金字塔池化模块的多尺度提取网络进行建筑区域的更多判别特征提取,引入焦点损失项进一步提取小规模建筑区域,利用GF-3 SAR数据对该方法进行验证,发现充分利用遥感影像特征的深度学习技术在影像信息分类中具有一定的优势。对于特殊影像单独利用深度学习算法也是不可行的,需要根据特定情况进行算法的结合或改进。楼立志等人[96]为了解决船只紧密相连、不同形状、类型的船只、船只过小等问题,运用可变形部件模型(DPM)的和基于区域卷积网络(R-CNN)的船只检测方法对GF2 遥感船只影像进行监测,发现DPM和R-CNN都能以高召回率和正确率检测水中的船只,但对于聚集船只而言,DPM 的效果更优。裴亮等人[97]提出了基于改进的深度学习全卷积神经网络的资源三号遥感影像云检测方法,该方法检测精度和速度均优于传统方法(FCN-8s、FCN-16s、FCN-32s、FCN-SVM),准确率可达90.11%,单张影像检测耗时可缩短至0.46 s。Chen等人[98]设计了一种基于超像素分割的新的多卷积神经网络(MCNN)对ZY-3、GF-1 和GF-2 遥感影像进行云检测,结果表明该方法可以检测多层云,获得高精度的高分辨率遥感影像。Cheng等人[99]针对传统深度学习方法对水产养殖区域的误判问题,结合U-Net 和混合扩容卷积(HDC)模型(混合扩容卷积U-Net(HDCUNet)),进行接受域扩展,并与FCN-8s、SegNet、U-Net 和Threshold Segmentation(TS)四种方法的提取精度进行比较,验证了HDCUNet 能获取高精度水产养殖区域目标。
2.4.2 基于深度学习的分类方法比较
基于深度学习应用上的研究进展,对影像分类进行方法上的比较分析,从方法原理、分类效果及方法优缺点这些方面做了简单的概括。如表4所示。
3 国产遥感影像分类应用中存在的问题与发展趋势
为了简化特定目标对单个分类器的选择,在基于像元的和混合像元的统计识别分类基础上提出了多分类器融合分类技术,这并没有解决基于像元分类的和混合像元的本质缺陷,因此提出了面对对象分类技术,这些分类技术都属于浅层的机器学习方法,并不能深层次挖掘出和学习到遥感影像信息。随着深度学习的广泛应用,基于深度学习的分类技术被提出,该方法能够自动学习遥感影像的特征信息,实现分类的自动化。面对遥感影像分类技术的更新迭代,分类技术虽然在不断改善,但仍存在不少问题,本文主要针对遥感影像数据和分类技术两方面进行论述。
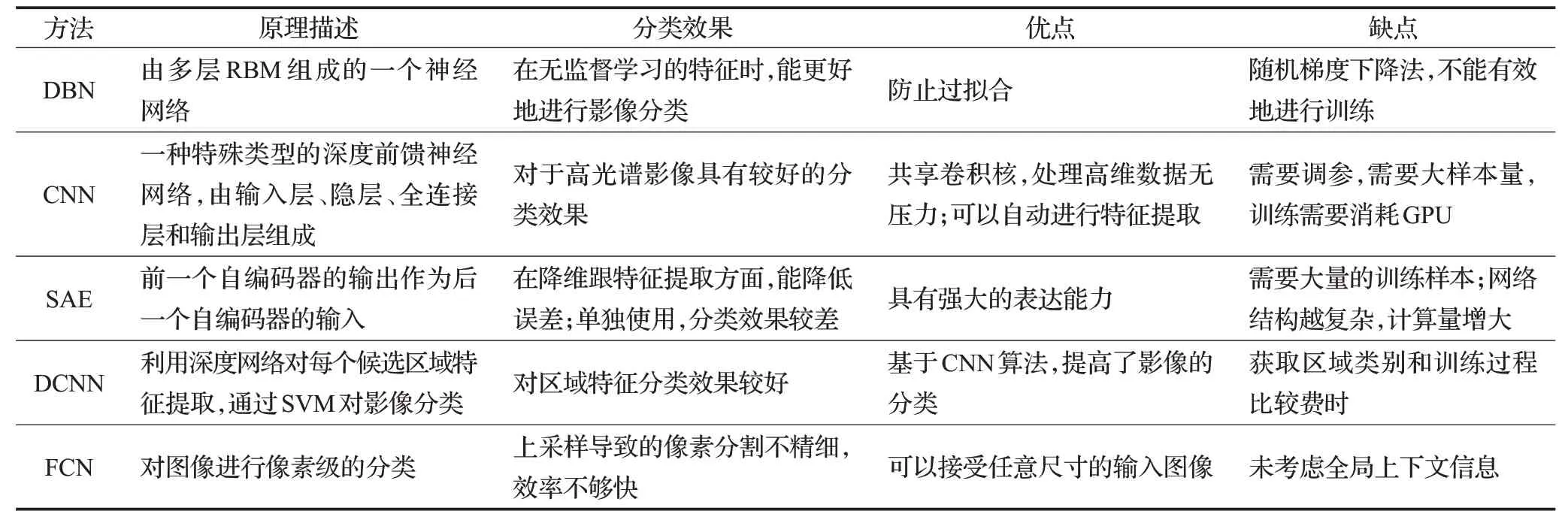
表4 深度学习的分类方法比较
(1)遥感影像的特殊性(密集性、高维特性及场景特殊性)会影响深度学习模型分类效果;遥感影像常常会存在标签样本不足情况,这会导致浅层机器学习模型和深度学习模型无法充分训练,使其分类效果不佳。
(2)混合像元分解技术可以分解出多种地物类型组成的像元,分类精度虽优于基于像元分类技术,由于很难获取高精度端元数据,仍不能解决“同物异谱”“同谱异物”等现象。
(3)面向对象的分类技术虽然能充分运用遥感影像上的特征信息,但在影像分割问题上并没有一个统一有效的分割方法,不同影像分类需要采用不同的分割方法,不具有普遍性;在分类问题上,也需要进行最优分类器的选取,难以保证遥感影像达到最好的分类效果。
(4)基于深度学习的分类技术在处理高分辨遥感影像分类问题优势显著,但深度学习理论在国产遥感影像分类的应用并不完善,即网络结构选取目前尚没有完善的理论依据,而且对于不同深度学习的算法,其网络结构也不尽相同,也适应不同的影像分类目标。
结合上述国产遥感影像分类应用中存在的问题,可以看到未来国产遥感影像在分类应用中的发展趋势如下:
(1)面向对象分类技术的改进和完善。深入投入到面向对象分类技术研究中,寻找最适合的影像分割方法或对原有方法进一步改进;分类问题可能会趋向于多分类器融合的方式。
(2)深度学习模型的深入研究和应用。结合国产高分辨率遥感影像对深度学习模型向更深层次和复杂的网络结构展开研究,针对不同深度学习算法挖掘出影像分类应用中内部间的关联关系,以实现提高模型的学习能力,达到更高的分类效果。
(3)遥感实时监测分析服务云平台搭建。在数据加工应用阶段,行业模型、算力缺失,国外专业软件的大量使用,不自主可控导致的风险比较高。随着航天器测控管理与空间信息应用服务平台——“航天云立方”在华为云上稳定运行,在数据服务的基础建设和云平台的布局上,未来将会更注重于遥感大数据的挖掘与分析,把大数据预测与决策服务搬到平台服务上,形成动态地球平台,及时洞察地表变化信息。
(4)AI遥感。华为云GeoGenius-遥感智能体在遥感产业高峰论坛的亮相,表示着在云+AI+5G的推动下,AI遥感将成为下一个最具普惠价值的AI应用。其中华为云能够降低遥感卫星行业数据存储和计算成本,AI 技术能够大幅减少分析和处理图像的时间以及创造更多新型应用场景,5G 能够保证从云端提取大量数据的效率和速度。
4 结束语
随着我国综合实力的不断提高和遥感影像应用场景的越来越广,实现我国遥感技术的独立自主性应用显得越来越重要。就目前国产遥感影像分类技术仍主要集中在基于像元的、混合像元的和面向对象的分类技术中,由于这三种分类技术在国产影像应用中相对成熟,分类效果也不错,为了提高分类精度进行相应的改进也比较容易。国产遥感影像在运用深度学习技术方面就显得比较青涩,主要是因为深度学习理论研究的不完善,其次是对国产遥感影像深入研究的专家较少。本文综述首先回顾了国产遥感影像分类的研究背景,及简单介绍了应用于国产遥感影像分类的方法;其次分别对国产六个系列遥感卫星数据进行简要概述;接着描述了国产遥感影像四种分类方法,基于每种方法对在影像分类应用中的研究进展进行了归纳,并分别对国产遥感影像分类进行了方法上的对比分析;最后总结了现如今国产遥感影像分类应用中存在的主要问题及对未来发展趋势进行了探讨。