悬挂式单轨车辆走行轮失效对曲线通过及运行平稳性影响的仿真分析*
2021-02-04杜子学刘又铭周军超许舟洲
杜子学 刘又铭 杨 震 周军超 许舟洲
(重庆交通大学轨道交通研究院,400074,重庆∥第一作者,教授)
悬挂式单轨交通系统作为一种小运量的客运轨道交通系统,具有费用低、工期短、施工简单、安全等优点[1-3]。悬挂式单轨车辆的走行轮为橡胶充气轮胎,起着牵引、承载等作用。由于在行车过程中可能出现走行轮爆胎导致走行轮失效无法工作,进而影响车辆正常运行的情况,因此有必要对走行轮失效时的悬挂式单轨车辆的曲线通过及运行平稳性进行研究。
文献[4]通过采用不同导向轮预压力,研究了导向轮预压力对悬挂式单轨车辆曲线通过性能的影响。文献[5]通过采用不同的空气弹簧竖向刚度、横向刚度、阻尼,研究了空气弹簧参数对悬挂式单轨车辆动力学性能的影响。文献[6]通过不同走行轮侧偏刚度、不同车速研究了导向轮径向力对车辆曲线通过性能的影响。文献[7]针对车间减震器对悬挂式单轨运行平稳性和曲线通过性能的影响进行了研究。文献[8]采用Sperling 指标对小半径曲线通过时的悬挂式单轨车辆平稳性进行了研究。文献[9]通过不同工况研究了二系悬挂参数对悬挂式单轨车辆运行平稳性的影响。但是,目前尚未有针对走行轮失效对悬挂式单轨影响的研究。
本文通过建立多刚体车轨耦合动力学模型,通过对不同的走行轮进行失效处理,研究其对悬挂式单轨车辆的曲线通过及平稳性的影响,为走行轮失效的悬挂式单轨的运行提供一些参考。
1 悬挂式单轨车辆车轨耦合动力学模型的建立
悬挂式单轨车辆主要由车体和前后转向架组成。走行轮安装在转向架的两根车轴上,起到传递牵引力和制动力以及承受竖向载荷的作用。导向轮安装在构架四角,与箱型梁内部导向轨面接触,起到导向的作用。为了防止在行车过程中出现车辆走行轮爆胎而导致车辆无法继续运行的状况,还在转向架上设置有走行辅助安全轮[10]。在走行轮爆胎失效时,走行辅助安全轮开始工作,起到临时代替走行轮的作用。悬挂式单轨的轨道梁由2 个走行轨面和2个导向轨面组成,但2 个走行轨面是在1 个平面上,因此采用1 个走行轨面和2 个导向轨面来模拟轨道梁。本文建立的轨道梁线路包含直线段—缓和曲线段—圆曲线段—缓和曲线段—直线段共5 段,采用的弯道类型为右转弯道,线路曲率设置如图1 所示。本文将车体和转向架假定为刚体,通过Adams 软件建立多刚体动力学模型(如图2 所示),仿真分析走行轮爆胎失效时车辆的运行情况。车体的运动微分方程见式(1)。
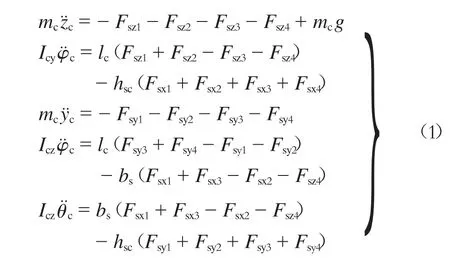
式中:
mc——车体质量;
g——重力加速度;
Icx——车体绕x 轴的转动惯量;
Icy——车体绕y 轴的转动惯量;
Icz——车体绕z 轴的转动惯量;
xc——车体纵向位移;
yc——车体横向位移;
zc——车体竖向位移;
φc——车体点头角;
θc——车体侧滚角;
ψc——车体摇头角;
Fsx——二系悬挂纵向力;
Fsy——二系悬挂横向力;
Fsz——二系悬挂竖向力;
2lc——车辆定距;
bs——二系悬挂横向跨距。
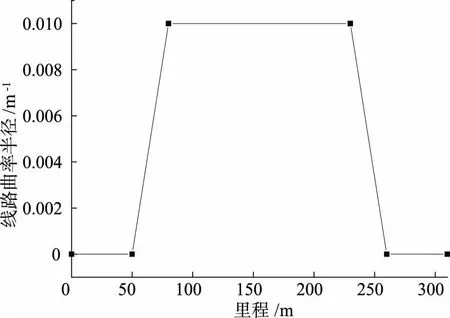
图1 线路曲率设置
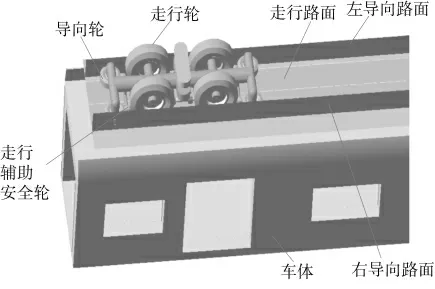
图2 悬挂式单轨车辆车轨耦合动力学模型
2 走行轮失效对曲线通过及运行平稳性的影响分析
2.1 走行轮失效对曲线通过性能的影响分析
基于悬挂式单轨的走行机理,将导向轮最大径向力、走行辅助安全轮竖向力、车体侧滚角、走行轮最大竖向力作为评定悬挂式单轨曲线通过性能的指标[11]。当行车状态满足导向轮最大径向力大于19.6 kN、走行辅助安全轮进入工作状态、车体侧滚角大于10°、走行轮最大竖向力大于70 kN 等条件之一,则认为此时车辆运行处于不安全状态。
2.1.1 工况1
采用轨道为曲线半径100 m 的右转弯道,导向轮预压力设置为4 900 kN,车辆为空载状态。在不同行车速度下,对正常运行及前转向架不同走行轮失效的悬挂式单轨车辆进行仿真分析,仿真结果如图3。
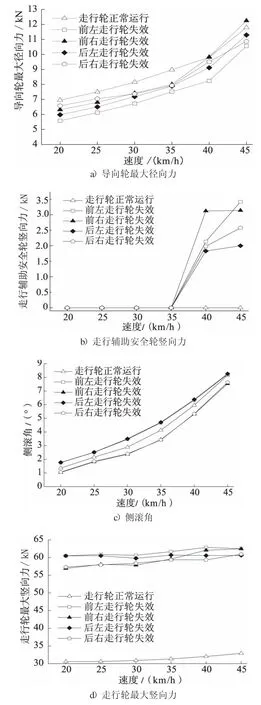
图3 空载状态下不同速度对曲线通过性能的影响
从图3 中可以看出:
1)空载状态下走行轮失效时,在行车速度小于35 km/h 的情况下,导向轮最大径向力小于19.6 kN,走行辅助安全轮竖向力为0,车体侧滚角小于10°,走行轮最大竖向力小于70 kN,此时悬挂式单轨车辆能够正常运行;在行车速度大于35 km/h 的情况下,走行辅助安全轮竖向力从0 开始增大,走行辅助安全轮处于工作状态,此时不能满足悬挂式单轨车辆正常运行的要求。因此在空载状态下,走行轮失效的悬挂式单轨车辆在曲线半径为100 m 的线路上限速为35 km/h。
2)前左、后左走行轮失效时,导向轮最大径向力、车体侧滚角、走行轮最大竖向力随速度变化的规律基本一致;前右、后右走行轮失效时,导向轮最大径向力、车体侧滚角、走行轮最大竖向力随速度变化的规律基本一致。说明同侧走行轮失效给车辆曲线通过性能造成的影响基本相同。
2.1.2 工况2
采用轨道为曲线半径100 m 的右转弯道,导向轮预压力设置为4 900 kN,车辆为满载状态。在不同行车速度下,对正常运行及前转向架不同走行轮失效的悬挂式单轨车辆进行仿真分析。仿真结果如图4。
从图4 中可以看出:
1)满载状态下走行轮失效时,在任意速度下走行辅助安全轮的竖向力都不为0,且均有随速度增大而增大的趋势,车辆处于不安全状态,但车辆可以暂时依靠走行辅助安全轮行驶到就近站台。
2)走行轮失效时,弯道内侧导向轮径向力、车体侧滚角均比走行轮正常运行时大,且随速度的变化规律基本一致;弯道外侧导向轮径向力、车体侧滚角均比走行轮正常运行时小,且随速度的变化规律基本一致。说明弯道内侧走行轮失效对车辆运行影响较弯道外侧走行轮失效时更大。
2.2 走行轮失效对运行平稳性的影响分析
悬挂式单轨车辆运行平稳性测量点选择方法如下:取车体前后2 个转向架中心上方横向1 m 的车体地板面上两点A、B 作为加速度测量点[12],平稳性指标按式(2)计算:

式中:
W——平稳性指标;
a——振动加速度,单位为自由落体加速度;
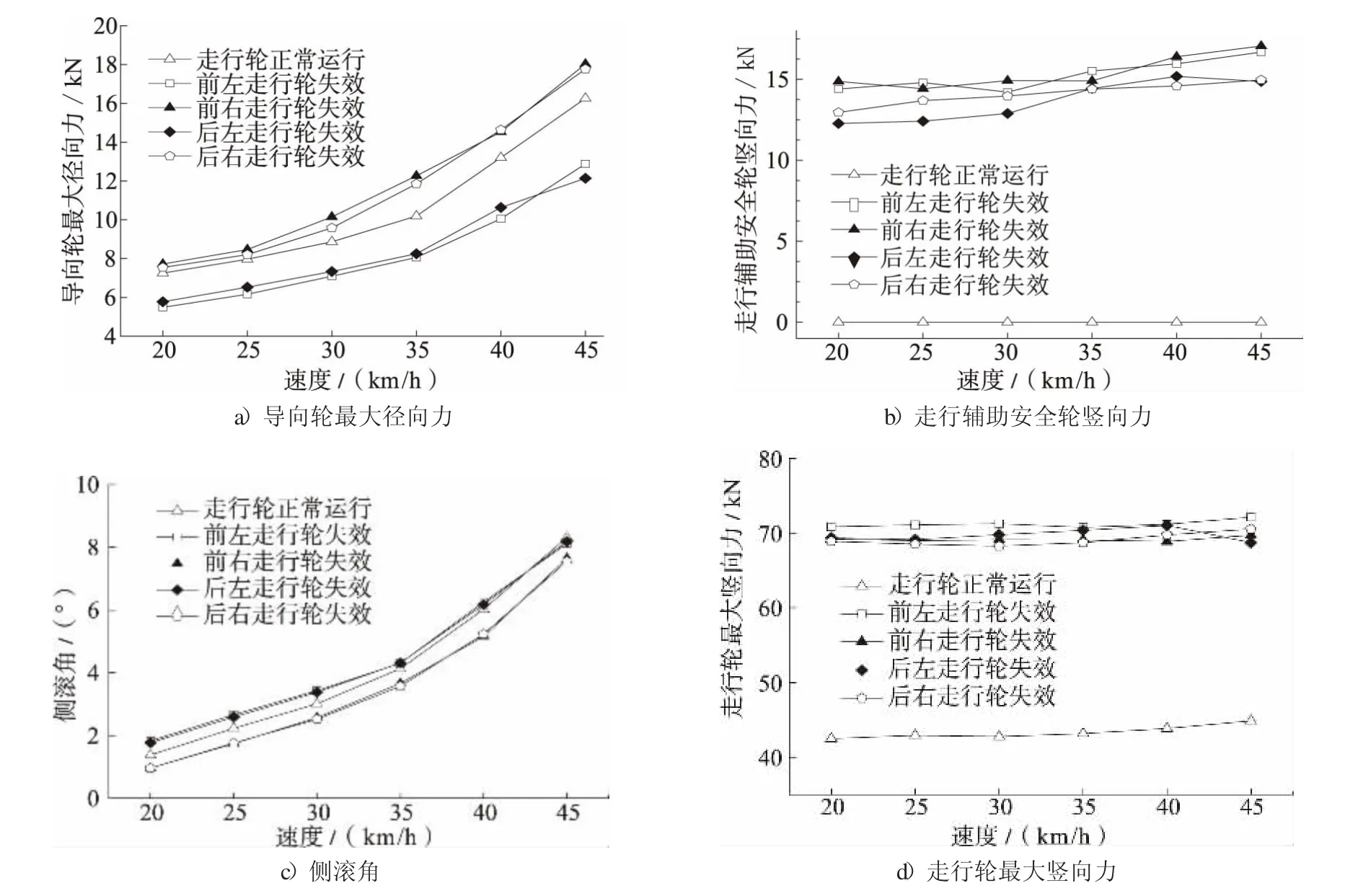
图4 满载状态下不同速度对曲线通过性能的影响
f——振动频率,Hz;
F(f)——频率修正系数,见表1。
表1 频率修正系数
由于车辆振动实际上是随机的,其加速度和频率都随时间而变化,需要将振动波形按频率分组,统计每一频率中不同加速度的值,进而得相应的平稳性指标W1、W2……,Wn。总的平稳性指标按式(3)求得:

按照GB 5599—85《铁道车辆动力学性能评定和试验鉴定规范》相关规定[13],通过车辆的竖向和横向平稳性指数来评价单轨车辆的运行平稳性。平稳性评定等级见表2。
表2 客车运行平稳性等级
在进行平稳性评定时,采用的轨道为500 m 的直线线路,并将不平顺激励施加在走行路面和导向路面上,导向轮预压力设置为4 900 N,按照式(3)计算点A 和点B 的平稳性指标。指标评定结果见图5 及图6。
从图5 和图6 中可以看出:
1)在走行轮正常运行的情况下,不论是横向平稳性指标还是竖向平稳性指标都小于2.75,此时车辆具有良好的运行平稳性。
2)相同行车速度下,走行轮失效时单轨车辆的横向平稳性指标较车辆正常运行时增大了0.001 ~0.470。但都小于2.500,车辆的横向平稳性等级为优;竖向平稳性指标较车辆正常运行时增大了0.001 ~0.890,部分指标超过3.000,车辆的竖向平稳性等级为不合格。说明走行轮失效时,车辆运行平稳性变差。
3 结论
1)悬挂式单轨车辆空载状态下走行轮失效时在曲线半径100 m 线路上的限速为35 km/h,而满载状态下走行轮失效时车辆一直处于不安全状态,需要尽快行驶到就近站点以疏散乘客及返回维修基地。
2)分析发现,同侧走行轮失效对车辆曲线通过性能的影响规律基本相同。
3)在相同行车速度下,走行轮失效时悬挂式单轨车辆的横向平稳性指标较车辆正常运行时增大了0.001 ~0.470,但都小于2.500,车辆的横向平稳性等级为优;竖向平稳性指标较车辆正常运行时增大了0.001~0.890,部分指标超过3.000,车辆的竖向平稳性为不合格,车辆应该减速行驶,尽快到达临近站点。
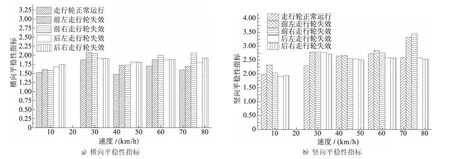
图5 A 点运行平稳性指标
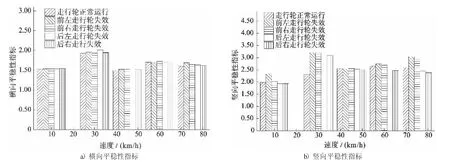
图6 B 点运行平稳性指标
