基于多核协作式控制器架构的地铁列车牵引多模式控制策略
2021-02-04周双雷邬春晖
周双雷 邬春晖 王 博 徐 萌
(1. 中车青岛四方车辆研究所有限公司,266114,青岛;2.北京市地铁运营有限公司运营二分公司,100043,北京;3. 中车长春轨道客车股份有限公司,130062,长春∥第一作者,工程师)
地铁列车牵引控制系统通常为车控、架控和轴控中的一种或两种组合设计。例如,牵引时采用架控、制动时采用车控的混合控车模式:为提高可靠性、降低因牵引动力损失过多带来的运营风险,牵引时采用架控;为配合制动厂家的车控制动系统,电制动时采用车控[1-2]。
混合多模式列车牵引控制软件在传统的单核控制平台上开发难度大。地铁新型驱动控制单元(DCU)采用多核心、多任务、多板卡协同式工作的架构,混合式列车牵引系统软件在该平台上通过采用功能划分的信号控制流实现架控控制信号的解耦和车控控制信号的耦合,从而满足列车控制要求,降低耦合故障的影响,软件架构也更明确、清晰。
1 列车牵引控制模式
车控、架控和轴控3 种控制模式有多种列车牵引电路结构[1-3]。
在图1 ~4 中,PU 是指驱动1 台或多台并联电机的牵引三相逆变器。地铁车辆的常规布局是每辆车2 台转向架,动车转向架包含了2 根装有牵引电机及齿轮箱、联轴节等传动装置的动轴。采用车控时,PU1 同时驱动动车上所有4 台电机,如图1 所示;采用架控时,PU1、PU2 分别驱动2 台动力转向架上的2 台电机,如图2 和图3 所示;采用轴控时,PU1、PU2 各驱动1 个动轴上的1 台电机,如图4 所示。
列车牵引系统车控方式,每辆动车配置1 台PU、1 台HB(高速断路器)、1 台牵引滤波电抗器、1套主接触器及预充电单元、1 台DCU。
采用架控模式时,列车牵引系统高压回路主要有2 种配置方式:
1)第1 种:配置了2 个PU(PU1 和PU2)、2 台HB、2 台有2 个独立线圈的滤波电抗器、2 套主接触器及预充电单元、2 台DCU,在该结构中2 个转向架的牵引系统完全独立。
2)第2 种:配置了2 个PU(PU1 和PU2),1 台HB、1 台集成2 个独立线圈的滤波电抗器、2 套主接触器及预充电单元、1 台DCU。该结构和第1 种相比共用HB、DCU 等设备,因而在综合故障率和成本上,具有优势。
架控牵引系统多采用上述第2 种配置,如采用时代电气牵引系统的北京燕房线、北京地铁9 号线,采用四方所牵引系统的北京地铁1 号线、八通线和青岛地铁11 号线等。
轴控牵引受车辆空间的限制,一般配置2 个逆变器箱,每个箱内布置2 个PU。永磁牵引系统一般为轴控方式。
因关键器件共用,列车牵引系统架控模式的第2 种配置方式的控制软件设计较为复杂,本文对此做重点研究。
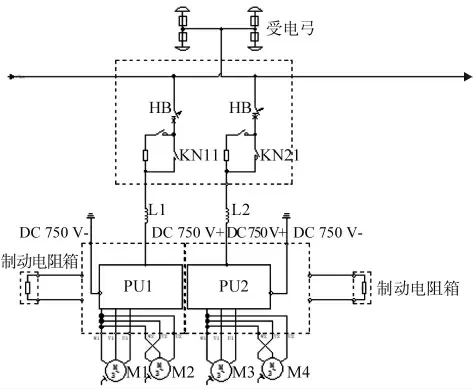
图2 典型架控原理图(独立HB)
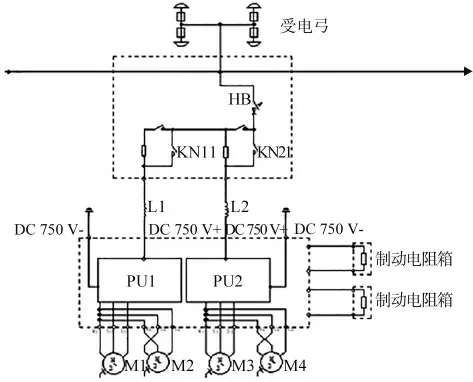
图3 典型架控原理图(共用HB)
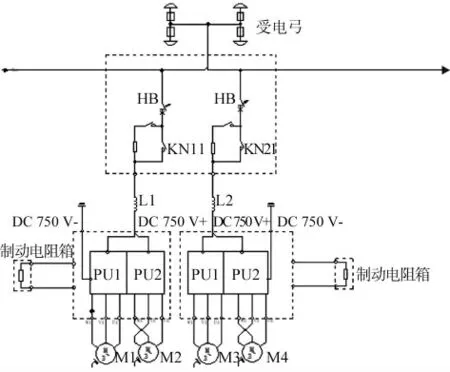
图4 典型轴控原理图
2 地铁新型DCU 架构
为适应多任务、高性能及复杂的工作环境,地铁新型DCU 采用DSP(数字信号处理器)+FPGA(可编程逻辑处理器)+ARM(嵌入式微处理器)的硬件平台架构,是当前工控领域嵌入式控制主流平台。它拥有高速的运算能力和丰富的外围设备,接口功能可灵活地配置和定义。新型多任务、多核心、板卡式协同工作的DCU 架构见图5 所示。
DCU 的处理器板卡采用多核心、分布式工作模式,核与核、核与外围接口板卡间的重要实时控制信号通过高速并口通信协议进行交互,过程信号通过CAN(控制器局域网)总线进行通信。
ARM 采用QNX 嵌入式操作系统,主要完成逻辑控制、对外通信管理、人机交互界面、慢速故障记录等功能;DSP 设计为DSP1、DSP2 双核心,主要完成电机矢量控制算法、DSP 快速保护逻辑;FPGA 主要协调各芯片、板卡间的数据交互接口管理。
另外,PU 信号采样板(CCA4 板) 采用高速FPGA 设计,主要完成与核心控制相关的信号实时采样滤波、FPGA 模拟量信号快速保护、PWM(脉宽调制)脉冲生成和分配等。
总之,本架构可实现牵引变流控制、逻辑控制与保护控制、防滑防空转控制策略、故障记录诊断维护等。其为多模式牵引控制软件设计提供了优秀的软硬件平台。
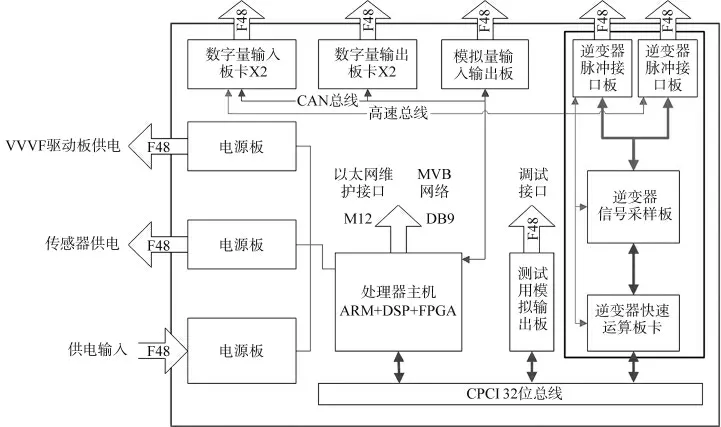
图5 地铁新型DCU 构架
3 混合式架控实现方案和控制策略
混合式架控在电路结构和信号控制流方面高度耦合,2 个转向架的牵引系统无法做到完全独立(上述第1 种配置除外)。
本研究将各类设备、控制策略、控制指令、信息交互和观测状态转换为信号流。使用系统属性做唯一标识信号进行功能划分,以实现独立的信号流控制和2 套控制系统的解耦和耦合,将耦合故障对运营的影响降到最低。
3.1 架控信息解耦
控制信号有多种系统属性,在研究电路结构的基础上本文为混合式架控牵引系统假设2 个基本的系统属性:PU1 系统属性和PU2 系统属性。这2 个属性分别对应该列车的动力转向架1 的牵引系统和动力转向架2 的牵引系统,在定义上这2 个系统属性完全独立。
使用图解法将各设备、信号等划分为PU1 系统和PU2 系统。通过识别对象的系统属性,分类结果如图6 所示。由图6 可知,牵引系统的大部分设备、控制算法、控制指令、信息交互和状态都被唯一的标识为PU1 系统属性和PU2 系统属性,但HB、DCU 为PU1、PU2 这2 套系统所共有,不具有完全独立的属性。
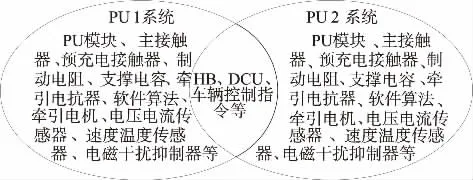
图6 混合架控信号属性图解
HB 作为保护动作设备应当强调主动保护的特性,减少PU1、PU2 两个系统对该设备的操作,只需做到上电合闸、跳闸后可复位合闸的操作即可。由于牵引系统高压回路短路的概率很低,并且PU1、PU2 2 个系统对HB 基本不做操作,可认为HB 对PU1、PU2 2 个系统的耦合性基本没影响。
对于DCU 而言,尽量从软件、板卡配置等方面入手,减少PU1、PU2 这2 个系统的共用属性。虽共用1 个机箱,但DCU 内部的I/O(输入/输出)模块、电机算法等均可以配置在独立的板卡或者DSP 芯片上。逻辑算法运行在ARM 的QNX 操作系统上,软件设计在逻辑处理、信号定义时可运行2 套独立的进程。信号处理板卡上的FPGA 在执行快速保护时各通道独立运行。DCU 具体的功能划分见图7。
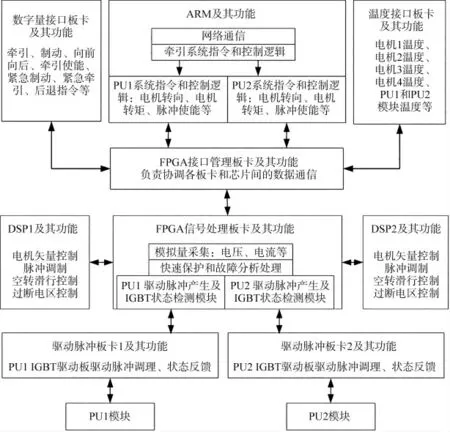
图7 DCU 功能划分
3.2 列车牵引时架控模式的信号流
列车牵引采用架控模式时,控制系统信息基本在各自PU1、PU2 系统内流动,交互的信息较少,具有独立性。此时PU1 的信号S1、PU2 的信号S2 流向分析如图8 所示。
从以上分析可知,HB 和DCU 虽共有但不影响2 套信号流的独立性,S1 和S2 基本独立而不耦合。在图8 中,S1 和S2 分别源自2 套独立的控制逻辑,经过DSP 算法运算后控制PU1、PU2 驱动对应转向架上的电机。在一个转向架的牵引系统故障时,另一个转向架牵引系统不受影响;转向架牵引发生空转时,只有本架上的牵引系统性能降低,另一台不受影响,保障了列车的动力性能,架控的优势得到发挥,提高了线路运营效率。
3.3 列车制动时车控模式的信号流
列车牵引系统硬件按架控设计,但车辆电-空配合时需满足制动系统的车控方式,这种矛盾的配置存在2 套系统如何实现耦合统一的问题:①2 套独立模式的制动力如何协调分配;②2 套模式的电制动有效、可用、切除、故障隔离等状态如何做到同步。
3.3.1 制动力协调分配
2 个转向架PU1、PU2 系统在给定相同制动力需求值的条件下电制动力的发挥会不一致,尤其在触发滑行、制动电阻冷热不均时差异会更大,电制动力损失需要空气制动补充。在补充期间,正常的动力转向架在被动施加额外制动力,超黏着触发滑动故障的几率增加。
为此,本文研究了一种跟随式下垂算法解决2个动力转向架出力不一致的问题。该方法的本质是列车制动力指令需求值、PU1 和PU2 系统实际电制动力需求值与实际值之间的协调配合联动。需求不变,一个出力小,另一个会主动使功率下垂将制动力降低到另一台的水平。
需要列车空气制动补充时一般应采用如下的电空交叉混合方案[2-4]:
1)列车的动车BCU(制动控制单元)按照本车占全部动车载重的比例去申请电制动力。
2)电制动力之和满足全列车制动力时,不补充空气制动。
3)电制动力之和不能满足全列车制动力时,首先在拖车上按拖车载重比例补充空气制动,拖车所能补充的最大空气制动力与制动减速度有关。
4)当拖车空气制动补足后,剩余所需要补充的制动力将平均补充到各个动车上。各动车上补充的空气制动和本车电制动力之和受到轮轨黏着极限的限制。
根据以上分析结果,跟随式下垂法的下垂函数表达式为:

式中:
F2,1——转向架2 下垂处理后的制动力;
F1——转向架1 电制动力;
F2——转向架2 电制动力;
ΔF1——转向架1 电制动力下垂数量;
ΔF2——转向架2 电制动力下垂数量;
k ——下垂系数。
为简化设计本研究将下垂模型简化为线性函数,k 的取值为1/4。保证转向架2 的F2降低后在该转向架上总制动力不超过最大轮轨黏着力。
3.3.2 状态同步
制动时,1 个转向架电制动因故障隔离、外部切除指令等导致制动力切除,制动系统会在2 个转向架同时施加空气制动以保证制动减速度。正常转向架的电制动力和空气制动力的叠加会频繁触发车轮滑行甚至抱死,使车轮磨耗严重影响使用寿命。
因此,通过控制信号流将制动下的牵引系统配置为车控,实现2 个转向架电制动状态同步。同一车辆中当1 个转向架滑行时,2 个转向架就同时执行滑行防护逻辑;1 个转向架因故障切除,另1 个转向架也同时切除。
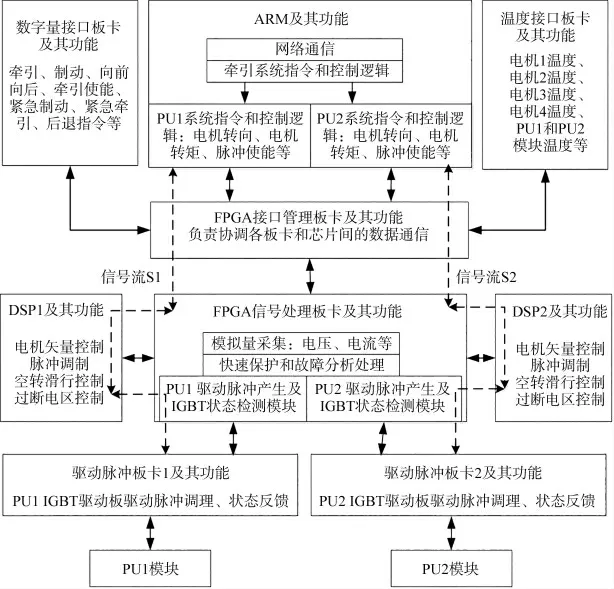
图8 列车牵引采用架控模式时的控制信号流向
4 结语
本文在研究混合式牵引系统的固有矛盾和特性后,在地铁新型DCU 架构上通过属性识别的方法将牵引系统划分为2 个独立的系统实现了系统的解耦,通过控制信号流的方向实现了牵引架控和制动车控的分离和统一的设计思路,同时通过跟随式下垂法和状态同步控制策略,解决了2 套独立的制动系统耦合所产生的关键问题,最大程度地降低这种配置所造成的车轮和闸瓦磨耗问题。
