一种智能AGV 小车工装系统设计研究
2021-02-04韩健睿吕世霞王学雷
韩健睿,时 光,吕世霞,王学雷
(北京电子科技职业学院,北京 100176)
1 概述
AGV(Automated Guided Vehicle)小车又称自动导引运输车,是一种集机械、电子、控制、计算机、传感器以及人工智能等多学科于一体的现代自动化装备,已广泛应用在自动化生产工厂、有毒有害环境、智能物流基地中,如汽车制造车间物料运送、焊接车间钢板运输、快递分拣等作业[1-7]。现今AGV 小车大多功能单一,需搭配其它生产线和工业机器人才能完成高难度作业,本文将AGV 小车、码垛机器人以及工装平台相结合设计了一种智能AGV 小车抓取工装平台,对制造业未来发展、提高设备功能性、提升设备工作效率等有着重要意义。
2 智能AGV 小车工装系统介绍
本文以AGV 小车为平台,将AGV 小车、码垛机器人以及工装平台相结合设计了一种智能AGV 小车抓取工装平台,如图 1 所示,使原AGV 小车功能得到增加,提高了生产效率。智能AGV 小车包括小车箱体、底盘、驱动轮、剪刀式减震结构;本文在 AGV 小车上侧加装一台四自由度码垛机器人,该机器人可实现三轴平移和绕Z 轴的转动;在码垛机器人末端加装视觉系统,实现对工件位置的识别与定位;抓取工装包括传送带和置物台等装置。
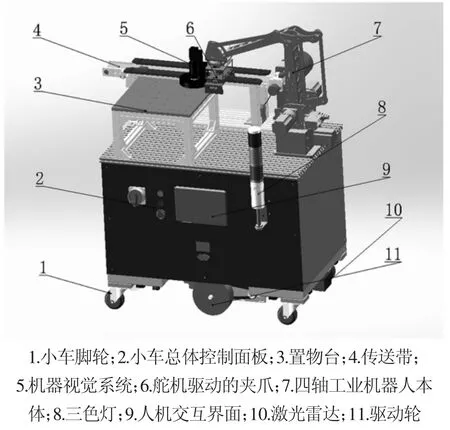
图1 小车整体机械结构三维图
2.1 车体结构设计
本文所设计的智能AGV 小车由驱动部分、减震部分、底部焊架、小车箱体、控制模块、操作模块等六部分组成,通过两轮差速运转。为提高AGV 小车行驶时车体横向稳定性,将小车两轮差速驱动部分安装于小车中部,其他四个角安装万向轮辅助支撑车体,可实现小车原地转圈、小角度转弯、精确定位等功能。该智能AGV 小车使用减震性能较好的剪刀式减震结构,共4 根减震弹簧。底部焊架上安装红外光电传感器、编码器和激光雷达,可实现避障、行走距离定位和自主导航等功能。控制模块和操作模块由西门子S7-1200PLC 控制器、人机交互界面HMI、开关按钮、三色指示灯等元器件组成,如图2 所示。

图2 小车结构三维图
2.2 智能AGV 小车抓取工装平台
上述AGV 小车只能进行物料运输,柔性和效率较低,需与其它设备相结合才能实现更智能化功能。为提高其智能性,在AGV 小车上平台安装抓取工装平台,抓取工装平台由四轴码垛机器人、传送带、视觉系统、置物台等构成,如图3 所示。四轴码垛机器人末端执行器可实现三维移动和绕Z 轴的转动,在码垛机器人末端执行器上安装视觉系统,可实现对工件形状、位置的识别,当小车运行至取料点时,通过码垛机器人末端视觉系统对物料位置和形状进行检测,并且通过MODBUS 总线与主控PLC 进行通讯,实现数据交互,通过PLC 控制器实现对所需工件进行抓取,置物台上可暂放工件或实现对工件的装配操作;传送带可将工件按照一定顺序传送到其它工作站,为自动化生产工作站与工作站间衔接提供便捷。
3 智能AGV 小车工装平台控制系统

图3 智能AGV 小车抓取工装结构图
智能AGV 小车抓取工装平台控制系统包括:PLC 控制模块、激光雷达传感器模块、工业机器人控制模块、视觉识别模块等,如图 4 所示。AGV 小车控制器选取西门子S7-1214PLC,S7-1214 PLC 搭配数字量输入输出模块、模拟量输入输出模块,能够满足对系统运行稳定性要求,可实现对AGV 小车的自主运行和定位的控制;AGV 小车上方安装的四轴码垛机器人可完成货物的灵活抓取和存放;码垛机器人末端视觉系统可实现对物料的分类和位置识别。小车运行模块由步进电机和编码器构成,PLC 向步进电机驱动器发送运动命令,通过两轮差速实现小车运行功能;小车避障系统采用激光雷达和红外光电传感器对障碍物进行识别,信号通过TCP 传回至PLC 实现小车的避障运行;当小车准确到达指定位置后,通过视觉系统识别货物位置,以保证机械手能够准确抓取货物,并分类摆放至置物台或传送带上;传送带将码垛机器人所拾取到的工件运送至相对应工作站。
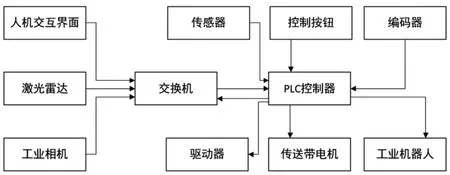
图4 智能AGV 小车抓取工装平台控制系统图
3.1 AGV 小车驱动系统
传统AGV 小车一般采用磁条导航,两轮驱动,两轮随动,通过差速控制实现小车运动功能。本文设计的智能AGV 小车两驱动轮采用步进电机驱动,两驱动轮置于车中位置,车体四角采用万向轮进行支撑与随动,同时后置两编码器轮记录小车整体运行方向,编码器可对小车行驶路线进行校正、定位、反馈等。与传统AGV 小车相比,本设计小车运行更加灵活,着地面积更大,适应道路更多,定位更加精准,偏离运行位置后可自动校正,提高了小车应用场景和运行灵敏度。
3.2 避障系统
激光雷达是一种通过发射激光束以探测目标位置、速度等特征量的雷达系统,其工作原理是向目标物体发射激光束,然后将反馈回来的信号与发射信号进行比较,进而获得目标位置的关键信息,如距离、方位等参数。本文所设计的AGV 小车通过激光雷达可实现对小车运行方向上的障碍物等目标进行探测、跟踪和识别。激光器将电脉冲变成光脉冲发射出去,当小车前方有障碍物时,光接收机把从障碍物反射回来的光脉冲还原成电脉冲,由TCP 传输至PLC 后对小车进行控制,小车同时搭配红外光电传感器可对小车四周物体进行扫描,从而实现小车转向避障的操作。
4 结论
(1)本文设计了一种自动导航AGV 小车,该小车可按照一定路线自动运行、自主避障;AGV 小车上平台加装四轴码垛机器人、传送带和置物台,可实现对工件的自动识别、抓取、装配、暂存、传送等作业。
(2)对自主导航AGV 小车抓取工装平台控制系统进行了设计,通过PLC 向各执行部分输送运动命令,实现对整个系统的运动控制。
(3)通过激光雷达和红外光电传感器对障碍物进行识别,并将信号通过TCP 传送至PLC,实现小车的避障运行。
(4)上述自主导航AGV 小车工装系统可广泛应用于自动化工厂或自动化物流基地,对制造业未来发展有着重要意义。
