浅析KCS305随动罗盘系统告警旗不收故障原因
2021-02-03李波张晓军
李波 张晓军
摘要:介绍了KCS305随动罗盘系统工作原理及告警旗控制电路原理,通过对KCS305随动罗盘系统中旗标控制电路、800Hz基准发生器电路、误差检测器电路、随动脉冲发生器等电路的分析,浅析了该系统告警旗不收故障的原因。
關键词:KCS305随动罗盘系统;告警旗;故障
Keywords:KCS305 servo compass system;warning flag;fault
0 引言
KCS305随动罗盘系统向ARINC标准航向指示器、自动飞行控制系统和飞行指引系统提供主要的航向数据,驾驶员操作控制器件可以对系统的性能进行选择和控制。随动罗盘系统由KSG105方位陀螺、KMT112磁传感器和KA51B随动控制器三部分组成。
KCS305随动罗盘系统常见故障是告警旗不收,该故障表现在信号输出到无线电磁指示器时,系统稳定后告警旗不收;在随动、自由状态下操作随动控制器,随动结束后告警旗不收。本文主要研究告警旗不收的故障原因,并提出了排除方法。
1 系统工作原理
KCS305随动罗盘系统利用方位陀螺三自由度陀螺仪在空间保持一定方向的特性和磁传感器相对地磁场位置变化而产出信号的特性来测定飞机航向。
KA51B随动控制器上的随动表指示KSG105方位陀螺与KMT112磁传感器之间的随动误差,“SLAVE(随动)/ FREE(自由)”开关可使系统处于“方位陀螺”或“自由陀螺”工作方式。 KSG105方位陀螺的双套(ARINC标准)同步发送器由同一步进电机机械定位,该电机由陀螺万向支架的轴编码器发出的脉冲信号进行程序控制,通过磁传感器控制变压器发出误差信号驱动步进电机,使方位陀螺始终对准磁北。
2 告警旗控制电路原理
当KCS305随动罗盘系统航向校准稳定后或航向随动结束后,告警旗收起。在校准或随动过程中,由磁传感器控制变压器发出误差信号来驱动步进电机,使方位陀螺协调到磁北,发出“航向有效”信号,驱动旗标控制继电器控制警告系统的警告旗收起,同时同步发送器发出有效航向信号。
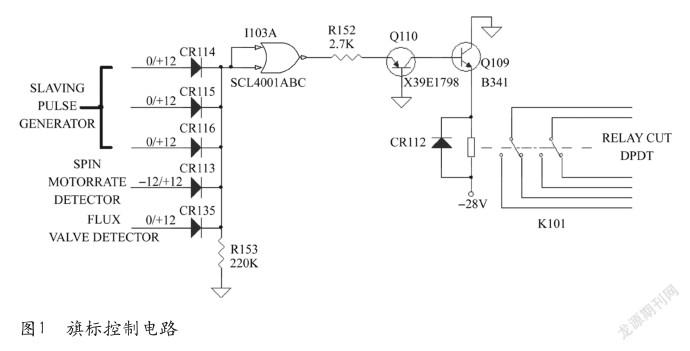
告警旗控制电路如图1所示,该电路前端接收来自SLAVING PULSE GENERATOR(磁修正脉冲发生器)、SPIN MOTOR RATE DETECTOR(旋转电机速率检测器)、FLUX VALVE DE TECTOR(误差检测器)信号,组成一个逻辑门。当所有监测信号正常时,逻辑输入端为低电平,发生一个“有效”输入,进而使旗标继电器保持接通,告警旗收起。
3 故障原因分析
针对警告系统警告旗不收起进行分析,“航向有效”旗标控制继电器受下述因素控制导致出现故障:
1)旗标控制继电器故障,无法进行旗标转换控制;
2)800Hz基准发生器无800Hz基准输出,无法输出陀螺航向信号;
3)误差检测器故障,无法进行快慢转换;
4)随动脉冲发生器故障,3种工作状态无法正常完成;
5)KMT112磁传感器故障,无法输出磁航向基准信号。
3.1 旗标控制电路
当电源加到KCS305随动罗盘系统时,选择方位陀螺状态,由KSG105方位陀螺提供的航向信号将自动按KMT112磁传感器发出的磁方向基准进行校准。校准结束后,告警旗收起。
旗标控制继电器K101为双刀双掷型开关,该继电器可向罗盘旗标控制提供警告时的触点闭合。如图1所示,当所有5个逻辑输入端为低电平时,发生一个“有效”输入。
CR114、CR115、CR116、CR113和CR135构成一个5输入的“或”逻辑门。如果前端5个输入中任意一个为“高”,I103的输出端将为“低”,Q110关闭,Q109的基本驱动电流不能使用。I103作为逻辑电平转换器使用。在“有效”状态期间,Q110和Q109饱和导通,因而继电器K101保持接通状态。
除了这5个输入控制以外,任何其他阻止K101线圈激励的故障形式也将引起警告旗标状态。检查以上电子元器件,如有器件故障,应更换相应元件;如性能合格,再根据以上分析检查K101的线圈阻值是否正常(正常阻值为650±20Ω),并检查继电器的常闭常开是否正常,如不正常,则更换继电器。
3.2 800Hz基准发生器
800Hz基准方波是从400Hz电源综合而成的,如图2所示,全波整流信号 Va通过R137和齐纳二极管CR118施加到开关晶体管Q103的基准极上。当Va超过齐纳管基准电压20V时,Q103导通。方波Vb由COS MOS变频器I104缓冲,将其调制用作800Hz解调器中的一个场效应管的激励。
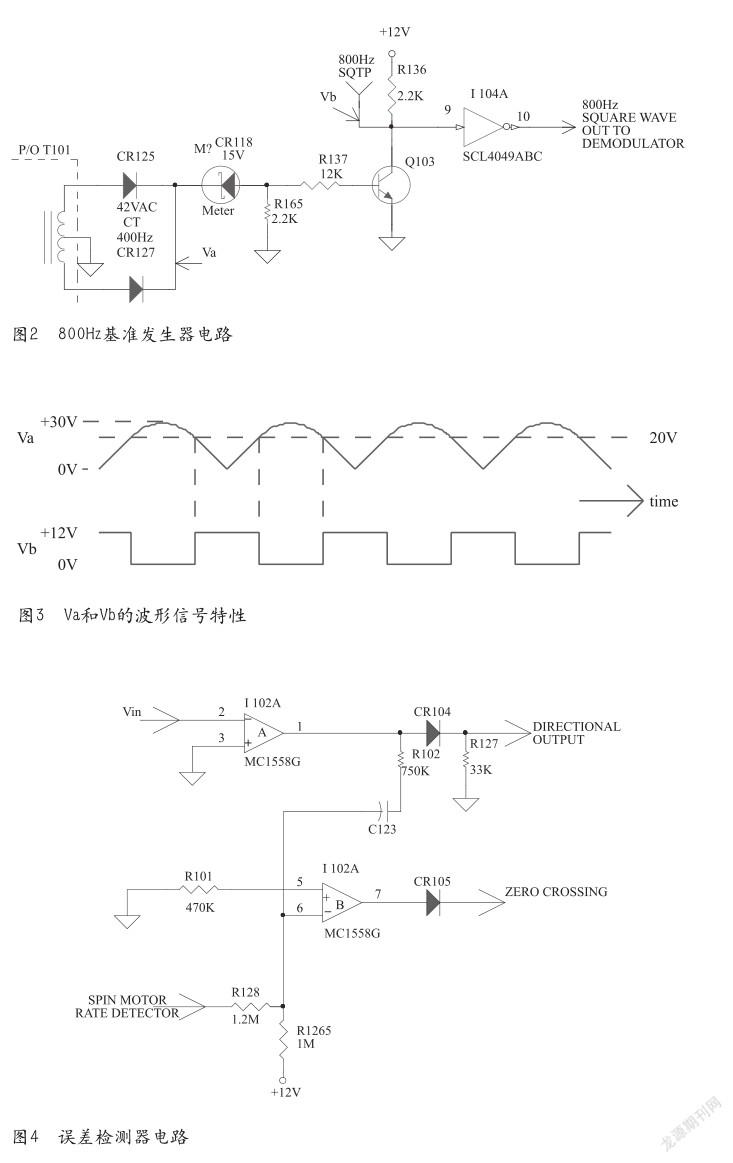
用示波器检查800Hz基准发生器电路中Va波形和Vb的800Hz方波是否符合图3的信号特性,若不符合则排除电路中相关元器件故障。若波形均正常,I104A集成块10号引脚无激励信号输出,则为I104A集成块故障。
3.3 误差检测器
误差检测器接收来自800Hz解调器和低通滤波器的直流输出信号。一个运算放大器用作一个极性检测器,以确定顺时针和反时针误差。如图4所示,这一输出通过C123连接到第二个运算放大器,以检测第一个放大器的极性变化。当第一个输出多次迅速变化时,表明陀螺在零位置来回快速随动,将会在第二个放大器的输出上产生一个电压,该电压用来将陀螺转换为慢速随动速率。
如果旗标控制电路和800Hz基准发生器电路均正常,且操作控制盒无法给定航向的顺时针和反时针的航向变化,检查此电路,并更换故障元件。
3.4 随动脉冲发生器
随动脉冲发生器将各种输入逻辑指令变为步进电机的控制脉冲。图5所示为三种手动状态控制线路:随动/自由、反时针和顺时针。这些线路的逻辑状态由驾驶员操作控制盒开关接通。另外,只要选择方位陀螺状态,来自误差检测器的两条线路允许连续自动随动,根据这五个输出可产生随动脉冲和方向指令。
逻辑门I103、I104和I105是工作在+12V电源的COS M03 4000序列。对几种工作状态下的输入和输出信号以“高”(+12V)和“低”(0V)逻辑电压的术语来说明。
二极管CR110、CR111和CR120组成一个模拟求和门电路,允许各种充电速率输至振荡器电容C112。选择串联电阻以便对不同的输入状态产生各种脉冲速率。
1)状态A:自由陀螺状态
在自由陀螺状态,随动/自由、反时针和顺时针线路都是低电平,因而3个二极管都是断开的,并且C112保持放电,使在I111插针3处的信号保持在高状态。由于没有脉冲产生,自动随动回路开路,与来自误差检测器的指令无关。
2)状态B:方位陀螺状态
在方位陀螺状态,随动/自由线路为高电平,通过R114启动振荡器。当这一线路首先启动时,闭锁I110输出插针3被作用到一个高电平,开始自动快速随动周期,而在I111的插针3处的随动脉冲速率通过R145给C112充电的电流来调定,该阶段通过R144的电流分配可忽略不计。当误差检测器给I110插针2提供足够高的电压后,输出插针3将转换到一个低电平,这样就通过I103将插入指针锁定到高电平。I111的插针3处的脉冲速率被降低,但仍通过R144给C112充电的电流来保持。快速及慢速随动脉冲速率分别约为16Hz和1/4Hz,这些脉冲确立了随动发生的速率。
当随动/自由线路转换回低电平时,I110将从慢速上升状态解锁,I103插针2转换到高电平,解锁I110插入插针3。
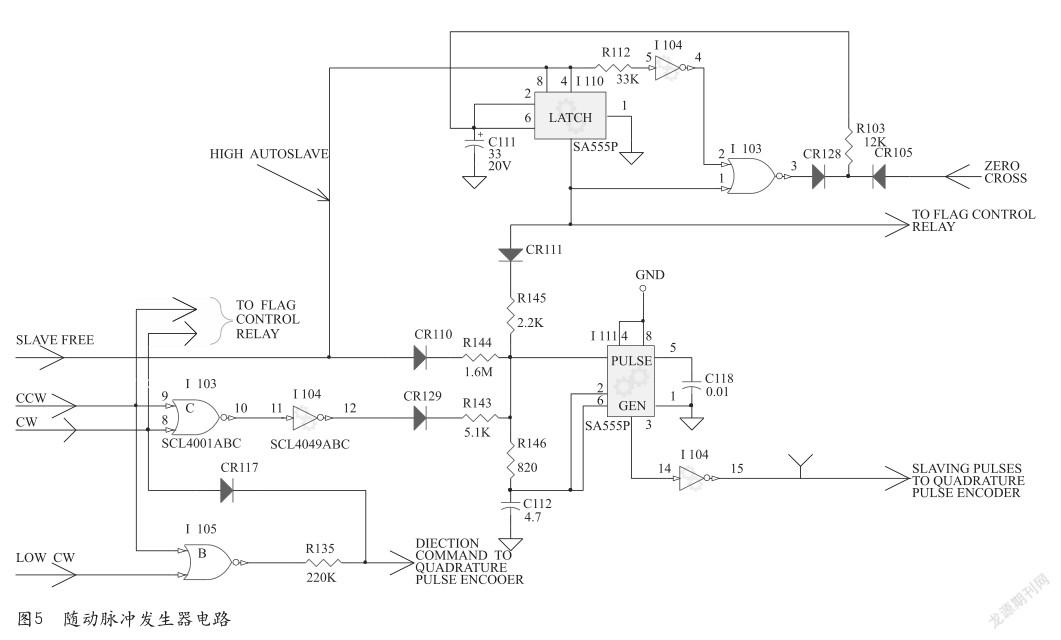
随动方向指令通过I103发送。输出方向逻辑“高”为顺时针,“低”为反时针,输出方向与驾驶员的水平状态指示器的上的航向方位牌转动有关。
3)状态C:手动调整
通过短时作用的面板安装开关将顺时针或者反时针线路提高到高电压,驾驶员将使振荡器工作于根据R143的值所确定的快速速率。
如果旗标控制电路、800Hz基准发生器电路和误差检测器电路均正常,且随动/自由无法选择,反时针和顺时针操作协调不到位无法停止,应检查此电路元器件,并更换故障元件。
3.5 KMT112磁传感器
KMT112磁传感器感受地球磁场的水平分量并将此分量传给KSG105陀螺,供长期修正用。如果KMT112磁传感器故障,KSG105陀螺无法得到有效的磁航向,告警旗会放下。
转动KMT112磁传感器,KA51B随动控制器的小指针应跟随转动。如不跟随,说明KMT112磁传感器故障。测量其插针A、B、D之间线圈阻值,正常阻值为200Ω±10Ω,若无阻值或超差,则需更换传感器。
4 总结
KCS305随动罗盘系统作为某机型的重要系统之一,结构复杂,电路部分对信号控制和传输影响较大,各分电路的联系较密切。本文对影响告警旗不收的主要电路部分進行了详细的分析和说明,对今后该系统告警旗不收故障的排除有一定帮助。KSG105陀螺仪为精密仪器,建议在产品接通电源前5min、断开电源后10min内不要搬动,以避免造成内部陀螺故障,产生误差。
作者简介
李波,工程师,主要从事航空仪表、航电专业的修理技术及航空装备保障等研究。
张晓军,工程师,主要从事航空维修工程管理及科研生产质量管理。
