无人倾转旋翼机直升机模式纵向位置控制律设计
2021-02-03梁天肖斯奇施啸宇
梁天,肖斯奇,施啸宇
( 南京航空航天大学 自动化学院,江苏 南京 210016)
0 引言
倾转旋翼机能够像直升机一样垂直起降与悬停,也能像固定翼飞机一样高速巡航,兼具直升机和固定翼的优点,与常规直升机相比,其飞行速度、航程都大幅增加;与固定翼飞机相比,无需长跑道,起降适应性强,其飞行包线涵盖了直升机和固定翼的范围。因为其优异的性能和良好的经济性,无论是在军用还是民用领域都具有广阔的发展空间。随着飞行控制技术的研究发展,无人倾转旋翼机也开始进入快速发展阶段[1]。
倾转旋翼机旋翼短舱与机体垂直时定义为直升机模式,直升机模式是无人倾转旋翼机飞行阶段不可或缺的一环,也是显著区别于固定翼飞机的特点。在起降、悬停或低速飞行时,其整机的升力、操纵力/力矩均来自位于左右机翼末端的两副旋翼,针对此模式的控制律设计具有工程上的实用价值。
目前,对于无人倾转旋翼机控制方案的研究关注度均集中在倾转过渡段,对于直升机模式的控制问题鲜有深入研究,而直升机模式的控制决定其起降性能。因此本文将通过分析直升机模式纵向特性,研究纵向位置控制律的控制策略,优化纵向位置控制律,并结合实时仿真验证控制律设计的鲁棒性。
1 建模与对象特性分析
1.1 建模
本文沿用实验室目前在旋翼类飞行器中所获得的技术积累,使用专业旋翼类飞机建模软件RotorLib,采用机理法进行建模。根据直升机空气动力学原理和机械运动原理,构建直升机模式的运动方程,描述其运动机理。利用动量理论和叶素理论计算旋翼气动力,并综合考虑了旋翼高阶运动特性和气动部件之间的干扰,对影响旋翼建模动力学特性的因素进行相对全面的处理。其建模结果目前已经历数个型号机型的试飞,具有较高的置信度[2-3]。
本文所采用的对象无人倾转旋翼机模型用欧美坐标系下的悬停状态数学模型形式为:
(1)
1.2 纵向模态分析
表1为直升机模式纵向特征根。

表1 直升机模式纵向特征根
俯仰阻尼模态物理解释为,若受扰动后做俯仰运动,俯仰角和旋翼迎角发生变化,然而旋翼具有较大的气动阻尼以及气动上机翼和平尾提供额外的俯仰阻尼使得俯仰角的变化快速衰减。
前向速度振荡模态主要描述了纵向速度和旋翼迎角的变化关系。比如当倾转旋翼机悬停时受到扰动产生前向速度,旋翼会由于相对气流发生后倒,整个旋翼产生向后上方的力。该力的水平分量使直升机前向加速度减小直至为0,而此时直升机前向速度达到最大值,旋翼相对气流速度也达到最大。因此旋翼继续后倒,此时旋翼产生升力的水平分量使直升机产生向后的加速度直至前向速度过零点之后反向,由于对象倾转旋翼机不稳定,因此反向最大速度会大于前向速度。以上的过程周而复始,最终发散,并且此模态耦合俯仰角和高度通道。可得出结论,对象无人倾转旋翼机纵向稳定性差,所以需引入俯仰角反馈与前向速度反馈,提高纵向的稳定性[4-5]。
观察纵向周期变距到角速率的开环频域响应(图1),低频段较小幅值增益反映出姿态跟踪能力弱,稳态控制精度低等,难以实现精确跟踪控制。因此可以预测在低频输入下响应特性差,抗干扰能力弱。频率响应特性的分析为控制律设计提供了理论依据。
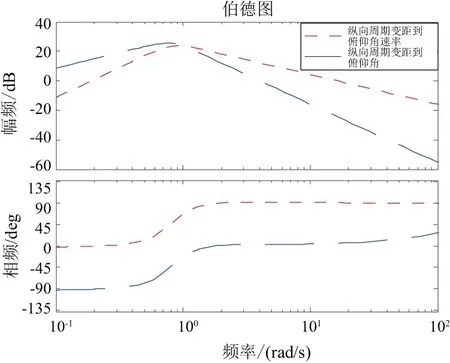
图1 开环频域特性曲线
1.3 控制需求分析
纵向位置控制的主要任务是控制无人倾转旋翼机的纵向空间位置,是直升机模式所特有的控制要求,ADS-33直升机飞行品质规范中对位置控制精度也有明确的规定[6]。在纵向通道上要保持纵向位置不变或者小速度前飞/后飞。按照两种要求将纵向分为保持状态和跟踪状态。保持状态的控制任务是保持纵向位置不变,跟踪状态的控制任务是实现无人直升机空间位置的小速度移动。
从纵向通道本身特性来看,存在俯仰阻尼模态和速度震荡模态,但是为确保位置响应的平稳性,位置回路阻尼比需要≥1.0。其次,需要具有较强的适应能力,才能够满足在不同环境下例如风扰动和信号干扰等情况下的控制性能要求。
2 纵向位置控制策略研究
2.1 基于姿态角阻尼内回路的位置控制
姿态阻尼内回路位置控制是使用增稳回路来提高系统稳定性,不进行姿态角跟踪控制。外回路采用位置保持与跟踪控制回路,为PID控制器,并且外回路被控量不产生姿态指令,直接输出到舵面进行控制[7]。控制律为
δe=δetrim+Kθ·(θ-θtrim)+Kq·q-
(2)
基于姿态角阻尼内回路位置控制对应的控制结构如图2所示。
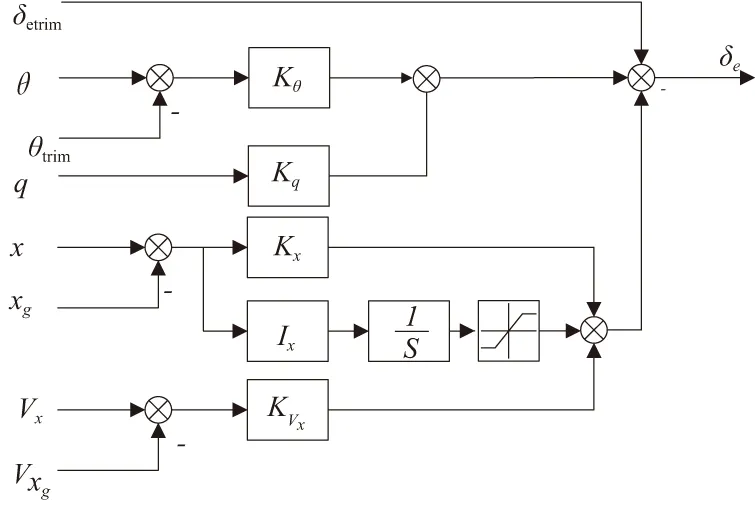
图2 基于姿态角阻尼内回路位置控制结构图
2.2 基于姿态角指令内回路的位置控制
姿态角指令内回路将位置回路产生的控制量转换为姿态角指令,通过内回路的姿态精确控制间接实现位置控制。此控制结构对姿态角内回路的控制精度的要求较高,因此需要引入姿态角积分量来保证控制精度。控制律为:
(3)
基于姿态角指令内回路的位置控制对应的控制结构如图3所示。
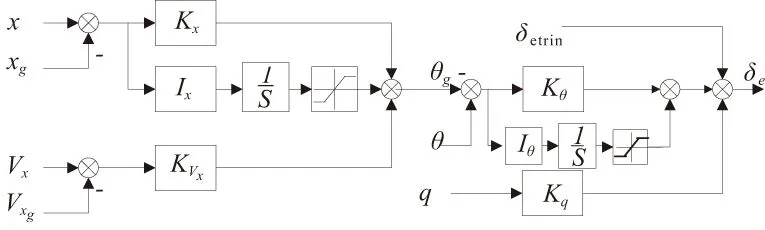
图3 基于姿态角指令内回路位置控制结构图
2.3 基于地速的高精度位置控制律
相比于姿态角指令,内回路的位置控制是通过内回路的姿态精确控制间接实现位置控制。基于地速的高精度位置控制律是通过地速的精确控制间接实现位置控制。内回路采用姿态增稳回路,提高姿态回路稳定性;外回路为地速控制回路,采用PI控制器实现地速保持与跟踪控制。
(4)
基于地速的高精度位置控制对应的控制结构如图4所示。
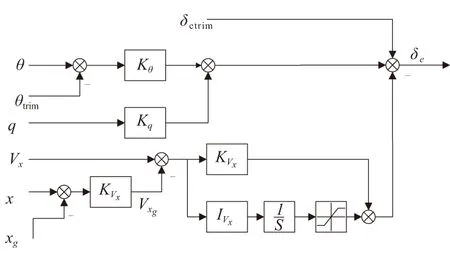
图4 基于地速高精度位置控制结构图
2.4 控制策略对比
首先基于姿态角阻尼内回路的位置控制避开无人倾转旋翼机姿态难准确跟踪的问题,工程实现较为简单,且姿态响应比较平缓,在此方面有利于降低机身震动。但是需要通过位置偏差建立新的配平舵面,其抗扰动能力较差。
基于姿态角指令内回路的位置控制因为通过姿态环建立配平状态,所以抗扰动能力较强,但是姿态控制难度大,工程实现较困难,且和姿态角阻尼内回路相反,姿态波动较大,容易加剧机体震动。
基于地速控制的位置控制姿态响应平缓,因为是通过地速控制来间接控制位置,精度更高,且抗风性更强。除此之外,在不接入位置环的情况下,地速控制还可以实现相对位置的悬停功能。
根据以上分析最终选择基于地速控制的位置控制律并进行参数设计和工程实现。
3 基于地速的高精度位置控制律设计
基于地速的高精度位置控制律内回路采用姿态增稳回路,外回路由两部分组成:地速控制回路和位置控制回路。可从内由外进行设计。
3.1 姿态增稳内回路
采用角速率和姿态角的姿态增稳内回路,回避了倾转旋翼机直升机模式悬停时姿态控制的难点。由于不需要进行精确控制,姿态内回路不需要加入积分项,仅采用比例和微分两项进行增稳,即可满足姿态增稳的要求。俯仰角速率的反馈能够快速抑制纵向短周期的俯仰角速率振荡,提高纵向短周期角运动阻尼;俯仰角信号也以并联形式接入增稳回路,用于弥补对象倾转旋翼机俯仰运动静稳定性的不足,改善纵向长周期响应的阻尼比。
倾转旋翼机纵向的动力学方程为
m(ax-Vyq+Vzr)+mgsinθ=Tsinθ
(5)
观察方程,俯仰角θ与纵向加速度ax存在比例关系,从而可以认为俯仰角是速度的加速度项。阻尼内回路选择的俯仰角系数越大,对地速控制来讲,阻尼越强,即抗干扰能力越强。但是过大的系数会导致出舵量较大,所以需综合考虑后选取参数。
从力方面考虑,如图5所示,除纵向周期变距改变引起的前向力,Δθ会让拉力在水平面产生前向分力TsinΔθ,此分力会产生前向加速度ax,俯仰角引起的前向加速度会引起前向速度的增加,从而使地速的响应加快。
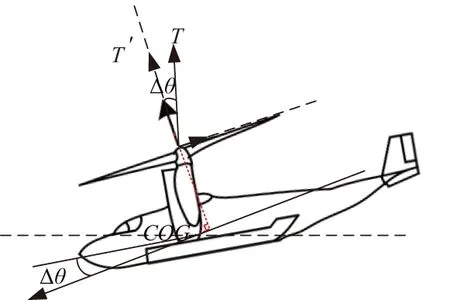
图5 改变俯仰角引起的力变化示意图
从图6可以看出,当内环接入俯仰角阻尼内回路后,比较原始纵向周期变距到纵向速度的开环频域响应,相位出现明显的超前调整,证明接入俯仰角阻尼内回路后,前向速度的响应变快,改善了地速回路的频域特性[8]。
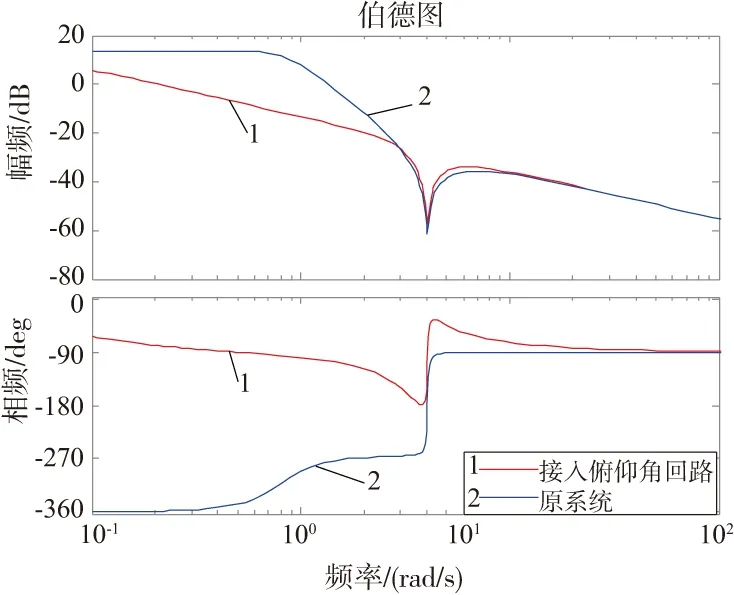
图6 接入俯仰角前后的速度频域响应对比
如图7所示,接入俯仰角后的根轨迹曲线,最终设计阻尼内回路参数Kq的值为0.2,Kθ的值为0.35。
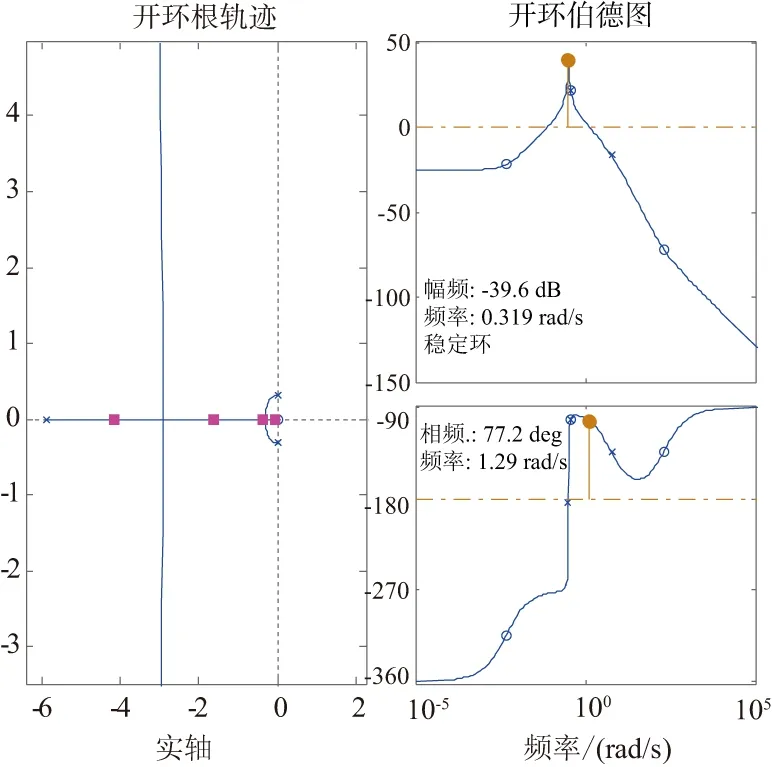
图7 接入俯仰角后的根轨迹图
3.2 地速控制回路
地速控制回路为地速偏差的PI控制,并且外回路对位置的控制实际上也是间接通过地速的指令值来进行准确控制的。所以在整个位置控制中,地速回路为绝对的核心。
地速回路的积分项设计,需要着重从整个地速回路的抗干扰能力来进行设计,在此基础上考虑整个地速通道的快速性和稳定性。
从图8的地速回路根轨迹来看,包含姿态增稳后的系统长周期稳定,在调参过程中可以发现,纵向速度积分增益越大,阶跃响应上升时间越短,系统响应越快。但过大的积分增益同时导致系统的动态响应性能变差,速度振荡变大,需要加大比例增益抑制振荡,整个响应的调节时间变长。减小积分增益可以改善纵向速度响应的振荡,但同时其响应速度也变慢,上升时间变长,系统跟踪能力弱,综合考虑系统调节时间和超调振荡等因素,将速度控制回路的系数定为KVX=0.9,IVX=0.12,此时纵向速度的阶跃曲线如图9所示。从阶跃响应图中可以看出,纵向速度阶跃响应超调很小,调节时间为7s左右,系统响应性能比较理想。
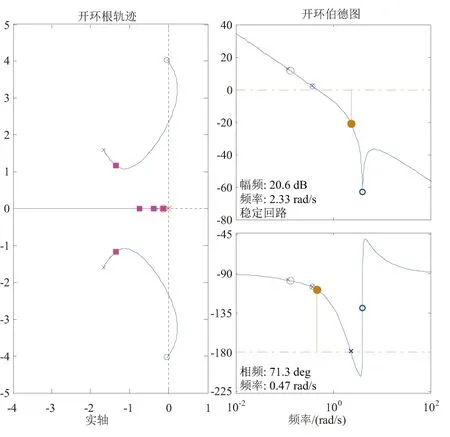
图8 地速回路根轨迹曲线
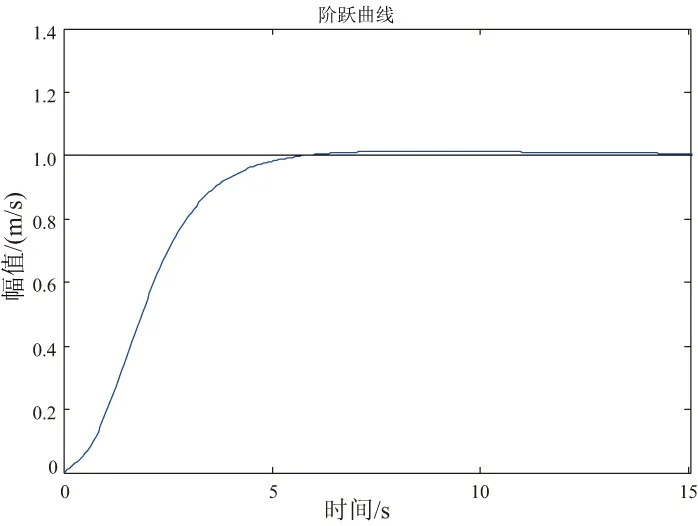
图9 地速回路阶跃响应曲线
3.3 位置控制回路
地速控制回路仅解决地速跟踪的问题,对绝对位置的跟踪需要位置回路的加入。位置控制结构较为简单,将位置偏差信号给到速度指令值进行控制即可。
位置控制最终达到的目标是满足位置响应的准确性和平稳性[9]。结合图10最终的时域阶跃响应进行参数选择Kx=0.18。
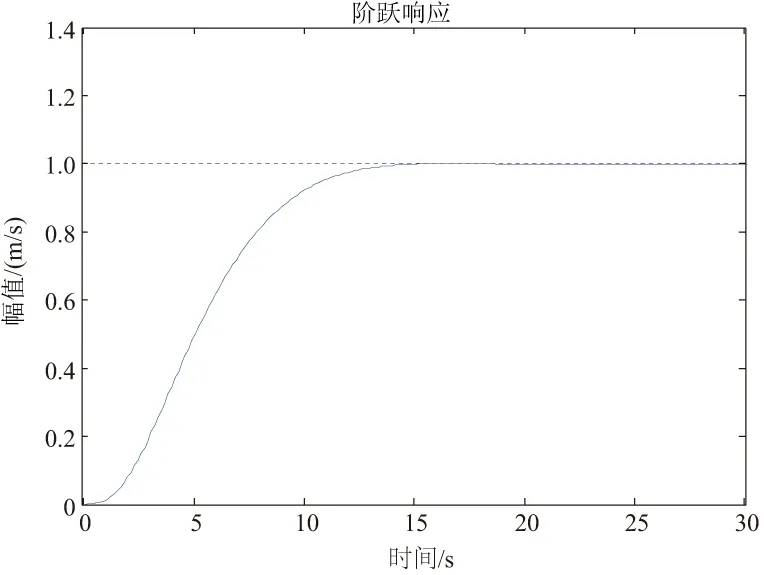
图10 位置回路阶跃响应曲线
4 仿真性能验证
无人倾转旋翼机直升机模式位置控制的主要问题之一是其在悬停飞行模态时,对大气扰动的抵抗能力不足,容易出现较大的控制误差。因此,本文着重针对这一问题,设计仿真案例进行验证控制律设计的正确性[10-11]。
鲁棒性测试采用3种手段,分别是5m/s的常值风,幅值为8m/s的正弦风,最后模拟地速死区为0.03m/s。仿真结果位置偏差曲线和纵向速度曲线如图11-图13所示。
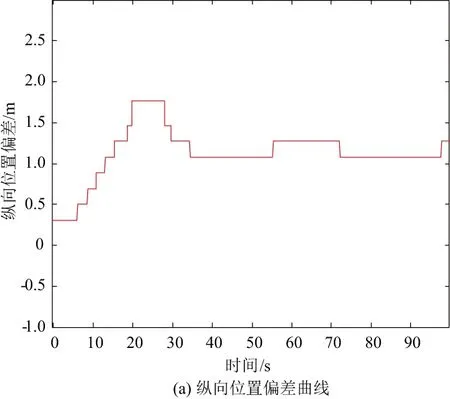
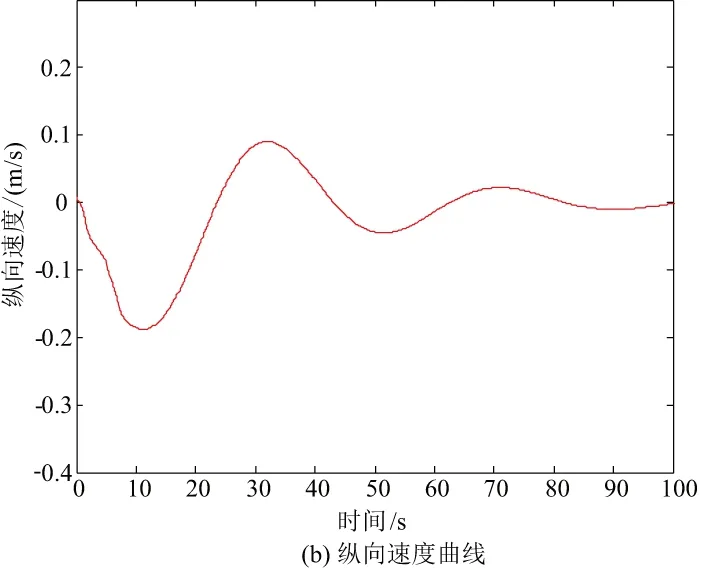
图11 常值风5m/s位置和速度曲线
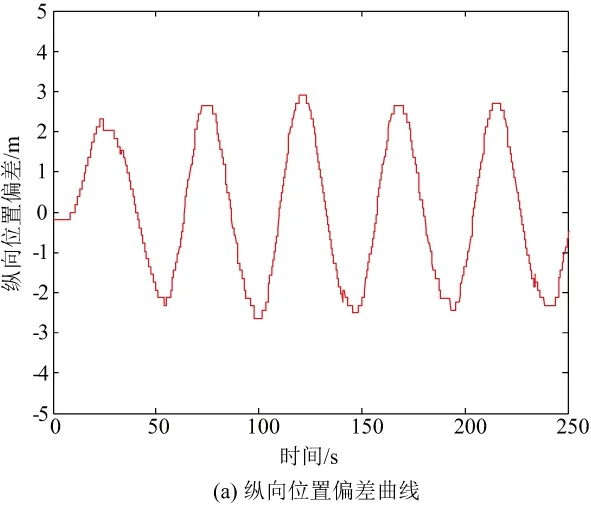
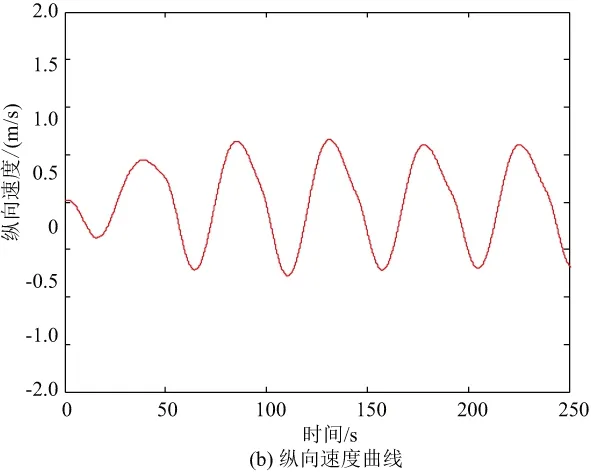
图12 正弦风8m/s位置和速度曲线
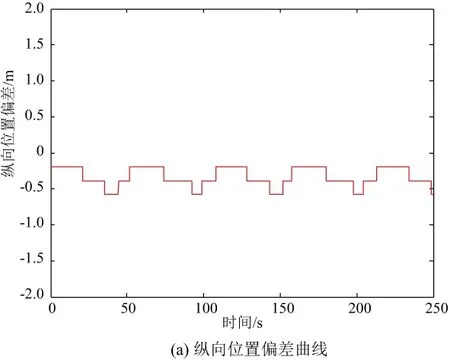
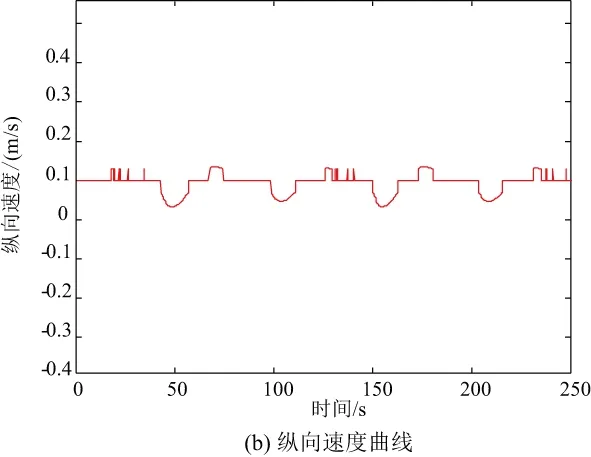
图13 地速死区0.03m/s位置和速度曲线
观察仿真结果曲线,基于地速的高精度位置控制律能够很好地完成纵向位置控制,且具有优秀的抗干扰能力。
5 结语
本文针对无人倾转旋翼机直升机模式的纵向位置控制,选取基于地速的高精度位置控制律为控制策略,从根轨迹和物理概念角度设计控制内外环参数,最终通过非线性仿真验证控制律的鲁棒性,完成了纵向位置的控制律设计。
