基于磁导航技术的气管插管装置设计及可行性研究
2021-02-03王荣峰张倩雲丁泓帆朱浩阳刘畅关正赵鸽王强吕毅
王荣峰 ,张倩雲,丁泓帆 ,朱浩阳,刘畅,关正,赵鸽,王强,吕毅
1 西安交通大学第一附属医院,西安市,710061
2 精准外科与再生医学国家地方联合工程研究中心,西安市,710061
0 引言
2019年12月以来,新型冠状病毒肺炎(COVID-19)疫情的大爆发,引起国际社会的广泛关注[1-2]。重型和危重型患者容易出现不同程度的呼吸困难和低氧血症,对于呼吸衰竭的患者实施气管插管机械通气治疗是一项重要的救治措施。然而在紧急情况下的气管插管,由于状况紧急、准备不完善等因素,其成功率较低,并发症风险较高[3-4]。但在可视化引导的气管插管过程中操作者离患者口鼻很近,几乎口对口。在为重大传染病如新冠肺炎危重症患者的抢救以及传染病人手术实施气管插管时,操作者存在很大的职业暴露风险,且笨拙的防护服、容易雾化的护目镜等防护设备一定程度上增加了气管插管的操作难度。
医疗机器人是目前正在迅速发展的一个领域。人们越来越多地认识到在临床实践中使用自动化系统所带来的潜在好处,提供更标准化和更有效的医疗服务,使操作员更容易、更安全。机器人应用于气管插管方面的研究络绎不绝。2010年,TIGHE及其同事利用达芬奇手术机器人系统的机械臂,将纤维支气管镜成功置入模拟人的气管中,完成机器人气管插管理论可行的操作[5]。2012年,HEMMERLING等[6-7]研发了开普勒气管插管系统,这是世界上首次利用常规的机械臂夹持视频喉镜在模拟人身上演示使用机器人气管插管,并首次应用于临床。2018年,海军军医大学研制的遥操作气管插管机器人系统采用主从机器人模式,在开普勒插管系统的理论基础上,研究了远程操作的机器人气管插管,目的是远程协助前线急救[8]。2020年,BIRO等[9]利用了计算机图像自动识别技术,实现了纤维支气管镜尖端方向的自动调节使其正对声门,为经喉部成像技术的机器人气管插管研究提供了图像处理基础。但是,上手气管插管机器人的解决策略主要为使用机械臂代替手工操作,而机械臂的灵活性及精确性仍待提高,仍未解决气道不确定性、复杂性的核心问题。
磁外科利用“非接触性”磁场力的特点,创新了诸多临床新技术,磁导航技术是利用体外磁场牵引带动体内的响应磁体或顺磁性物质沿预设的移动路径达到目标位置的技术[10]。磁导航技术在组织活检[11]、心内膜导管消融和胃肠道胶囊内镜检查[12]等方面的可行性已得到验证,具有广阔的发展前景。本团队基于磁导航技术的磁场环境和磁力转向的独特性,在国内外首次提出将磁导航技术应用于气管插管中,设计了一种磁导航气管插管装置,并进行了初步的可行性研究,旨在提高气管插管成功率,减少医护人员职业暴露风险,并为研发气管插管机器人提供关键技术。
1 设计思路
基于磁导航技术设计体外气管插管磁导航装置,磁性引导条依据刚-柔-软的设计理念,引导条前端为响应磁体,将磁性引导条沿着生理腔道送入到咽喉部,其前端响应磁铁在颈部磁导航装置磁场力的作用下继续向前向上移动进入声门到达气管,再将气管插管沿着磁性引导条送入预定位置,完成气管插管。
2 基本结构
基于磁导航技术的磁导航气管插管装置基本结构包括两部分:磁性引导条、导航磁体。
2.1 磁性引导条
磁性引导条的结构设计如图1所示,由前端响应磁体、引导条本体、连接弹性结构、响应磁体前端的保护帽组成,直径为3 mm,长为700 mm。为了获得更大的磁力,响应磁体采用高性能钕铁硼永磁材料精加工而成,符合刚的理念。响应磁体的基本形状为圆柱形,直径为3 mm,长为16 mm。引导条本体是采用非顺磁性可塑形橡胶材料制成的空芯探条,符合柔的理念,直径为3 mm,长为680 mm,每间隔10 cm标有刻度。磁性引导条本体与响应磁体之间用弹性连接结构,外层使用薄层聚乙烯导管,内壁附着弹簧,长度控制在2~3 mm,在体外导航磁体磁场力的作用下响应磁体可发生偏转运动,保护帽为响应磁体前端包裹半球形软性材料,采用类似乳腺假体的硅胶材料,防止响应磁体对软组织造成机械损伤。
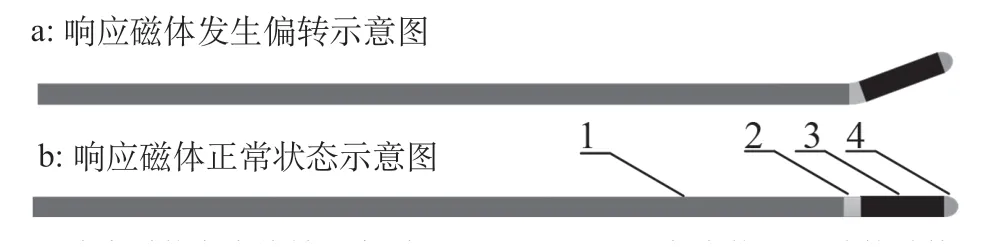
图1 气管插管磁性引导条Fig.1 Magnetic tracheal intubation guide wire
2.2 气管插管磁导航装置
气管插管磁导航装置的结构设计如图2所示,由导航磁体、两侧的辅助磁体、弧形支架、一级支架、二级支架组成,整体宽为200 mm,高为160 mm。为了获得更大的磁力,导航磁体采用高性能钕铁硼永磁材料精加工而成,导航磁体的基本形状为圆柱形,直径为60 mm,长为120 mm,主要是引导响应磁体发生向前向上的运动。两侧辅助磁体是长宽为50 mm,厚度为10 mm的矩形磁体,主要控制响应磁体在左右不发生偏转,保证响应磁体沿着矢状面发生偏转。颈部位于弧形支架内,为半径50 mm的弧形曲面。一级支架接触床面,宽50 mm,高100 mm;二级支架位于胸骨及两侧锁骨上,宽50 mm,高100 mm,避免压迫气道影响通气。图3为磁性引导条在磁导航装置引导下插入模拟示意图。
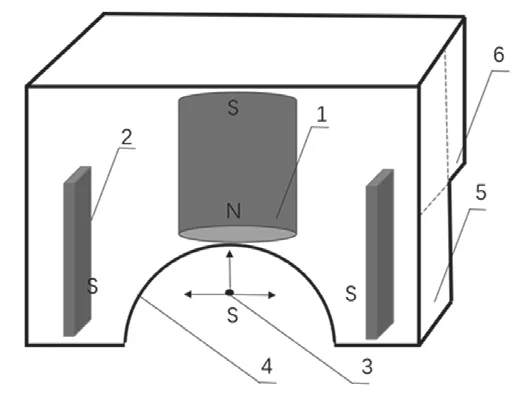
图2 气管插管磁导航装置Fig.2 Magnetic navigation device for tracheal intubation
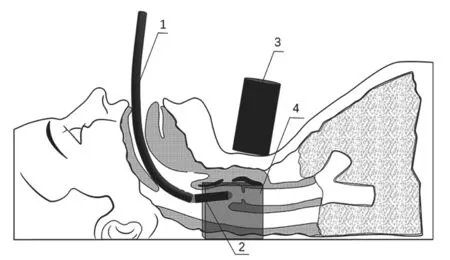
图3 磁性引导条在磁导航装置引导下插入模拟示意图Fig.3 The schematic diagram of the magnetic guide wire inserted into the simulation under the guidance of the magnetic navigation device
3 使用过程
磁导航气管插管操作方法:①将体外导航磁铁置于颈部,导航磁体上缘与模拟人喉结齐平;②将涂抹石蜡油的磁性引导条置入口腔,尽可能保持在舌根的中点进入咽喉部(图4 a);③由体外导航磁铁施加磁场力引导磁性引导条尖端的响应磁体向前向上运动,通过声门列后进入气管(图4 b),模拟人发出插管成功的提示;④移去导航磁铁,将气管插管沿着磁性引导条送入气管中段,拔出磁性引导条,固定气管插管。该操作简便迅速,避免了传统气管插管长时间反复试插过程中对咽喉和气管壁组织的损伤和刺激,及长时间缺氧造成的不可逆损伤,避免并发症,迅速建立呼吸通道,恢复氧供,抢救生命。

图4 磁导航气管插管装置应用效果示意图Fig.4 Schematic diagram of the application effect of the magnetic navigation tracheal intubation device
4 仿真模拟人实验
4.1 方法
使用高仿真气管插管模拟人,对磁导航气管插管装置可行性进行验证,应用效果如图4所示。共招募10名操作者参与研究,其中麻醉医师5名,非麻醉专业人员5名。如表1所示,非麻醉组人员仅进行磁导航气管插管,麻醉组人员需进行磁导航气管插管和直视喉镜下气管插管,每人需进行所要求插管操作25次。记录各自的插管时间、成功率,并用Likert等级评估插管难度。使用SPSS软件进行统计学分析,P值小于0.05被认为具有统计学意义。
仿真模拟气管插管实验效果对比,见表1。
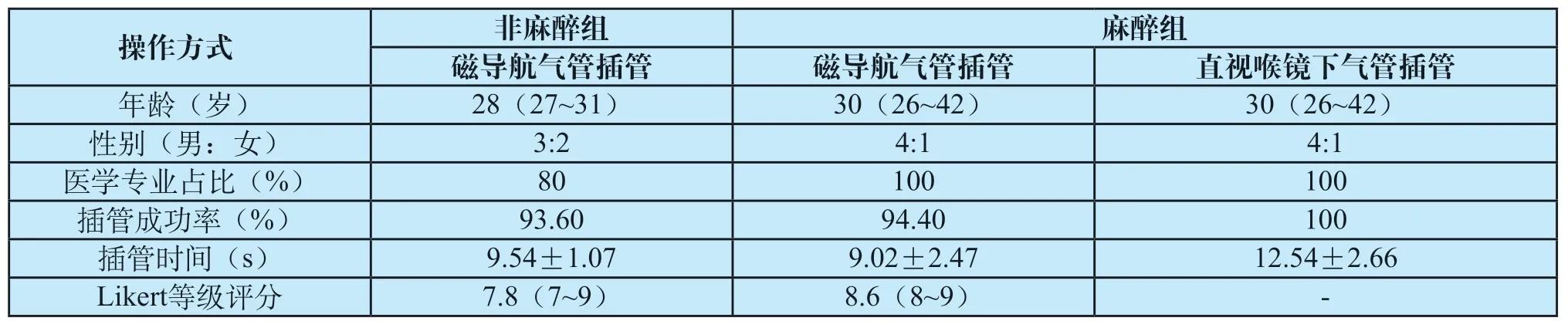
表1 仿真模拟气管插管实验效果对比表Tab.1 Comparison of experimental results of simulation and tracheal intubation
4.2 结果
其中,参与研究的操作者年龄差别不大,以男性居多。非麻醉师组有一位参与研究者不具有医学背景。非麻醉组磁导航气管插管成功率为93.6%(117/125);麻醉组磁导航插管成功率为94.4%(118/125);麻醉组直视喉镜下气管插管均获得成功。经两两比较,三组间气管插管成功率均不具有显著性差异。
磁导航气管插管非麻醉组和麻醉组的时间均小于10 s,磁导航气管插管非麻醉组时间为(9.54±1.07)s,麻醉组时间为(9.02±2.47)s,P=0.07,两者无统计学差异。麻醉组直视喉镜下气管插管时间为(12.54±2.66)s,与磁导航气管插管非麻醉组及麻醉组相比,所需时间较长(P均小于0.01)。
操作者按照从0(非常难)到10(非常容易)的Likert等级对磁导航气管插管进行主观评分,磁导航气管插管非麻醉组的主观评分为7.8分,磁导航气管插管麻醉组的主观评分8.6分,两者都偏向“易于操作”,且P=0.11,两者无显著性差异。
5 讨论
本研究充分证实了基于磁导航技术的气管插管的可行性,磁导航气管插管具有操作简单、快速、有效,学习曲线短等特点,磁导航气管插管技术可为气管插管机器人提供关键技术,除了应用于医院手术室、重症监护室等专业化场所,也可应用于机场、火车站等公共场所,可与除颤仪联合使用,在突发医疗事件的气道管理中具有重要意义。研究显示,在突发院外心脏骤停患者的救治中,紧急气管插管具有较高的入院生存率[13]。但是有近20%的病人在到达医院之前已经死亡,其中80%以上的死亡都是由于未能院前实施气管插管急救而造成的。突发救治仍以单纯的转送为目的,到达医院后错过了抢救时机。
依据磁导航技术可引导磁性引导条尖端磁铁在声门口发生向前向上的偏转运动进入气管。磁导航技术从根本上解决了因口咽部复杂结构或困难气道造成插管困难的问题。本研究属于国内外首次基于磁导航免喉镜气管插管的概念性研究,所有操作均在高仿真气管插管模拟人身上进行,其安全性在后期的研究中有待进一步验证。
总之,磁导航气管插管具有便捷性、高效性、双向(医患)安全性,可与传统的喉镜气管插管效果媲美。该技术有望广泛应用于院外患者救治时的气管插管急救,同时,磁导航气管插管技术可以作为气管插管机器人研发的关键核心技术。
