深调峰工况亚临界机组无自平衡对象控制器优化
2021-02-03刘暑辉
刘暑辉,田 亮
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引 言
随着风能、核能和太阳能等新能源发电的并网和用电侧负荷频繁变化,火力发电机组所承担的调峰调频任务日益加剧。其中在机组协调控制系统中当汽轮机侧闭环情况下,汽轮机前蒸汽压力控制系统为无自平衡能力对象,控制难度较大。当AGC指令频繁大幅变化时,导致此控制系统PID控制器输出端锅炉侧燃料量指令波动。燃料量波动会对深调峰工况下机组运行产生诸多问题,例如燃烧不稳定、磨煤机堵塞、氧量波动、局部循环恶化等,导致机组运行经济性和安全性降低[1-3]。如何在满足火力发电机组快速调峰调频情况下,降低锅炉侧燃料量波动成为了目前火电机组协调控制系统急需解决的问题。
有关这一方面的研究,已经有一些文献做出了有益的探索。文献[4]通过对机组模型进行化简推导,研究了一种基于火电机组简化模型计算PID控制器参数的方法,揭示了机组被控对象参数与PID控制器参数之间的关系。文献[5]通过推导直接能量平衡协调控制系统炉侧开环机侧闭环状态下燃料量对DEB热量信号的传递函数,据此对PID参数进行整定,证明了此方法在抗AGC指令扰动及燃料量扰动等方面相对于传统炉跟机协调控制系统具有明显优势。文献[6]推导出了典型被控对象调节时间与控制器最大输出量之间约束关系的公式,并结合亚临界机组协调控制模型得到了负荷扰动下燃料量变化与机前压力变化约束关系的公式。文献[7]构造了非线性微分环节代替原超前补偿环节,在实现相同控制目标时,此方法可以有效减小燃料量波动。文献[8]提出了模糊神经网络的一种改进方法,在线自适应整定PID参数。文献[9]将DRNN与PID控制相结合,同时利用混沌优化策略整定PID参数。
本文针对无自平衡能力对象控制困难,而汽轮机侧闭环情况下,汽轮机前蒸汽压力控制系统为无自平衡能力对象,压力扰动时,PD控制效果较好,在负荷扰动时采用PD调节为有差调节,增加积分改为PID调节则会使燃料量产生波动。本文针对此问题进行研究,借鉴在线学习,自动调整的思想,采用模糊神经网络PID控制,利用其自学习能力解决难以人工确定负荷扰动时何时进行积分切换控制的难题,以保证在满足控制指标的情况下,降低燃料量波动幅度。
1 亚临界机组模型
1.1 对象模型
文献[10]给出了典型亚临界机组简化非线性负荷-压力动态模型:
(1)
(2)
Cbdpd/dt=-K3ptuT+K1rB
(3)
KtdNE/dt=-NE+K3ptuT
(4)
pt=pd-K2(K1rB)1.5
(5)

1.2 模型线性化
将上式写成增量形式,利用小偏差线性化推导得到系统传递函数为
(6)
其中:
(7)
(8)
(9)
(10)
式中:uB0和uT0分别为工作点处的燃料量和汽轮机高调门开度。
2 无自平衡能力对象分析
2.1 简单一阶无自平衡对象特性分析
构建简单一阶无自平衡对象模型,施加幅值为1的阶跃信号,斜坡信号和外扰信号分别采用PD和PID两种调节器进行仿真,结果如图1所示。根据仿真结果可以看出,采用PD调节对于阶跃信号和斜坡信号控制效果较好,对被控对象后所加外扰控制效果较差。采用PID调节对于阶跃信号和斜坡信号控制效果较差,易于波动难以恢复稳定,对被控对象后所加外扰控制效果较好。

图1 简单一阶无自平衡对象仿真分析
2.2 炉跟机等效被控对象
典型2入2出亚临界机组炉跟机控制系统,采用燃料量控制汽轮机前压力,汽轮机高调门开度控制机组负荷。机组多采用炉跟机的控制方式,充分利用锅炉蓄热来满足快速变负荷指令,这种控制方式虽然能够快速跟踪负荷的变化,但是容易导致机前压力和燃料量的大幅波动。
如图2所示,汽轮机侧闭环情况下,汽轮机前蒸汽压力控制系统为无自平衡能力对象。此时原2入2出亚临界机组协调控制系统可简化为输入为燃料量指令,输出为机前压力,扰动为负荷指令变化的无自平衡能力对象。
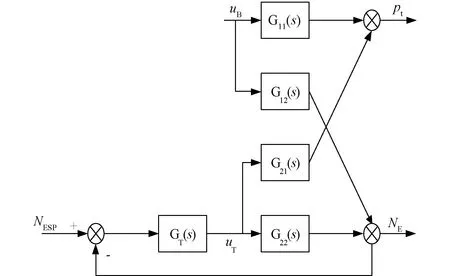
图2 无自平衡能力被控对象
根据梅森增益公式(Mason Gain Formula)推导可得燃料量(uB)对机前压力(pt)的传递函数如式(11)。
(11)
式中:GT(s)为机侧闭环回路控制器,一般为PI控制。
由于机侧回路能够快速跟踪负荷变化,可得其闭环回路如式(12)。
(12)
式(11)与式(12)联立得
(13)
将式(7)、(8)、(9)、(10)代入式(13)得
(14)
3 控制器优化
3.1 模型仿真
分别对火电机组协调控制系统炉侧控制器采用PD和PID控制器进行压力定值扰动和负荷定值扰动实验,其仿真结果如图3、4所示。火电机组炉跟机协调控制系统中,汽轮机侧闭环情况下,炉侧通过调节燃料量控制汽轮机前蒸汽压力,炉侧理想调节器为PD控制。图3为在200 s时加入-0.5 MPa压力定值扰动的模型响应曲线,图中可看出采用PD控制汽轮机前蒸汽压力动态偏差小,调节快速,但超调量过大。图4为在200 s时加入以0.2 WM/s变化-200 MW负荷定值扰动的模型响应曲线,图中可看出相对于炉侧机前压力控制回路,负荷变化属于外扰,由于控制器中的微分作用受外扰影响较大,PD调节抗外扰能力差。当负荷发生变化时,PD调节超调量过大,且为静态有差调节,无法满足机前压力跟踪设定值。相比于PD调节,PID调节能够减小超调量,且能够准确跟踪机前压力设定值,但调节速度较慢,波动持续时间较长。

图3 压力定值扰动
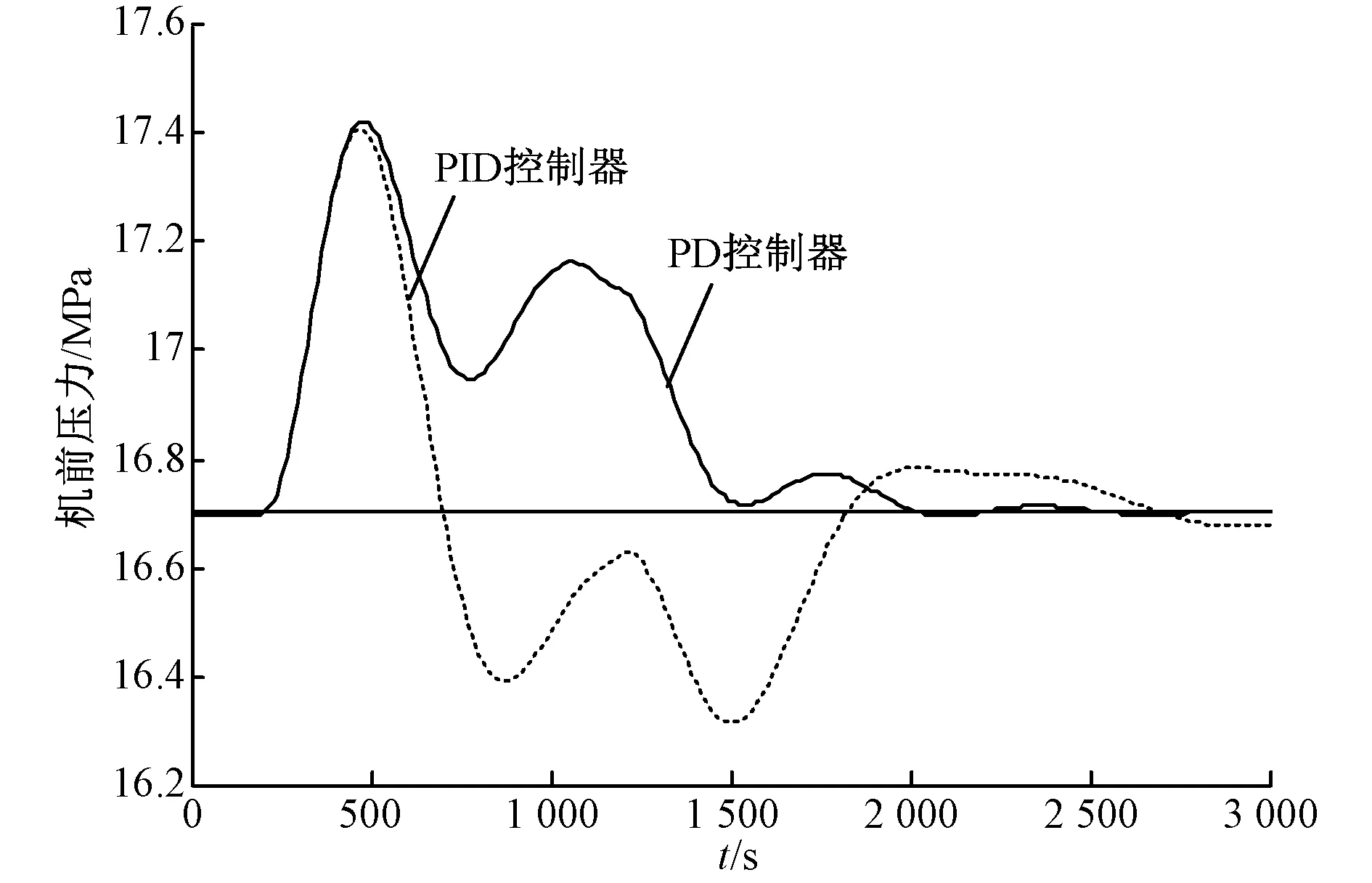
图4 负荷定值扰动
3.2 模糊神经网络PID控制器设计
针对上述问题,本文利用S函数编写模糊神经网络设计新的控制器对协调控制系统炉侧PID控制器进行优化改造。本文所采用的模糊神经网络PID控制系统结构如图5。ri(n)为n时刻控制系统设定值,yo(n)为控制系统输出信号,u(n)为经PID控制器运算后输出的控制信号,ek(n)、ek(n-1)、ek(n-2)为所在三个时刻的误差,KP、KI、KD为PID控制系数。

图5 模糊神经网络PID控制系统
本文以控制系统设定值和输出信号为输入,利用模糊神经网络的自学习能力,在线调整算法中高斯隶属函数的宽度和中心值以及输出层权值,实现PID参数在线自动优化,解决难以人工确定负荷扰动时何时添加积分控制的难题。
离散型增量式PID控制器的控制规律为
(15)
式中:u(k)为PID控制器在k时刻的输出;Δu(k)为PID控制器k时刻与k-1时刻输出的差值;e(k)为控制系统设定值与输出量在k时刻的误差;Δe(k)为k时刻与k-1时刻误差的差值;T为采样时间;TI为积分时间;TD为微分时间;KP、KI、KD分别为比例系数,积分系数和微分系数。
本文所采用的模糊神经网络为5层前馈网络,其基本结构如图6所示。

图6 五层前馈模糊神经网络
第1层:输入层,此层分别接收输入向量x=[x1,x2,…,xn]T各分量到各个节点,进而将输入向量传递到第二层。
输入:Ii(1)=xi
输出:Oij(1)=xij=xi
节点总数:N1=n
其中:i=1,2,…,n;j=1,2,…,m。
第2层:隶属度函数生成层,此层含若干神经元节点,即隶属函数,将变量模糊化。
输入:Iij(2)=Oij(1)
输出:Oij(2)=exp(vij(2))=Aij(xi)
其中,bij、cij分别是隶属函数的宽度和中心;mi是输入变量xi的模糊分割数;i=1,2,…,n;j=1,2,…,mi。
第3层:模糊推理层,此层神经元节点个数表征模糊规则数。其作用为计算规则适应性,
输入:Ii(3)=Oij(2)
诱导局部域:
vl(3)=Ai11(x1)×Ai22(x2)×…×Ainn(xn)
输出:Ol(3)=vl(3)=αl
节点总数:N3=m
第4层:归一化层,此层对网络结构总体进行归一化运算。
输入:Ii(4)=Ol(3)
输出:
节点总数:N4=m
其中,l=1,2,…m。
第5层:输出层,此层进行反模糊计算,输出KP、KI、KD的计算结果。
输入:Ii(5)=Ol(4)
输出:
其中,k=1,2,…,r。
对于本文:KP=O1(5),KI=O2(5),KD=O3(5)。
3.3 模糊神经网络学习算法
定义性能指标函数为
(16)
式中:ri(n)为n时刻控制系统设定值;yo(n)为控制系统输出信号;e(n)为每一次迭代的误差。
采用一阶梯度寻优算法调节wij、bij、cij可得其权值和参数的学习算法:
α(wij(n-1)-wij(n-2))
(17)
α(bij(n-1)-bij(n-2))
(18)
α(cij(n-1)-cij(n-2))
(19)
其中:i=1,2,…,n;j=1,2,…,mi,η为学习率,0<η<1;α为动量因子,0<α<1。式中性能指标函数ε对权值及参数wij、bij、cij的一阶梯度推导过程详见参考文献[8]。
实验过程中发现以上方法输出曲线超调量过大,本文特地对性能指标进行修正,引入超调量指标,修正后性能指标函数为
ε=k1S+k2emax
(20)

4 实验分析
利用某电厂亚临界机组运行参数,依据式(1)~式(5),确定其简化非线性动态模型如下:
(21)
(22)
6 000dpd/dt=-0.449 1ptuT+2rB
(23)
16dNE/dt=-NE+0.449 1ptuT
(24)
pt=pd-0.000 122 5(2rB)1.5
(25)
在MATLAB中利用SIMULINK搭建此模型并利用S函数编写所用模糊神经网络算法,在SIMULINK中搭建相应PID控制器,对本文所提优化方法进行仿真验证分析。模糊分割数为7,网络权值wij取[-1,+1]内随机值,隶属函数宽度bij为[0.8,0.4,0.2,0.1,0.2,0.4,0.8],中心cij为[-1,-0.7,-0.35,0,0.35,0.7,1],学习率η1=0.2,η2=η3=0.25,动量因子α=0.02,两指标函数权值k1=0.8,k2=0.2。分别对其进行负荷定值扰动分析和压力定值扰动分析如图7、8所示。

图7 负荷定值扰动

图8 压力定值扰动
负荷定值扰动分析:负荷以0.2 MW/s的变负荷速率下降200 MW,机组模型输出功率能够快速跟踪负荷指令下降,期间无超调和震荡,机前压力最大动态偏差小于0.75 MPa,能够在短暂波动后快速恢复稳定,其超调量和衰减率都满足机组运行要求。
压力定值扰动分析:压力定值阶跃下降0.5 MPa,实际压力能够快速跟踪压力设定值变化,最大动态偏差小于0.35 MPa,超调量和衰减率都满足机组运行要求,机组负荷最大动态偏差小于0.25 MW,满足机组运行要求。
5 结 论
(1)依据典型亚临界机组负荷-压力简化非线性动态模型推导得到炉侧开环机侧闭环无自平衡对象传递函数。
(2)从简单一阶无自平衡对象入手,逐步分析出机组协调控制系统无自平衡对象炉侧控制器PD调节和PID调节的利弊。
(3)采用模糊神经网络设计新的控制器,利用其自学习能力解决难以人工确定负荷扰动时何时进行积分切换控制的难题,实验表明此方法能够满足机组运行要求。
