多相交错Buck变换器的解耦均流控制方法
2021-02-03胡文浩陈昌松段善旭
胡文浩,陈昌松,段善旭
(华中科技大学电气与电子工程学院,武汉 430074)
DC-DC变换器的交错并联技术广泛应用于并联模块数量固定的场合,以满足大功率、高可靠性的应用要求。然而,由于实际电路元器件的差异,将导致变换器中电流不平衡[1],从而降低了系统性能。因此,需采用合适的均流控制方法以实现电流均衡[2-6]。已有文献对交错并联技术的均流控制策略进行了研究,大致可将均流控制方法分为串行控制和并行控制[7]两种。
文献[8-9]将电压外环和电流内环组成串行控制环,电压外环的输出作为电流内环的参考,则这两个环路必然存在耦合关系,这种耦合关系会复杂电压控制器和电流控制器的设计过程,且控制器之间会相互干扰;文献[10-12]采用并行控制的方法控制输出电压和不平衡电流,其输出占空比取决于电压环输出的均流环输出的总和,这种控制方法十分简单,但是均流环的调节将导致输出电压的波动,控制环路之间仍然是耦合的;文献[7,13]在上述基础上,采用主从均流控制实现了输出电压环和均流环的解耦;文献[14]也采用了一种主从均流控制方法,实现了输出电流环与均流环的解耦。但文献[7,13-14]中的输出控制环的本质是单闭环,难以在中大功率中获得应用。
本文针对交错Buck变换器,在采用以输出电压为外环、以电感电流为内环的双闭环控制器调节输出电压的基础上,提出了一种解耦的平均电流均流控制方法,其双闭环控制器与均流控制器共同决定输出占空比。双闭环控制器用于调节输出电压并改善系统动态性能,而并行的均流控制器用于调节电感电流的平衡。当电路参数一致时,可实现双闭环和均流环的解耦。当电路参数不一致时,分析了实验参数条件下控制环之间的耦合程度。最后通过实验验证了所设计的控制器能有效实现双闭环和均流环的解耦。
1 交错Buck变换器工作原理和平均模型
n相交错Buck变换器的拓扑结构如图1所示,其由n个Buck开关电路并联而成,且各相开关管驱动电路中的三角载波信号依次移相360°/n。图1中,L和rL分别为各相Buck开关电路中的滤波电感和电感电阻;C为变换器的总输出滤波电容;R为输出负载。假设变换器的电感电流连续,则可用开关平均模型代替变换器开关网络,得到图2所示的等效电路[15-16]。
由等效电路模型得到小信号交流模型,可表示为

式中:iLk为第k相电感电流;iz为输出负载扰动;uin和uo分别为输入电压和输出电压。

图1 n相交错Buck变换器拓扑Fig.1 Topology of n-phase interleaved Buck converter

图2 n相交错Buck变换器等效电路Fig.2 Equivalent circuit of n-phase interleaved Buck converter
在本次n相交错Buck变换器的研究中,采用平均电流均流控制方法,故可选择输出电压uo、平均电感电流iLavg及第k相电感电流与平均电感电流之差iLk-iLavg作为控制变量。
假定各相电感和电感电阻均恒定且相等,且电感电流均流,即 Lk=L,rLk=rL,ILk=IL,则可由变换器稳态关系得知开关管的导通占空比Dk也相等,即Dk=D。由式(1)、式(2)可得被控对象的传递函数表达式,即
式中,davg为各开关管导通占空比的均值。
2 解耦的平均电流均流控制策略
2.1 解耦控制策略机理分析
由式(3)和式(4)可知,当变换器的输入电压和输出负载等外界条件不发生变化时,即时,输出电压和平均电感电流Lavg只与占空比扰动均值avg相关。若在电感电流均流控制器平衡电感电流时,使得avg恒为0,便可使均流环不影响输出电压和平均电感电流。
2.2 提出的解耦均流控制策略

为了使变换器的电感电流特性保持一致,选取参数相等的均流控制器。Gu(s)、Gi(s)和 G1(s)分别为输出电压环、平均电流环和均流环的PI控制器。由图3可得

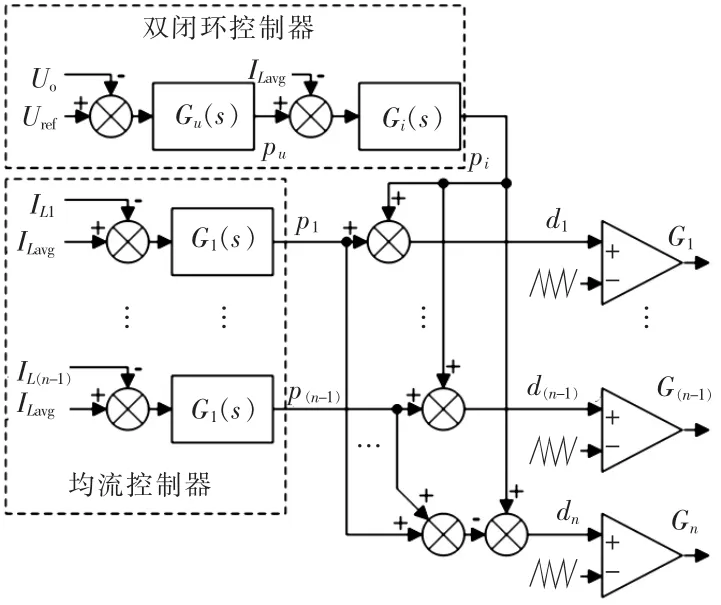
图3 解耦的平均电流均流控制方法Fig.3 Decoupled average current balancing control method
将式(6)、式(7)代入式(3)~式(5),可得双闭环控制器输出信号之间的传递函数为

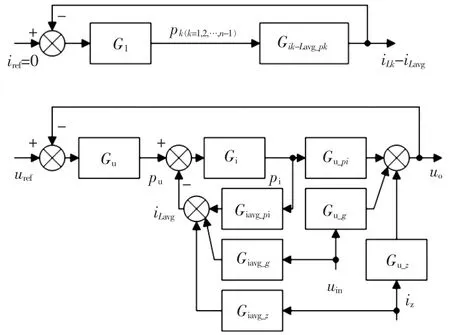
图4 双闭环和均流环的控制方框图Fig.4 Control block diagram of dual closed-loop and current balancing loop
综上所述,所设计的控制器能实现双闭环和均流环之间的解耦合,控制方框图如图4所示。
3 双闭环和均流环的耦合效应分析
3.1 电路参数不一致时的耦合效应
由第2节的分析可知,在假定各相电路参数一致(Lk=L,rLk=rL)时,如图3所示的平均电流均流控制方法可以实现双闭环和均流环之间的解耦。但在实际情况下,各个电感器之间的参数并不完全一样,这将会导致本应解耦的控制环之间存在较小的耦合效应。以两相交错Buck变换器为例,分析在如图3所示的均流控制方法下由参数不一致所导致的耦合效应。
令 L1=L+ΔL、L2=L-ΔL、rL1=rL+ΔrL、rL2=rL-ΔrL。着重考虑双闭环和均流环之间的耦合效应,为了简化分析,可将外部扰动量置0。传递函数不等于 0,故双闭环和均流环有一定的耦合效应。则两相交错Buck变换器控制方框图如图5所示。
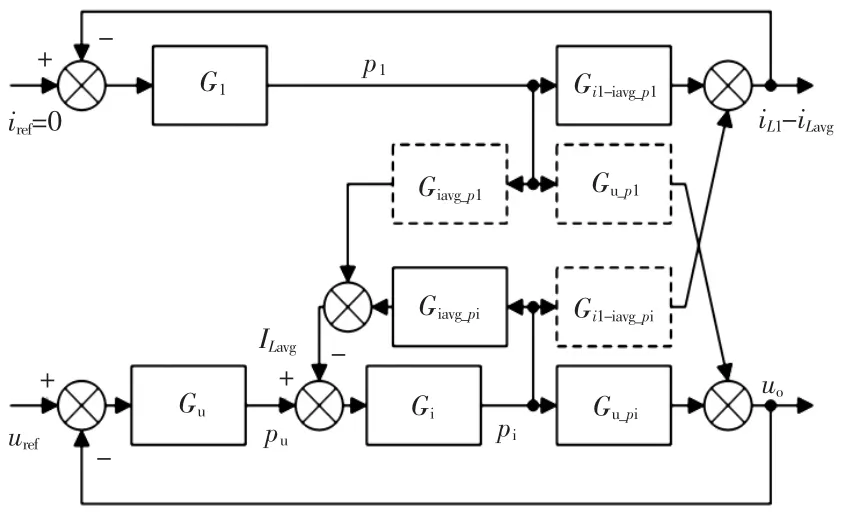
图5 两相交错Buck变换器控制方框图Fig.5 Control block diagram of two-phase interleaved Buck converter
由式(1)、式(2)、式(6)和式(7)可得考虑耦合效应时,各传递函数的表达式分别为


3.2 耦合效应的数值计算
两相交错Buck变换器控制方框图如图5所示。在推导均流控制器输出p1到控制变量iL1-iLavg的环路增益时,ref可被认为是扰动量,并将其置0。则在考虑 Gi1-iavg_pi、Gu_p1和 Giavg_p1的耦合效应时,p1到iL1-iLavg的环路增益为
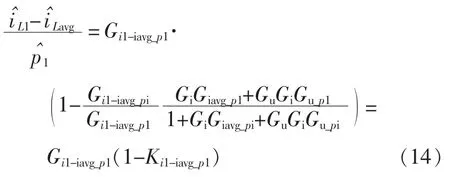
式中,Gi1-iavg_p1为忽略耦合效应时p1到iL1-iLavg的环路增益。故可定义式(14)中Ki1-iavg_p1为均流环的耦合系数。其值越接近于0,说明均流环受双闭环影响的耦合效应越弱。
同理,将Iref置0,可推导电压控制器输出pu到uo控制变量的环路增益为
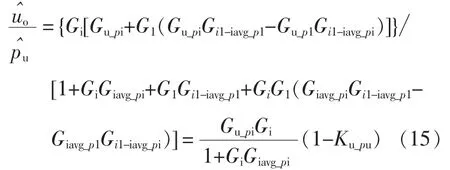
式中,Gu_piGi/(1+GiGiavg_pi)为忽略耦合效应时pu到uo的环路增益;Ku_pu为双闭环的耦合系数,其值越接近于0,说明双闭环受均流环影响的耦合效应越弱。
由式(14)、式(15)可见,耦合系数 Ki1-iavg_p1、Ku_pu与PI控制器Gu、Gi和G1的参数选取相关。在实验参数条件下,耦合系数的幅频响应曲线如图6所示。图6(a)中,在不同频率下,耦合系数Ki1-iavg_p1的最大幅频响应为-72 dB,即 2.5×10-4≪1,则可认为 p1对iL1-iLavg的控制性能受双闭环的影响可以忽略不计;如图6(b)所示,耦合系数Ku_pu的最大幅频响应值为-80 dB,即 1.0×10-4≪1,则可认为 pu对 uo的控制性能受均流环的影响可以忽略不计。因此,可认为在电路参数存在较小差异时,均流环和双闭环之间的耦合效应可忽略不计。
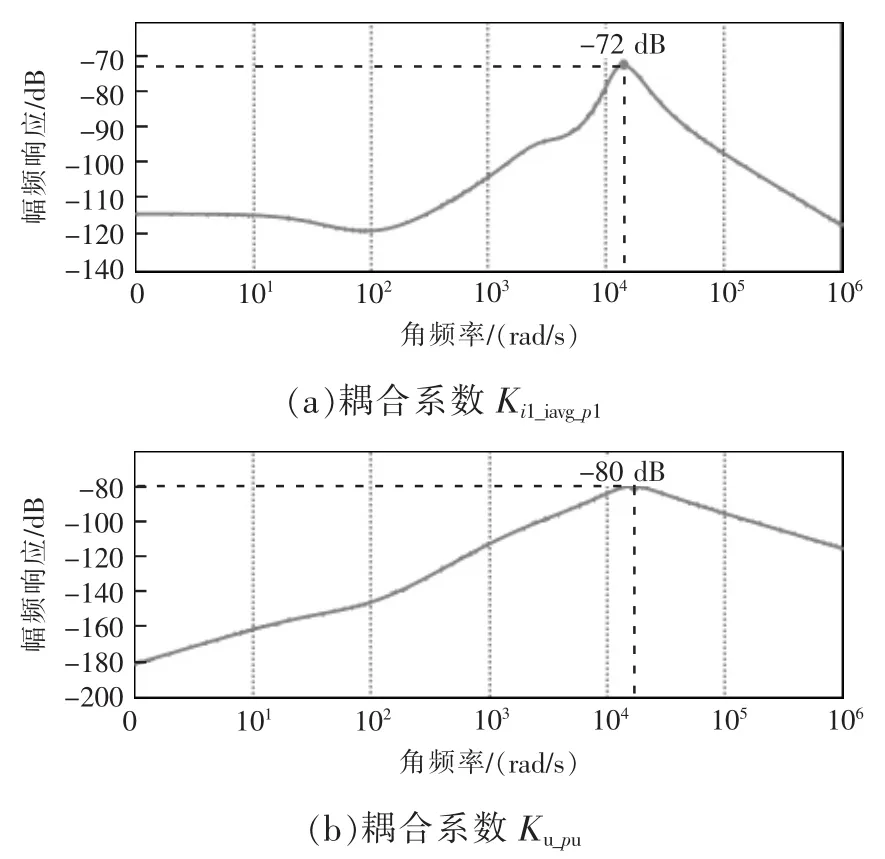
图6 实验条件下耦合系数的幅频响应曲线Fig.6 Magnitude-frequency response curve of coupling coefficient under experimental conditions
4 实验验证
为验证所提均流控制方法的正确性,搭建了两相交错Buck变换器实验样机,如图7所示。表1中为电路参数实际取值。根据控制器设计规则,电流内环带宽设计为2.8 kHz;电压外环带宽设计为420 Hz;均流环带宽设计为2.2 kHz。本文所提解耦均流控制方法的实验验证包括:均流环使能实验、负载突变实验和输出指令突变实验3部分,并将本文所提控制方法与不解耦均流控制方法[10]及输出电压单闭环控制方法[7]进行了实验对比。
均流环使能时的暂态实验波形如图8所示。图8(a)给出了采用不解耦的均流控制方法[10]时均流环使能前后的实验波形。其中iL1和iL2为电感电流,IL1和IL2为滤除开关纹波后的电感电流均值,uo为输出电压。在均流环使能之前,电感电流iL1和iL2不均等,而在均流环使能之后,两路电感电流iL1和iL2虽能较快实现均流,但在此过程中,输出电压uo存在明显波动,Δuo≈14 V,说明均流控制器影响了输出电压,即均流环和输出电压环是耦合的。
图8(b)给出了采用本文所提控制方法时均流环使能前后的实验波形。在均流环使能之后,两路电感电流能较快均流。且在此过程中,输出电压uo几乎保持恒定,Δuo<1 V。说明均流控制器对输出电压几乎无影响。
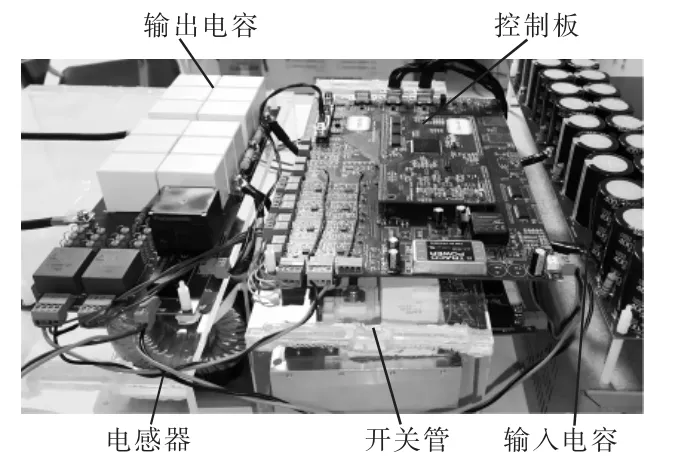
图7 两相交错Buck变换器实验样机Fig.7 Experimental prototype of two-phase interleaved Buck converter

表1 两相交错Buck变换器实验参数Tab.1 Experimental parameters of two-phase interleaved Buck converter
输出负载突变时的暂态实验波形如图9所示。图9(a)给出了仅用输出电压uo单闭环控制方法[7]时输出负载突变前后的实验波形。当输出负载从11.4 Ω减小至10 Ω时,输出电压uo能在3 ms内跟踪输出电压指令。但在此动态过程中,电感电流的超调量约为60%。故采用单闭环控制器的动态响应性能较差,难以在中大功率场合中获得应用。
图9(b)给出了采用本文所提控制方法时输出负载突变前后的实验波形。当输出负载从11.4 Ω减小至10 Ω时,输出电压uo也能在3 ms内跟踪输出电压指令。在此动态过程中,两路电感电流无超调,且能保持较好的平衡性能。说明双闭环控制器具有优良的动态响应性能,且对电感电流的平衡性能无影响。

图8 均流环使能时的暂态实验波形Fig.8 Experimental transient waveforms when current balancing loop is enabled
图10为采用本文所提控制方法时输出电压uo指令突变前后的实验波形。将输出电压指令从180 V增加至190 V时,输出电压uo能在3 ms内跟踪输出电压指令的变化。且在此动态过程中,两路电感电流保持较好的平衡性能,说明双闭环控制器对电感电流的平衡性能无影响。
由实验的暂态波形图8~图10可知,本文所提均流控制方法实现了均流环与双闭环之间的解耦。此外,双闭环控制器可使变换器具有优良的动态响应性能。
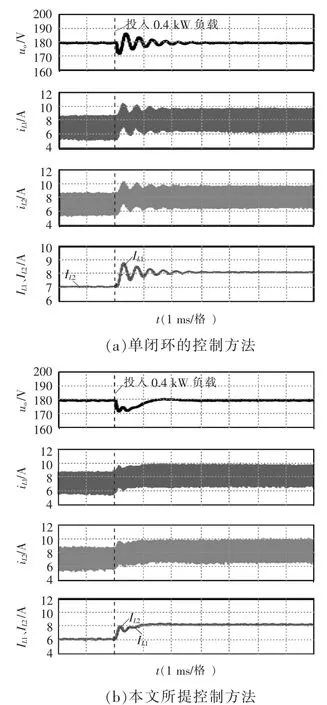
图9 输出负载突变时的暂态实验波形Fig.9 Experimental transient waveforms when output load is changed
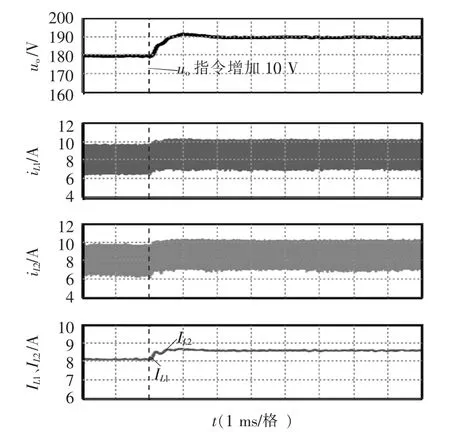
图10 输出电压指令突变时的暂态实验波形Fig.10 Experimental transient waveforms when output voltage command is changed
5 结语
本文就交错Buck变换器拓扑提出了一种解耦的平均电流均流控制方法,解决了控制过程中双闭环与均流环存在的耦合问题,具有控制器设计简单、变换器动态性能优良等优势。数值计算结果表明,即使各相电路参数存在差异,在本文所提控制方法下,双闭环和均流环的耦合程度较小,可忽略不计。最后,搭建了两相交错Buck变换器实验样机,实验数据和实测波形表明,本文所提解耦均流控制策略具有优良的动态响应性能,并可实现双闭环与均流环的独立调控。