基于遗传算法的某火炮高低伺服系统SMC 研究
2021-02-01秦涛鲁冬林郑国杰雷梓园
秦涛,鲁冬林,郑国杰,雷梓园
(1.陆军工程大学,江苏 南京 210001;2.32228 部队,江苏 南京 210012)
战车高低伺服系统是炮控系统的重要组成部分,该系统在炮手操纵台的控制下驱动火炮身管在高低向运动,为了使炮手能够快速而稳定地跟踪目标,提高复杂环境下的射击命中率,对该伺服系统提出了较高的瞄准性能和稳定性能要求。
目前,坦克、战车高低伺服系统主要分为电传动式和电液伺服式,其中,装配电液伺服系统的装备仍广泛列装。在以电液伺服控制的高低伺服系统中,通常采用安装在摇架上的陀螺仪组作为稳定部件,因为颠簸抖动使陀螺仪组输出相应的失调角信号,在炮控箱的控制下输出不同的两支直流电流到控制电磁铁,从而控制阀门张开程度,最终通过动力缸驱动身管朝着失调角归零的方向不断调整,从而实现稳定。射手命中率的高低与火炮伺服稳定性能有着密切的联系。
在火炮高低稳定系统中,存在着不可忽视的非线性环节,影响的主要因素有:火炮耳轴轴承有一定的摩擦力矩,车体经过复杂地形导致的抖振对身管的干扰,以及内部的参数摄动。针对以上问题,文献[1]将自适应模糊滑模控制方法应用到火炮身管定位与平衡中,通过仿真证明了有效克服外界干扰,降低了固有抖振。文献[2]通过积分分离PID 控制策略,并采用幂次项对指数控制律改进抖振因素,改善了系统性能指标。文献[8]针对机械臂时变非线性特征,采用遗传算法解决了常规滑模控制收敛慢的问题。
在对以上文献研究的基础上,本文以某突击车高低伺服系统为研究对象,在建模的基础上,利用GA 算法来寻找优化滑模控制器的参数,并以Matlab/Simulink 数值仿真进行验证。仿真实验表明,该设计可以有效提高该战车火炮高低伺服系统的稳定性能。
1 系统的组成及模型建立
1.1 系统组成及原理简介
火炮高低伺服系统主要由液压放大器、动力缸、火炮身管等组成。其简化后的结构框图如图1 所示。
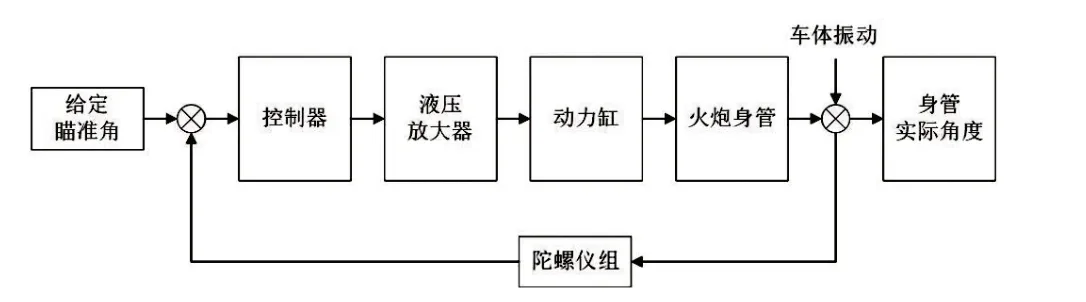
图1 某火炮高低伺服系统稳定控制框图
该战车火炮高低调炮时,主要原理流程如图2 所示。
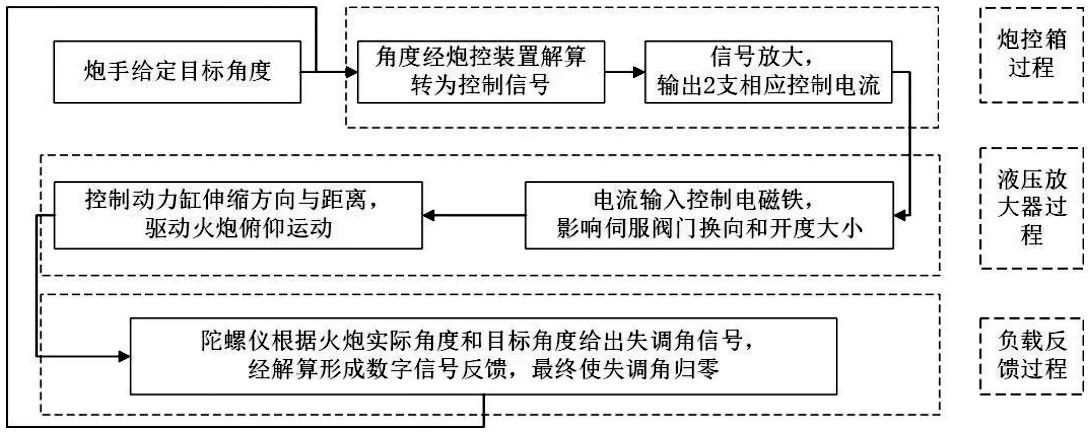
图2 高低调炮原理
1.2 系统模型建立
对模型假设如下:不计油管压力损耗;上下腔活塞缸筒面积一致;控制电磁铁响应性能良好;忽略液压油压缩特性。
建立电液伺服系统的流量方程:

其中:B 为电压放大系统;nb为油泵转速;Uin为输入电压;Lt为总泄露系数;Tb为油泵排量梯度;P1为负载压力;θ 为火炮俯仰角度;α 为有效体积弹性模数;P2为补油压力;K 为动力缸速度与火炮角速度转换系数;A 为动力缸活塞面积;V0为压力为P1的液压油容积。
对身管力矩平衡方程进行Laplace 变换:

其中:J 为转动惯量;G 为负载刚性;B 为黏性阻尼系数;TL为不平衡力矩。
D 是动力缸等效排量。
2 SMC 控制器的设计
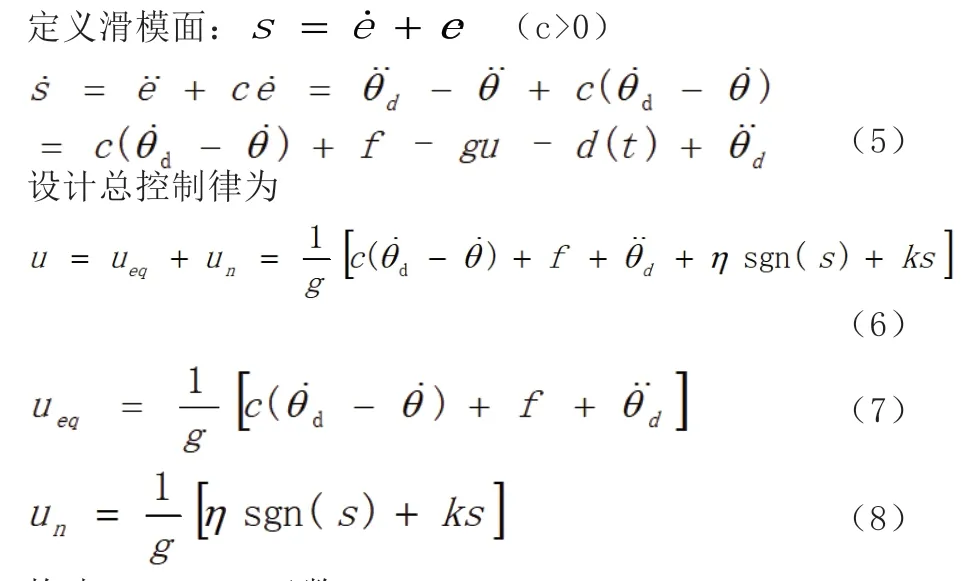
设定角度控制目标为θd,定义系统误差e=θd−θ
构建Lyapunov 函数:
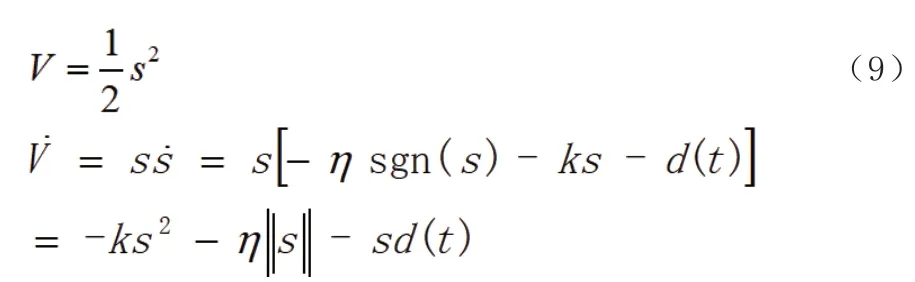
当k>0时,取η≥C,则≤0,系统能达到渐进稳定。
3 遗传算法优化
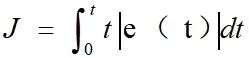
滑模界面参数c、指数趋近律参数k 和η 分别会引起系统的反应速度、趋紧速度和抖振,因此,需综合整定c、k、η 三个参数。GA 算法借鉴自然选择和进化机制对多个搜寻点进行同时并行搜索,运算过程并不复杂,有较好的全局搜索能力,本文利用此法对参数c、k、η 进行优化。为了让系统偏差归零,不妨定义最佳性能指标为:
遗传算法优化参数过程,示意图如图3所示,具体步骤如下:
(1)初始化随机种群;
(2)将种群每个个体依次对c、k、η 进行赋值,运行建立的Simulink 模型,然后得到适应度值;
(3)根据各个个体得到的适应度值,判断是否符合结束条件。若满足,则退出算法,得到最优个体;若不满足,跳至步骤(4);
(4)选择、保优、交叉、变异,产生新种群,转到步骤(2)。
4 建模与联合仿真实验
根据火炮高低伺服稳定控制系统模型和状态空间方程组,建立Simulink 模型如图4 所示。
在Matlab 中,以m 文件形式编辑遗传算法程序,通过S-Function 模块导入Simulink 模型,实现参数c、k、η 的赋值,调用sim 函数运行图示Simulink 系统模型,经过系统运行得到对应参数的性能指标,该性能指标反馈到遗传算法过程,作为适应度值判断程序是否继续进行或者结束。
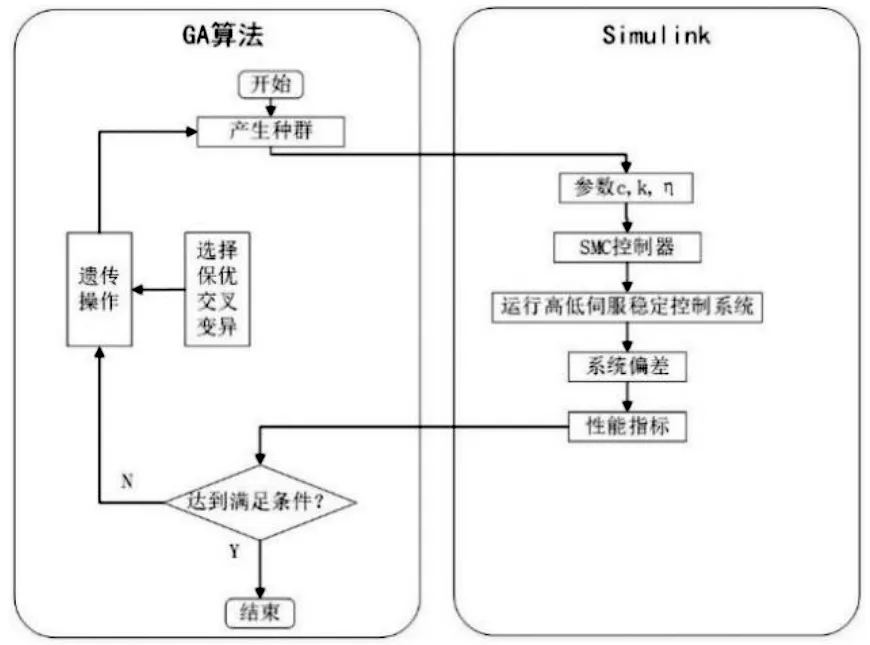
图3 遗传算法优化滑模控制参数示意图
为了凸显采用GA 算法优化参数后火炮高低伺服稳定控制系统的有效性,仿真比较了一般SMC 控制和经过GA 优化参数的滑模控制在火炮伺服稳定控制效果的差别。其中,遗传算法参数设置如表1。
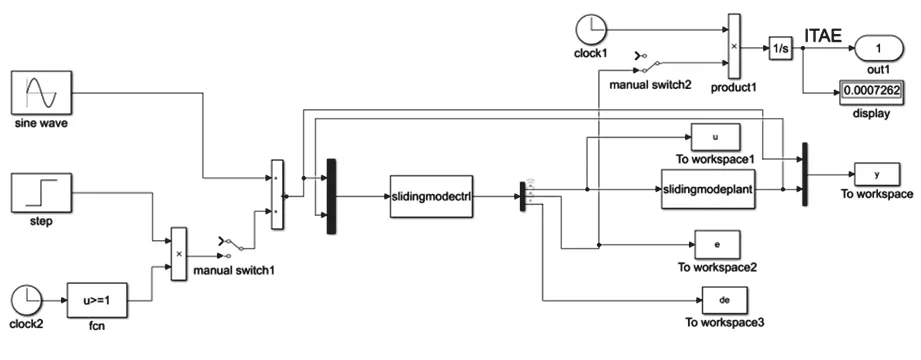
图4 Simulink 环境中的滑模控制系统
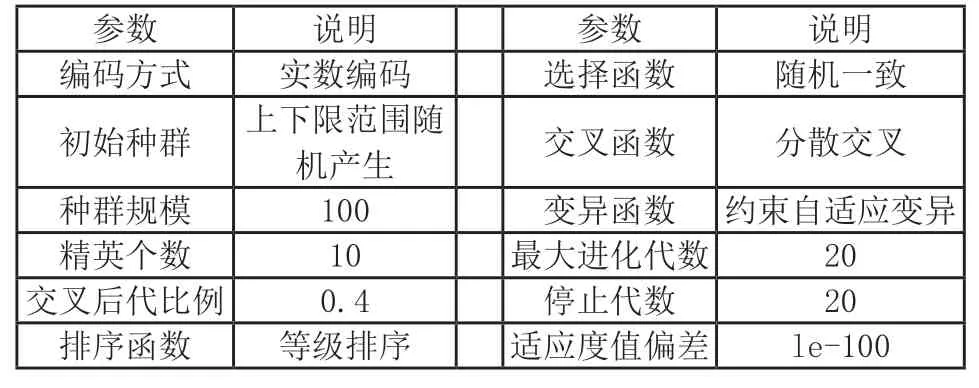
表1 遗传算法参数设置
待优化函数输出值选用图4 输出端子1 的值。在两种控制方法的过程中,在1s 的时候分别加入一个定值为1null的阶跃扰动信号,观察系统角度和角速度偏差信号。仿真时间设定为8s,分析系统的响应特性,得到控制函数曲线和角度、速度偏差信号如图5 ~7 所示。
通过仿真分析的结果可以看出,在1s 加入一个阶跃扰动信号后,本系统通过一般滑模变结构控制方法分别在1.76s 和1.75s 实现了角度和速度信号的跟踪到位,而经过本文方法优化后,本系统在1.38s 和1.42s 完成了角度和速度的跟踪到位,至少提前了0.3s,实现滑模变量的快速收敛,有效提升了系统的鲁棒性,体现了本文方法对火炮高低伺服系统的有效性。
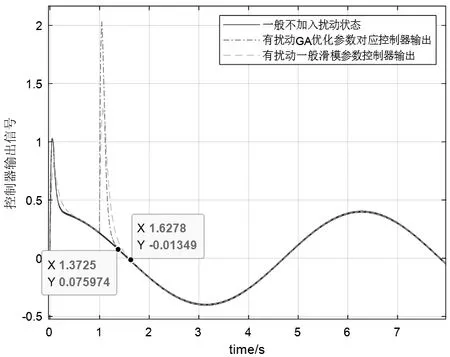
图5 不同状态下的控制器输出函数曲线
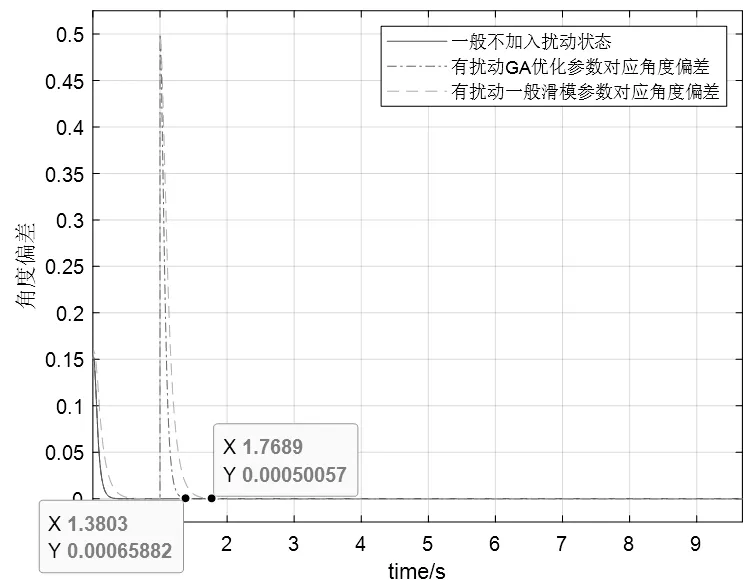
图6 不同状态下的角度偏差曲线
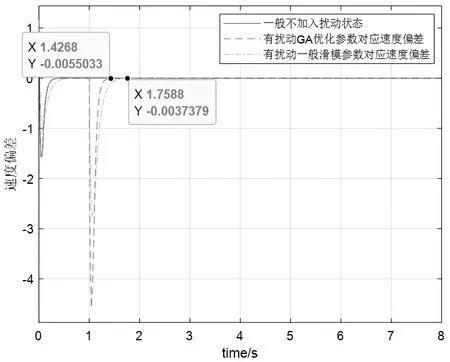
图7 不同状态下的速度偏差曲线
5 结语
针对火炮高低伺服稳定控制系统由于耳轴间隙和黏性摩擦带来的非线性时变特征,提出GA 优化的SMC 方法。通过滑模控制器参数的优化实现系统角、速度的快速跟踪,提高了系统的响应速度,并且具备较好的抗干扰能力。仿真结果也验证了遗传算法优化的滑模控制方法的有效性,能很好地完善火炮高低伺服系统的稳定控制。
