燃料电池小型车SOC动态调节的功率跟随控制策略
2021-02-01陈维荣李锦程
陈维荣 ,李锦程 ,李 奇
(西南交通大学电气工程学院,四川 成都 610031)
近年来,氢能技术凭借绿色环保,高转换效率,功率密度大等优势,迅速在交通运输等领域发展应用[1]. 质子交换膜燃料电池是一种利用氢气与氧气进行电化学反应产生电能的装置,基于质子交换膜燃料电池作为动力来源的混合动力车因具有补充能量迅速,纯绿色零排放,启动温度低等优点,得到广泛关注与研究.
风冷型质子交换膜燃料电池依靠环境中空气进行降温,无需其他降温装置,相对于水冷型燃料电池,具有结构简单,成本较低的优势,通常与锂电池组成混合动力系统,适合应用于巡逻车,观光车等小型车辆等中小功率氢能设备应用中. 传统的混合动力能量管理策略常采用状态机[2]、功率跟随[3]、等效氢耗[4]、模糊控制[5]等方法. 然而近年来,许多基于优化的控制策略被应用于混合动力能量分配中,以获得更好的性能指标. 王哲等[6]提出一种基于Pontryagin极小值原理设计的提高车辆经济性和燃料电池耐久性的能量管理策略. 徐陈锋[7]提出一种基于自适应模糊策略的能量管理方法,在不同工况下调节控制参数,使系统具有较强鲁棒性. 张国瑞等[8]针对燃料电池有轨电车运行特点,提出一种基于运行模式和动态混合度的控制策略,通过RT-LAB进行仿真验证,具有较高的燃料经济性.
本文使用风冷质子交换膜燃料电池与锂电池组成混合动力系统,并逐一介绍构成车辆的混合动力系统、氢气储存供给系统、信号控制系统. 针对目前混合动力系统燃料电池功率变化及SOC (state of charge)波动剧烈问题,提出一种动态调节的功率跟随算法,该算法可对不同工况及初始SOC改变调节系数,达到减小锂电池SOC及燃料电池输出功率波动的效果,通过运行实验对获得数据进行分析,并验证控制算法有效性.
1 燃料电池混合动力车系统结构
该燃料电池混合动力观光车采用燃料电池-锂电池混合动力模式,设计最高运行速度30 km/h,续航里程150 km,最大载客量12人(人均重量70 kg/人),该车于2018年8月25日经过调试测验,可正常运行,车辆实景如图1所示.

图1 燃料电池混合动力车运行实景Fig. 1 Fuel-cell hybrid electric vehicle
该燃料电池混合动力车采用风冷型燃料电池电堆与锂电池组成的混合动力系统提供能量来源,采用5 kW三相异步电机为整车提供动力,整车由混合动力系统、氢气储存供给系统、信号控制系统3部分构成,车辆结构如图2所示.

图2 混合动力车系统结构Fig. 2 Hybrid car system structure
车辆设计参数符合电动观光车相关标准,具体参数如表1所示.

表1 车辆运行参数Tab. 1 Vehicle operating parameters
1.1 混合动力
混合动力系统结构如图3所示,该系统采用3 kW风冷型燃料电池电堆作为主动力源,电堆控制器通过控制电堆散热风扇及进出气电磁阀调节电堆工作温度. 由于电堆输出电压受输出功率影响,通常在燃料电池后级增加一级直流变换器稳定输出电压及控制燃料电池输出功率. 系统配置60 V、200 A·h 锂电池与燃料电池组成混合动力系统,补足燃料电池来不及响应变化功率及吸收制动过程中电机产生的回馈功率. 电机控制器接受由混合动力控制器发出的命令信号并按相应要求将母线60 V直流电压逆变后驱动三相异步电机.
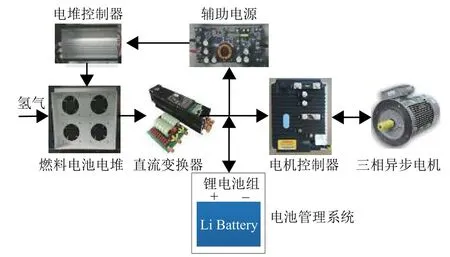
图3 混合动力系统结构Fig. 3 Hybrid system structure
1.2 氢气储存供给
燃料电池电堆中由氢气供给系统输入的氢气及空气中存在的氧气进行电化学反应,产生电能及反应产物水,水以水蒸气或液态水的形式经排气阀排出电堆[9-10]. 氢气储存供给系统见图4,其中采用35.0 MPa氢气储气罐,储气罐容量28 L,储气罐瓶口装有氢气压力表及压力传感器,测量显示剩余氢气压力并传递给混合动力控制器. 氢气罐中的高压氢气经过一级减压阀后气压降至1.0 MPa,由二级减压阀将减压后的氢气压力调节为适宜燃料电池反应的精确稳定的0.5 MPa,最后通过开关手阀送入燃料电池电堆.

图4 氢气储存供给系统结构Fig. 4 Structure of hydrogen storage supply system
1.3 信号控制
信号控制系统采用CAN2.0B总线协议,混合动力控制器作为主机设备,其余控制器作为从机设备.从机设备包括:
电堆控制器——向混合动力控制器反馈燃料电池电堆输出电压电流,温度,故障等信息,并受混合动力控制器控制启停电堆;
直流变换器——接受控制信号并调节燃料电池电堆输出功率;
电机控制器——接受控制信号调节电机扭矩转速等参数,反馈电机所需电压电流;
电池管理系统——向混合动力控制器反馈锂电池SOC及电压电流信息;
显示仪表——接受控制命令并显示当前氢气压力、剩余电量、运行状态等信息.
2 混合动力观光车能量管理策略
混合动力能量管理策略指将多个动力源的能量通过一定的策略进行合理分配,在满足设备稳定安全运行的前提下,达到提高供电系统性能的目标. 主要的性能指标有能源利用效率、设备使用寿命、设备成本、安全性等[11-12]. 本文所述的燃料电池混合动力观光车通过SOC动态调节的实时功率跟随策略,优化车辆在面对不同工况的状态下的燃料电池输出功率曲线及锂电池SOC波动,延长设备寿命[13].
2.1 功率跟随策略及参数分析
传统燃料电池-锂电池混合动力功率跟随策略使燃料电池输出功率与负载需求功率平衡,并通过引入SOC偏离量修正燃料电池输出功率,达到稳定锂电池SOC的作用. 燃料电池输出功率为

式中:Pload为负载需求功率,即电机运转所吸收或回馈的功率;Pbat,chg为标准充电功率,根据锂电池充放电能力及系统整体功率进行设定;fSOC为SOC的偏离系数,如式(2).

式中:CSOCH、CSOCL分别为锂电池SOC的上、下限;CSOC为锂电池当前SOC.
对于一个确定的混合动力系统,其锂电池SOC边界限制一般是恒定的,且当CSOC= 0.5(CSOCH+CSOCL)时, fSOC等于0,定义锂电池SOC参考值为

则fSOC可简化为CSOC的线性函数,可表达为

式中:ks为调节系数.
将式(4)代入式(1),得

式中:Pfc,real为燃料电池实际输出功率,当计算输出功率剧烈变化时,由于燃料电池动态响应能力不足会使实际输出功率与计算输出功率存在偏差;CLi为锂电池容量;ΔCSOC为SOC变化量;t为时间.
由式(5)可知,ks会影响用于平衡SOC的燃料电池输出功率. 在CSOC与CSOCREF偏差较大时,提高ks可以增加燃料电池输出功率与负载需求功率差额,更快将SOC恢复至参考值附近,并提高稳定能力;当负载功率需求小时,Pload在Pfc计算中占比小,Pfc受锂电池SOC影响大,减小ks可以避免当SOC偏离过大时Pfc长期处于低功率无效输出或高负荷输出.
分别截取一段混合动力观光车实际运行工况,并根据表2所示参数设定混合动力系统参数,绘制在不同条件下ks对系统运行性能的影响,如图5和图6所示.

表2 功率跟随参数Tab. 2 Power following parameters

图5 相对剧烈工况下混合动力功率及SOC曲线Fig. 5 Hybrid power and SOC curves under relatively severe working conditions
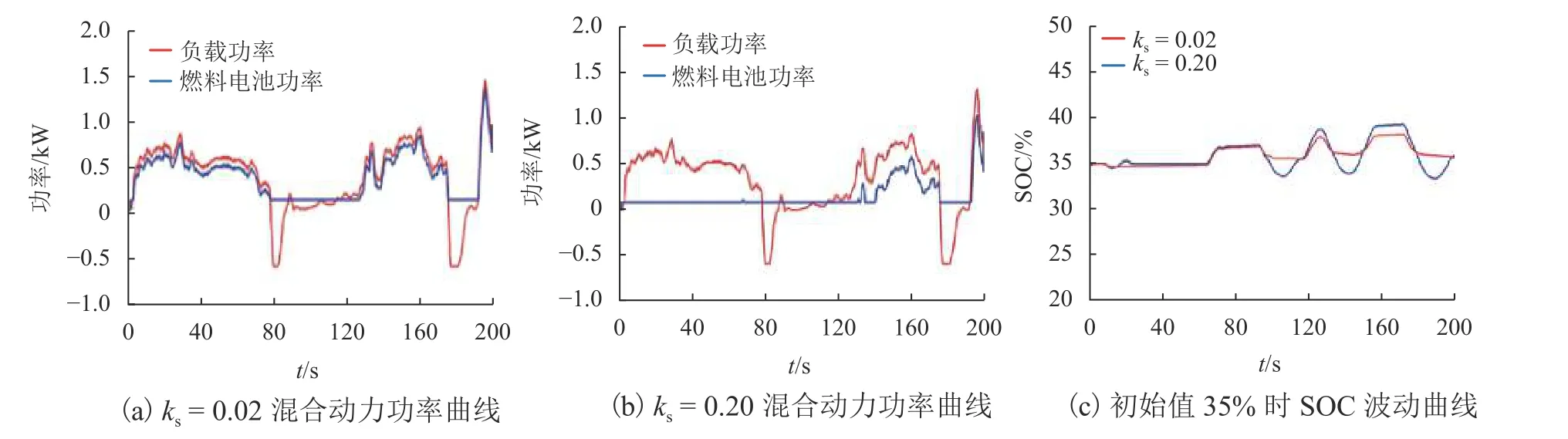
图6 相对平缓工况下混合动力功率及SOC曲线Fig. 6 Hybrid power and SOC curves under relatively flat working conditions
图5 为一段燃料电池混合动力车运行过程中较为剧烈的功率需求曲线. 由图5(a)所示:红色曲线为负载的电机功率,小于0的部分为电机制动时回馈的能量曲线;蓝色曲线为燃料电池输出功率,燃料电池使用氢氧进行电化学反应生成电能,该反应在电堆中无法逆向进行,因此燃料电池无法吸收电机制动回馈的能量,同时燃料电池动态响应能力较差,造成燃料电池输出功率与负载需求功率出现差额,该部分能量差额由锂电池进行提供或吸收.
图5(b)为该工况下,锂电池SOC初始值与SOC参考值相等,均为35%时的SOC波动曲线,当调节参数ks= 0.20时,相比ks= 0.02时SOC波动更小,同时在整个运行周期结束后维持SOC参考值的能力更强.
图5(c)为在该工况下,锂电池初始值高于设定值的SOC变化曲线,锂电池初始值为45%,SOC参考值为35%. 调节参数ks= 0.20时,SOC曲线可以较为快速地向设定值趋近,在ks= 0.02时,无法快速将SOC调节到SOC参考值.
图6表示在需求功率较为平缓的工况下不同调节参数对调节效果的影响. 图6(a)和图(b)为初始SOC=45%时的燃料电池输出功率曲线. 对比图6(a)和图6(b)可知:由于需求功率较为平缓且功率平均值不高,燃料电池输出功率受锂电池SOC偏离影响较大,当调节系数较大时,用于平衡SOC的功率在总功率中占比较大,造成燃料电池在一段时间内无法有效输出功率或高负荷运行,对系统整体效率及燃料电池寿命造成负面影响.
图6(c)表示在初始SOC值为35%时不同调节参数对SOC波动的影响. 由于需求功率平缓,燃料电池动态响应可以满足系统需要,在ks= 0.20或ks= 0.02的情况下均可以实现维持SOC参考值. 其中ks= 0.20时SOC在调节过程中超调部分较高,使整体波动更为明显. 并且过高的调节参数会引起SOC曲线产生振荡.
2.2 基于荷电状态偏差调节的实时功率跟随策略
本文提及的燃料电池混合动力观光车中,将燃料电池电堆输出功率作为控制量,通过调节电堆后级DC/DC变换器输出功率实现各能量供给单元之间的输出功率分配.
车辆在运行过程中,通过传感器采集母线电压、电机需求功率、燃料电池电堆输出功率、锂电池SOC等参数,计算燃料电池期望输出功率,并通过DC/DC控制输出电流值实现整套混合动力系统的控制[14].
图7为基于荷电状态偏差调节的实时功率跟随策略实现流程,图中:Ubat为锂电池电压;Kp、Kd和Kc分别为比例系数、微分系数和惩罚系数. 根据接收功率及SOC信号实时计算ks,将计算所得ks代入式 (5)中计算燃料电池期望输出功率,根据采集母线电压信号转换为DC/DC输出电流信号,传输至电流环PI (proportional integral)控制器计算驱动开关管的 PWM (pulse width modulation)信号.

图7 基于荷电状态偏差调节的实时功率跟随策略Fig. 7 Real-time power following strategy based on SOC deviation adjustment
在观光车运行过程中,由于使用环境在景区等地势较为特殊的环境中,会遇到上坡、起步、加速等功率变换剧烈的工况及平路匀速、下坡制动等功率平缓的工况,通过调节功率跟随算法中的ks可实现在不同工况下对锂电池SOC波动,对燃料电池输出功率进行优化.
通过2.1节中对不同工况下调节效果的比较,发现ks调节效果主要与需求功率大小及需求功率变化剧烈程度有关. 式(6)为ks的计算公式,对负载需求功率与燃料电池电堆输出功率之间的差额功率进行PD (proportional derivative)控制,并引入了受 SOC偏离量控制的分量用于加快恢复SOC参考值.

式中:Perr= Pload- Pfc,为负载需求功率与燃料电池输出功率的差额;CSOCERR= CSOCREF- CSOC,为锂电池当前SOC与SOC参考值的差额.
燃料电池输出效率特性为存在拐点的效率曲线,在满功率或欠功率状态下较低,处于平稳的有效功率输出段效率较高. 适当的ks可使燃料电池避免燃料电池处于欠功率或满功率状况,实现平缓有效功率输出,提高整车运行过程中燃料电池转换效率.
在车辆运行过程中,为提高系统安全性,延长燃料电池电堆寿命[15],需对运行参数进行约束. 式(7)为燃料电池运行约束条件.

式中:Pfc.min为燃料电池最小输出功率,为避免在加速、制动过程中电堆频繁启停设置的保护条件,实际运行中设定为500 W;Pfc.max为燃料电池最大输出功率,由电堆额定功率决定,实际运行中设定为3 000 W;Rfc.max为燃料电池最大输出功率变化率,为避免在剧烈工况下影响电堆寿命设置,实际运行中设定为100 W/s.
锂电池约束条件为[16]

式中:Ibat为锂电池充放电电流;Ibatd.max和Ibatc.max为锂电池最大放电电流及最大充电电流.
对于CSOCH和CSOCL,超过该范围会影响锂电池循环寿命及车辆安全运行,并反映车辆可能出现氢气储气量不足,燃料电池系统故障等问题,混合动力控制器发出SOC报警信息;对于Ibatd.max和Ibatc.max,超过此范围反应燃料电池系统及动力系统参数不匹配,混合动力控制器发出电流报警信息.
ks约束条件为

式中:ks.min为调节系数下限,避免系统失去调节能力;ks.max为调节系数上限,避免调节参数过大引起系统振荡.
2.3 燃料电池电堆运行效率分析
根据理想气体公式,氢气消耗摩尔量与氢气储气瓶压强的关系为

消耗氢气生成水的过程中产生的热量为

电机在运行中的能量消耗为

式中:WM为车辆运行过程中电机系统需要吸收的功;为电机系统平均功率.
混合动力系统中总的能量为

燃料电池供电系统整体发电效率为

式中:ηstack为燃料电池电堆将氢能转换为电能的效率,与发电电堆自身性能有关,目前大多在40%~50%之间;ηDC为直流变换器的转换效率;ηbat为燃料电池发出的部分电能被先充入锂电池组,后又从锂电池组中放出的过程中引起的损耗效率,与锂电池组充放电效率及在工况运行过程中有多少电能经过锂电池组有关.
燃料电池电堆效率可表示为

3 混合动力观光车实际运行状况
混合动力观光车在运行过程中主要关注燃料电池、锂电池、电机负载功率、锂电池SOC、氢气压力状态. 图8为一段400 s内车辆运行状态参数变化曲线,初始SOC等于参考值,在整个过程中SOC曲线小幅波动并能维持在参考值附近. 氢气压力随燃料电池运行消耗氢气缓慢下降.

图8 混合动力观光车运行状态参数曲线Fig. 8 Parameter curve of hybrid electric sightseeing vehicle
燃料电池混合动力观光车车在实际运行过程中多为短途行驶,车辆加减速过程频繁,因此工况在牵引过程中功率冲击较高,在制动过程中需吸收电机回馈能量,整个过程中功率峰值差额大,工况较为复杂.
图9为车辆运行过程的能量分配曲线. 从图中可以看出,燃料电池输出功率平缓,当电机需求功率剧烈上升时,燃料电池输出功率跟随负载功率平缓上升,锂电池输出功率迅速上升补充燃料电池未及时响应的动态功率需求. 当负载需求功率曲线因制动过程能量流动剧烈减少至反向时,燃料电池输出功率平缓下降,锂电池输出功率转为负值,即锂电池吸收电机制动回馈功率及燃料电池输出的功率. 整个过程中燃料电池始终向外输出能量,提供车辆运动的主要能量. 锂电池在加速过程中以短时大功率输出能量,在制动过程中以短时大功率吸收能量,整个过程中作为能量供给的缓冲器,输出与吸收能量基本平衡.
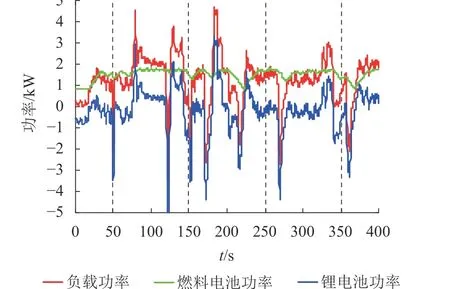
图9 混合动力观光车运行功率曲线Fig. 9 Power curve of hybrid sightseeing car
图10 为长时间运行锂电池SOC曲线. 车辆运行起始SOC为70%,在运行过程中能量管理算法设定参考SOC为35%,当初始SOC高于参考SOC时,混合动力算法中锂电池SOC分量计算结果为负值,使燃料电池平均输出功率小于负载平均需求功率,锂电池整体向外输出能量,SOC下降. 当SOC趋近于参考SOC时,锂电池SOC分量计算结果绝对值较小,燃料电池平均输出功率与负载需求平均功率平衡,锂电池SOC受具体工况影响在参考SOC附近波动.

图10 锂电池SOC曲线Fig. 10 Lithium battery SOC curve
图11 为氢气压力与行驶时间的关系. 在整个循环运行工况下,车辆满载进行实验,平均速度约为18 km/h,运行时间4.5 ks,电机平均运行功率为2.2 kW/s,初始氢气压力28.3 MPa,末态氢气压力21.6 MPa,初始及终止时刻锂电池SOC均为35%.车载储气瓶体积28 L,DC变换器效率为95%,由于锂电池在整个过程中仅补充冲击电流,锂电池充放电效率损耗忽略不计,取环境温度T= 298.15 K,理想气体常数R= 8.314 kPa·L/(mol·K),氢气热值q=2.86 × 105J/mol. 将上述数据代入式(15)中,计算得电堆平均效率为ηstack= 48.15%.

图11 氢气压力曲线Fig. 11 Hydrogen pressure curve
在该循环工况下,可根据速度、行驶时间、氢气消耗量推算在仅依靠氢气提供能量且满载下车辆最大续航里程为94 km,实际使用中,由于氢气瓶中氢气无法完全消耗殆尽,实际续航里程会略小于该值,符合实验测得最大续航里程88 km,整个过程消耗氢气质量660.0 g,平均每公里氢耗为7.5 g.
当设定调节系数为恒定0.50时进行运行测试,按上述方法计算燃料电池效率为46.79%,折算平均每公里氢耗为7.7 g,由于动态调节方法在控制过程中减小对锂电池的反复充放功率,同时使燃料电池工作区间更加稳定在高功率范围,因此效率有所提升,单位距离氢耗有所下降,如表3所示.

表3 不同策略效率及氢耗对比Tab. 3 Comparison of efficiency and hydrogen consumption for different strategies
4 结 论
本文针对燃料电池相关特性,并结合实际工程中可能出现的问题,设计一种燃料电池混合动力车,将车辆划分为燃料电池混合动力系统、氢气储存供给系统及信号控制系统,详细阐述每部分系统的构成及设计思路. 分析在不同工况下功率跟随混合动力策略对于燃料电池输出功率及锂电池SOC波动的影响,提出一种基于荷电状态偏差调节的实时功率跟随策略,并在实际车辆运行中应用. 通过实际实验测试数据验证以上设计结构及算法的可行性,结果表明该燃料电池混合动力车车可在实际工况下保持稳定运行,在提供足够运行功率的前提下,燃料电池功率变化平稳,锂电池SOC稳定,延长燃料电池电堆及锂电池组的工作寿命.
后续研究将考虑加入燃料电池及车辆各系统的在线故障诊断方法,提高整车系统的可靠性.
