用于单电感双输出Buck变换器的PCPV控制方案
2021-02-01徐利梅张留洋杨甲勇
徐利梅 ,王 瑶 ,张留洋 ,杨甲勇
(西南民族大学电气工程学院,四川 成都 610041)
多输出开关DC-DC变换器主要应用于驱动具有不同电源需求的负载. 传统多输出开关DC-DC变换器由多个单输出开关DC-DC变换器并联构成,需要多个电感和开关管. 随着便携式电子产品和LED照明技术的快速发展,其对供电电源的体积和成本要求越来越高[1-2]. 单电感多输出(single-inductor multiple-output,SIMO) DC-DC变换器通过一个电感实现多路输出,减小了电源体积、节约了制作成本[3-4],为多路电源需求的负载提供了一个较好的解决方案. 然而,SIMO DC-DC变换器多个输出支路共用一个电感[5-7],一条输出支路负载变化时会引起电感电流发生变化,从而引起其它支路的输出发生变化,产生交叉影响[8]. 近年来,许多文献围绕SIMO DC-DC变换器的交叉影响问题进行了研究,提出了有效的解决方案.
文献[9-11]采用的分时复用方法消除了单电感双输出(single-inductor dual-output,SIDO)DC-DC变换器的交叉影响. 但该方法仅对工作于断续导通模式(discontinue conduction mode,DCM)和伪连续导电模式(pseudo-continue conduction mode,PCCM)的SIDO DC-DC变换器有效. 由于SIDO DCM DC-DC变换器电流、电压纹波较大和SIDO PCCM DC-DC变换器效率较低等问题,在交叉影响能够得到有效抑制的前提下,通常选用工作于连续导电模式(continue conduction mode,CCM)的SIDO DC-DC变换器.
文献[12-15]采用解耦控制方法减小了SIDO CCM DC-DC变换器的交叉影响. 文献[12]对控制-输出传递函数进行解耦控制,减小了交叉影响;文献[13]通过交叉引入输出状态变量的导数,直接对变换器的交叉影响传递函数进行解耦控制,大大减小了交叉影响;基于文献[13],文献[14]通过交叉引入输出电流对交叉影响传递函数进行补偿,进一步减小了交叉影响;文献[15]提出基于H∞理论的多变量控制方法来实现交叉影响传递函数的解耦控制,从而在理论上消除了交叉影响. 解耦控制方法对交叉影响的抑制十分有效,但计算复杂,且实际实现时较为困难.
第三类能够有效抑制交叉影响的方法为纹波控制方法[16-18]. 文献[16]中,基于电流纹波的共模-差模控制方法具有快速的负载瞬态响应速度,从而减小了交叉影响;文献[17]采用峰值电流控制(peak current mode,PCM)方法,同样通过提高变换器负载瞬态响应速度的方法来减小交叉影响;在此基础上,文献[18]提出了电容电流控制方法,对SIDO CCM Buck变换器的输出交叉影响起到了很好的抑制效果. 相比解耦控制方法,纹波控制方法不但能有效地减小交叉影响,且控制电路简单易实现.
传统PCM控制SIDO Buck变换器的控制电路由两个峰值电流控制电路构成,峰值电流控制电路采样电感电流作为反馈量. 相比电感电流,电容电压(输出电压)能更快地反映负载变化,从而减小交叉影响. 因此,本文在PCM控制SIDO Buck变换器的基础上,引入输出电压纹波至控制电路,提出了峰值电流-峰值电压(peak-current and peak-voltage,PCPV)控制SIDO Buck变换器. 首先,分析了其电路结构、工作原理以及输出电压与输入电压的增益表达式;其次,建立了其状态空间平均模型和小信号模型,通过bode图对比分析了PCPV控制SIDO Buck变换器与PCM控制SIDO Buck变换器的输出交叉影响;最后建立了PCPV控制SIDO Buck变换器的实验电路,实验结果验证理论分析的正确性.
1 PCPV控制SIDO Buck变换器
1.1 电路结构
图1所示为PCPV控制SIDO Buck变换器的原理图,其中,图1(a)为SIDO Buck变换器原理,图 1(b)为 PCPV 控制电路原理. 如图 1(a)所示,SIDO Buck变换器由输入电压源vi、开关管S1和S2、电感L、二极管D1和D2、电容C1和C2、及电阻负载R1和R2组成. vi通过L储存和释放能量,得到两路输出电压v1、v2和输出电流i1、i2. 为减少开关管的数量,实现 D2与 S1互补导通,要求 v1< v2,并定义 v1、v2的输出支路分别为输出支路1和输出支路2. 如图1(b)所示,PCPV控制电路包括峰值电流控制电路和峰值电压控制电路,由运算放大器AM1和AM2、PI (proportional integral) 调节器 PI1和 PI2、比较器CM1和 CM2、RS 触发器 RS1和 RS2、采样电阻 rs及时钟信号clk构成.

图1 PCPV控制SIDO Buck变换器原理Fig. 1 Schematic diagram of PCPV-controlled SIDO Buck converter
峰值电流控制电路由电压控制外环和电流控制内环组成,峰值电压控制电路由电压控制外环和电压控制内环组成. 在峰值电压控制电路中,电压控制外环采样v1与基准电压Vref1作差,得到误差电压ve1,ve1通过PI1得到放大的误差电压vm1作为电压控制内环的参考电压;同时,电压控制内环采样v1,v1与vm1通过CM1比较,比较结果作为RS1的R端的输入信号,clk作为RS1的S端的输入信号,RS1的Q端输出控制信号vg1控制S1. 在峰值电流控制电路中,电压控制外环采样v2与基准电压Vref2作差,得到误差电压ve2,ve2通过PI2得到放大的误差电压vm2作为电流控制内环的参考电流;电流控制内环通过rs得到采样,rsiL与vm2通过CM2比较,比较结果和时钟信号clk分别作为RS2的R端和S端的输入信号,RS2的Q端输出控制信号vg2控制S2.需要说明的是,本文仅对输出支路1的控制电路引入了电容电压(输出电压)纹波,因此仅能减小输出支路2对输出支路1的交叉影响.
1.2 工作原理
图2所示为PCPV控制SIDO Buck变换器工作于CCM的控制时序图,结合图1所示电路原理,PCPV控制SIDO Buck变换器的工作原理描述如下:
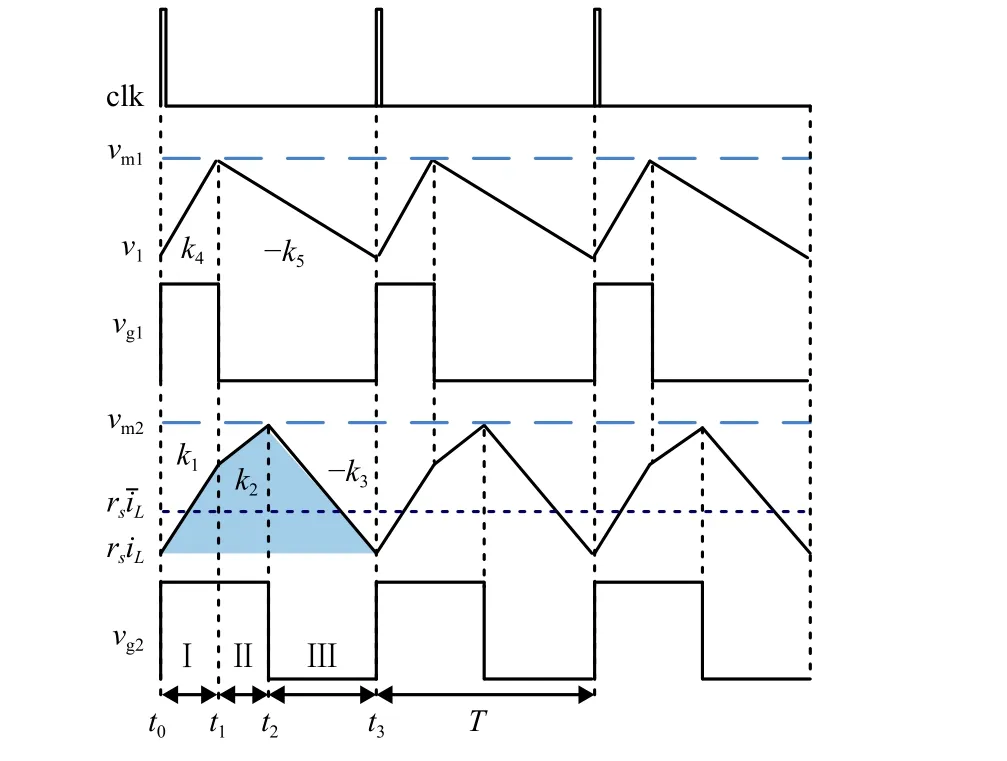
图2 PCPV控制SIDO Buck变换器控制时序Fig. 2 Control timing of PCPV-controlled SIDO Buck converter
在开关周期的起始时刻,clk使S1和S2导通,则D1和D2关断;vi为L充电,rsiL以斜率k1线性上升;同时vi为R1供电,v1以斜率k4线性上升;C2为R2供电.
当v1上升至vm1,S1关断,D2导通,S2保持导通,D1保持关断;vi继续为L充电,且为R2供电,rsiL以斜率k2继续线性上升;C1为R1供电,v1以斜率 -k5线性下降.
当rsiL上升至vm2,S2关断,D1导通,S1保持关断,D2保持导通;L为R2和C2供电,rsiL以斜率-k3线性下降;C1继续为R1供电,v1以 -k5继续线性下降,直至下一个时钟周期到来.
k1~k5、vm1和vm2的表达式分别如下:

式中:kp1和kp2分别PI1和PI2的比例系数;ki1和ki2分别为PI1和PI2的积分系数.
通过上述分析可知,在图2控制时序下,一个开关周期T内,PCPV控制SIDO Buck变换器存在3种工作模态:开关周期起始时刻至v1上升至vm1时,即[0,d1T]工作区间为工作模态Ⅰ;工作模态Ⅰ结束时刻至 rsiL上升至 vm2时,即[d1T,(d2-d1)T]工作区间为工作模态Ⅱ;工作模态Ⅱ结束时刻至rsiL下降至开关周期结束时刻时,即[(d2-d1)T,(1-d2)T]工作区间为工作模态Ⅲ. 图2中,为rsiL的纹波波形中阴影部分的平均值.
1.3 电压增益
令L两端电压为vL,其在工作模态Ⅰ~Ⅲ的表达式分别为vi-v1、vi-v2和 -v2. 由电感伏秒平衡原理可知:一个稳态开关周期内,vL的平均值等于0. 由此可得

式中:d1、d2分别为 S1、S2的占空比.
令流过C1的电流为,其在工作模态Ⅰ~Ⅲ的表达式分别为 iL-i1、-i1和-i1,其中输出电流 i1=v1/R1. 由电容安秒平衡原理可知:一个稳态开关周期内,ic1的平均值等于0. 由此可得

对于SIDO Buck变换器,在一个稳态周期内,电感电流平均值等于输出电流平均值,即

联立式(5)~(7)可得PCPV控制SIDO Buck变换器v1、v2与vi的增益表达式分别为

根据式(8)、(9)和已知电路参数,可确定 d1和d2的大小.
2 小信号建模与分析
PCPV控制SIDO Buck变换器由SIDO Buck变换器和PCPV控制两部分组成,本节分别对这两部分进行小信号建模,从而得到PCPV控制SIDO Buck变换器的小信号模型. 在此基础上,对变换器的交叉影响进行对比分析.
2.1 SIDO Buck变换器小信号建模
选取 iL、v1和v2为状态变量,令状态变量向量基于1.2节工作原理的描述,得到PCPV控制SIDO Buck变换器的工作模态Ⅰ、工作模态Ⅱ和工作模态Ⅲ的状态方程为

式中:

基于式(10),采用状态空间平均方法,得到SIDO Buck变换器的状态空间平均模型为


式中:s为拉普拉斯变换中的复变量.
2.2 PCPV控制小信号建模
由图2中v1的纹波波形可知


2.3 交叉影响分析
根据式(12)、(14)和(19)得到 PCPV控制SIDO Buck变换器的小信号模型如图3所示,进而对PCPV控制SIDO Buck变换器的输出交叉影响进行分析.
记PCPV控制SIDO Buck变换器输出支路1对输出支路2的交叉影响传递函数为输出支路2对输出支路1的交叉影响传递函数为基于图3所示小信号模型,采用表1所示电路参数,得到交叉影响传递函数z12(s)和z21(s)的 bode图分别如图 4(a)和 4(b)所示.

图3 PCPV控制SIDO Buck变换器小信号模型Fig. 3 Small signal model of PCPV-controlled SIDO Buck converter

表1 PCPV控制SIDO Buck converter电路参数Tab. 1 Circuit parameters of PCPV-controlled SIDO Buck converter
图4中,黑色虚线代表PCM控制SIDO Buck变换器的交叉影响传递函数的幅频曲线与相频曲线,蓝色实线代表PCPV控制SIDO Buck变换器的交叉影响传递函数的幅频曲线与相频曲线. 从图4(a)中看出,与PCM控制SIDO Buck变换器相比,PCPV控制SIDO Buck变换器的交叉影响传递函数z12(s)的幅频曲线的低频增益大小相近,说明两种变换器的输出支路1对输出支路2的交叉影响大小差异不大. 从图 4(b)中看出,PCPV控制 SIDO Buck变换器的交叉影响传递函数z21(s)的幅频曲线的低频增益更小,说明PCM控制SIDO Buck变换器输出支路2对输出支路1的交叉影响大于本文提出的PCPV控制SIDO Buck变换器,即输出支路2中的负载电流跳变时,PCM控制SIDO Buck变换器相比于PCPV控制SIDO Buck变换器会在输出支路1的输出电压中引起更大的幅值响应. 由此说明:相比PCM控制SIDO Buck变换器,PCPV控制SIDO Buck变换器减小了输出支路2对输出支路1的交叉影响.

图4 PCM和PCPV控制SIDO Buck变换器的交叉影响传递函数bode图Fig. 4 Bode diagram of cross regulation transfer function of PCM and PCPV-controlled SIDO Buck converter
3 实验验证
为验证理论分析的正确性,搭建了PCPV控制SIDO Buck变换器的实验电路,实验参数同表1.PCPV控制SIDO Buck变换器的实验电路如图5所示,得到的验证原理和交叉影响的稳态实验波形和瞬态实验波形如图6和图7所示.
3.1 稳态实验波形
图6所示为PCPV控制SIDO Buck变换器工作于稳态时的主要实验波形. 其中,图6(a)为iL、d1和d2的实验波形;图 6(b)为vi、v1和v2的实验波形. 从图6可知:vg1大于vg2,一个开关周期内,iL先上升两次再下降一次;且vi为10 V时,v1和v2分别为3.3 V和5.0 V. 实验结果与工作原理相符,且验证了控制方法的可行性.

图5 PCPV控制SIDO Buck变换器实验电路Fig. 5 Experimental prototype of PCPV-controlled SIDO Buck converter

图6 PCPV控制SIDO Buck变换器稳态实验波形Fig. 6 Steady-state experimental waveforms of PCPV-controlled SIDO buck converter
3.2 瞬态实验波形
图7 所示为负载变化时,PCM控制和PCPV控制SIDO Buck变换器的瞬态实验波形. 其中,图7(a)和图7(b)分别为PCM控制和PCPV控制SIDO Buck变换器的输出支路1负载变化时,i1、v1和v2的瞬态实验波形. 图 7(c)和图 7(d)分别为 PCM 控制和PCPV控制SIDO Buck变换器的输出支路2负载变化时,输出电流i2、v1和v2的瞬态实验波形.

图7 PCM控制和PCPV控制SIDO Buck变换器的瞬态实验波形Fig. 7 Transient experimental waveforms of PCM-controlled and PCPV-controlled SIDO buck converter
由图 7(a)和图 7(b)可知,i1从 1.0 A 突变至1.5 A时,PCM控制SIDO Buck变换器的v1经过约12.5 ms的调整时间进入了新的稳态;PCPV控制SIDO Buck变换器的v1经过几个开关周期的调整时间便进入了新的稳态,提高了变换器的瞬态性能.PCM控制和PCPV控制SIDO Buck变换器的v2在瞬态调整过程中,最大电压变化量均约600 mV,即输出支路1对输出支路2的交叉影响均约600 mV,说明PCPV控制与PCM控制SIDO Buck变换器输出支路1对输出支路2的交叉影响大小差不多.
从图7(c)可以看出,i2从2.0 A突变至2.5 A时,PCM控制SIDO Buck变换器的v2经过约12.5 ms的调整时间进入了新的稳态;输出支路2对输出支路1的交叉影响为300 mV. 从图7(d)可以看出,在与图7(c)相同负载变化情况下,PCPV控制SIDO Buck变换器的v2经过约10.0 ms的调整时间进入了新的稳态;输出支路2对输出支路1几乎无交叉影响. 由此说明:相比于传统PCM控制SIDO Buck变换器,本文所提出的PCPV控制SIDO Buck变换器极大地改善了输出支路2对输出支路1的交叉影响,且提高了变换器的瞬态性能. 实验结果与理论分析结果相符.
4 结 论
本文提出了PCPV控制SIDO Buck变换器,以减小输出支路间的交叉影响. 首先,介绍了其电路结构和工作原理;采用电感伏秒平衡和电容安秒平衡原理,推导了输出电压与输入电压的增益表达式. 然后,基于状态空间平均方法,建立了PCPV控制SIDO Buck变换器的状态空间平均模型和小信号模型. 最后,通过bode图分析和实验验证,与传统PCM控制SIDO Buck变换器对比分析了交叉影响的大小,得到以下结论:
1) 输出电流i1变化时,PCPV控制SIDO Buck变换器与PCM控制SIDO Buck变换器的输出支路1对输出支路2的交叉影响差异小;
2) 输出电流i2变化时,相比于PCM控制SIDO Buck变换器,PCPV控制SIDO Buck变换器有效地减小了输出支路2对输出支路1的交叉影响;
3) PCPV控制SIDO Buck变换器的负载瞬态性能更好.
