航天应用载荷的高精度时间同步与共用信息分发*
2021-02-01邱爱华乔旷怡陈寅元
邱爱华,乔旷怡,陈寅元,张 涛
(中国科学院空间应用工程与技术中心,中国科学院太空应用重点实验室,北京 100094)
当前卫星或航天器中应用载荷的时间校准最直接的方式,是通过载荷设备接收飞行器主设备(例如全球导航卫星系统(Global Navigation Satellite System,GNSS)接收机)的时间码数据和秒脉冲信号对齐来解决[1],GNSS接收机可提供定位信息(含协调世界时(Universal Time Coordinated,UTC)),各载荷通过在轨解算时间和获取准确位置来开展高精度的实验任务。这种方法中,当航天器中载荷数量较多、布局广、滚动更换时,单个GNSS设备可能无法提供更多的硬件接口支持载荷连接,尤其是大型航天器的电缆设计将非常复杂,急需寻找一种不过度依赖航天器平台GNSS设备接口的更适合载荷间使用的高精度时间系统和时间同步方式。
一般情况下,航天器轨道、姿态、位置等公共信息的传输,是平台采用总线广播方式逐级发送给各载荷的。实际运控中,因载荷本地采用的时间系统与轨道数据和姿态数据中的时间系统并不完全是一个体系,各载荷收到后,往往需要进行多次时间系统的变换和计算。加之广播数据到达载荷需经历多级总线转发,会产生较大延迟,载荷终端需要对接收到的数据进行差值推算才能利用。综合上述因素后,直接使用平台轨道和姿态等数据作为实验任务参考数据的实际效果会大大降低。一些对姿态和轨道等数据敏感的载荷为了完成高精度的观测任务,往往需要自身再携带功能较强的GNSS接收机和姿态测量系统,研制成本会很高。因此,需要考虑载荷在公共信息利用中的时间系统匹配和解决成本问题。
1 时间基准技术途径
1.1 时间需求分类
航天应用有效载荷的时间基准[2]是指载荷获取的精确绝对时间,一般采用UTC时间系统,并以此为刻度安排载荷任务,时间基准的精度被定义为载荷时间与UTC之差的统计特征。
各应用载荷与时间基准相关的需求主要分为四类(见表1):
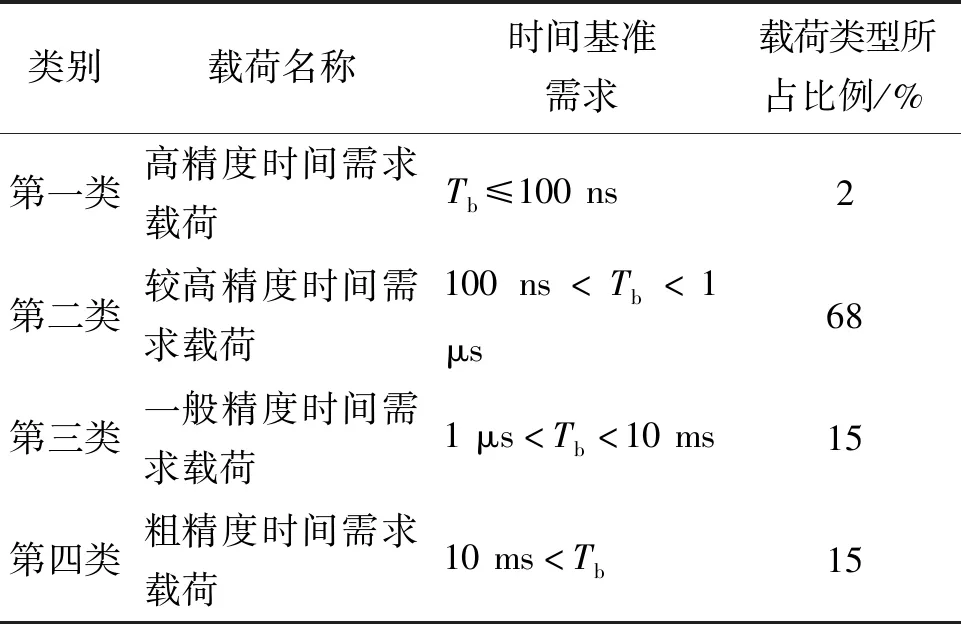
表1 应用载荷时间基准需求分类Tab.1 Payload timing requirements classification
第一类为高精度时间需求载荷,即时间精度需求优于100 ns的载荷,主要为天文载荷或载荷设备与地面具有精确配合试验类的载荷,获取高精度时间以及当前时间下的准确空间位置信息。
第二类为较高精度时间需求载荷,即时间精度需求优于1 μs的载荷,常见的有观测类和天文类载荷,通过获取较高精度时间信息和位置信息,根据轨道、姿态数据和对应的UTC时间,解算对天和对地的位置和观测视场。
第三类为一般精度时间需求载荷,即时间精度需求在毫秒级的载荷,如轨道控制类载荷,主要为获取时间信息和位置信息,用于根据轨道、姿态数据和对应的UTC时间解算相对位置关系。
第四类为粗精度时间需求载荷,即时间精度需求在10 ms量级的载荷,如生命科学类载荷,其任务对时空基准不敏感,通常直接利用航天器平台提供的位置和时间信息就可以完成载荷的任务。
1.2 时间基准解决途径
根据在轨实验任务的需求,应用载荷需要外部实时提供较为准确的时间基准,以及精确的位置、轨道和姿态数据作为载荷观测、测量和位置解算的依据。其中,对载荷任务成败影响较大的主要因素是载荷获取的时间基准精度以及在该时间基准下的当前位置、轨道和姿态数据的实时性能。在载荷实验任务中,为了和定位数据、姿态数据、星下点位置准确关联,就需要这些数据采用统一的时间系统,以便获取准确视场指向,所有的实验任务和测量数据的时间与UTC对齐,便于规划高精度的载荷实验任务。
时间同步是通过对本地时钟的操作,利用处于异地的标准时钟产生的时间对本地时钟进行校准并形成统一时间基准的过程[2]。一般需要在系统中预先设立高精度的标准时钟源,通过软件或硬件设计将系统其他时钟与标准时钟源进行对准和修正。
解决载荷高精度时间基准需求问题的主要技术途径有:
1)将载荷时间基准、时间同步和共用信息的硬软件体系从航天器平台提供的时间、广播信息体系中独立开来。在航天器中单独建立一套为高精度时间和共用信息需求的载荷提供服务的信息系统。
2)寻找更高精度的功能载荷时间源和共用信息。航天器中布置的平台GNSS接收机仅作为辅助手段,开发具备全球定位系统(Global Positioning System,GPS)或北斗导航卫星系统(BeiDou navigation satellite System,BDS)功能的载荷专门提供高精度时间和共用信息的能力。这些功能载荷能提供姿态、轨道、位置等高精度测量信息,数据精度较航天器平台要高,比较符合其他载荷的任务需求。
3)设计新的时间同步机制,解决时钟源硬件设备接口资源瓶颈。在时钟源设备秒脉冲接口资源有限的情况下,可以利用信息组网技术,设计软件时间同步协议,传输介质上采用光纤通道,减少长距离电缆信号传输的损失。
4)在时间同步的基础上,将定位数据、姿态、轨道等共用信息与时间基准进行融合传输,便于载荷解算和高效利用。
我国已经开始在航天器中大规模应用FC-AE-1553总线,作为支持载荷通信的主要通信接口,底层光纤速率采用4.25 Gbit/s[3]。载荷信息网络将采用自主开发的FC-AE-1553交换式网络协议(支持主从式架构),基础协议中并不支持时间同步协议。在FC-AE-1553光纤网络中,利用光纤网络的信号传输优势,首次设计叠加IEEE 1588v2时间同步协议,并采用同步数据发送机制,设计时采用两种时钟输入源进行比较:一种是输入平台秒脉冲和平台共用信息,另一种是输入功能载荷的精确时间基准和共用信息。然后分别同步给有需求的载荷进行精度比较,并给出不同时间精度需求载荷的解决方案。
1.3 利用平台信息的缺陷
1.3.1 平台共用信息与秒脉冲
航天器平台定期只向载荷网络主机发送平台制导、导航与控制系统(Guidance,Navigation and Control system,GNC)测量的姿态信息、GPS数据(含UTC时间码)、数管系统相对时间码等信息。然后由载荷网络主机向各载荷通过网络接口转发。由于数据产生和发送的延迟,以及经过多级总线转发,航天器平台转发这些共用信息到达载荷网络主机的总延迟性能如表2所示,载荷在使用这些信息时,往往需要适当处理后才能使用。

表2 航天器平台向载荷网络主机转发的共同信息Tab.2 Shared information of spacecraft to payload network host
航天器平台通过GNSS单机只提供载荷网络主机秒脉冲接口,脉冲宽度 1±0.2 ms,发送周期1 s±2 μs,下降沿精度≤40 ns。定位数据在对应的秒脉冲信号输出后的1~1.1 s输出,包含绝对定位时间。秒脉冲信号对应的时间与GNSS单机定位数据中的绝对定位时间表示的时间相同。
1.3.2 平台共用信息缺陷
由于相对时间码无法作为载荷实验任务使用,除了用于运控任务之外,实验任务基本不采用平台数管系统的相对时间码。根据平台提供的秒脉冲能力和GPS定位数据的发送时序,平台定位数据到达载荷网络主机的时延范围为1 100~2 700 ms。平台提供的秒脉冲能力和GPS定位数据发送至载荷网络主机后,由载荷网络主机将时间基准和定位数据通过网络同步给各载荷终端。预计各载荷终端的时间基准误差可达几十毫秒,平台定位数据到达载荷终端的总延迟预计则在1 100~2 700 ms范围内(FC-AE-1553光纤传输性能为纳秒量级,可以忽略不计)。
平台共用信息还包括GNC姿态信息和轨道数据等,这些参数信息都是通过航天器平台1553B总线广播给载荷网络主机的。由于数据源是经过从别的平台分系统遥测数据中提取、处理、转发,存在较大的时间延迟,且平台GNC姿态数据包含的时间码与数管分系统时间码的换算差值较大,对直接利用也有较大影响。
通过以上分析,直接利用平台的时间基准和共用信息只能解决一小部分对时间基准要求不高(粗精度)和共用信息要求不精确载荷的间接需求。
1.4 功能载荷时间信息优势
有几类功能载荷在任务期可以专门对外提供精确时间源和位置信息。例如,开展在轨高精度时间与频率系统试验的应用载荷自身就安装有精密定轨装置GNSS设备,可对外提供秒脉冲信号、UTC绝对时间信息和GPS/BD位置信息。另外,该载荷配置有氢原子和微波钟等不同精度的频率源,可供GNSS设备切换不同精度的频率源。
载荷内部GNSS设备的功能定位为提供航天器的精密参考轨道,可为其他应用载荷提供时间源、绝对时间、定位数据、原始观测数据以及轨道预报的信息公共服务。其中:
1)秒脉冲(Pulse Per Second,PPS)秒脉冲精度为30 ns,频率为1 Hz,宽度为1 ms,如图1所示。相较平台的秒脉冲,该载荷的GNSS提供PPS秒脉冲精度和性能较高。

图1 载荷GNSS设备PPS秒脉冲信号Fig.1 PPS second pulse signal of GNSS payload
2)时间码信息为与PPS对应的UTC时间:年月日时分秒。
3)100 MHz频率参考由高精度的原子钟/微波钟提供。
4)直接测量的位置和速度,共6个分量(x,y,x,Vx,Vy,Vz),单位分别为m和m/s,位置精度为10 m。
5)原始观测数据包括伪距、载波、信噪比、多普勒以及观测码相位等信息。
6)轨道预报数据包括:轨道坐标(x,y,x,Vx,Vy,Vz),以及位置预报精度和速度预报的精度等信息。
此外,还利用一些天文载荷的星敏感器数据作为姿态共用信息提供给其他载荷使用,提供载荷布局就近位置处的姿态测量。这些功能载荷一般设置为长期工作载荷,能提供稳定的时钟源和共用信息资源,向其他载荷提供服务。
根据第1.3节分析,理论上对于时间基准性能精度优于10 ms的载荷,采用载荷网络主机转发航天器平台发送的时间码信息和位置信息给载荷,载荷再通过差值解算,已无法得到任务实施所需的位置和姿态轨道数据的精度。如果这些有需求的载荷能直接接入秒脉冲硬件接口,并通过接收的时间码信息与秒脉冲信号进行对齐解算,按道理是可以满足绝大多数载荷的时间基准需求的。但由于航天器有这类需求的载荷数量较多,且布局的位置不集中,大多数载荷安装位置需要开展维修和更换。通过集中设备给有需求的载荷提供秒脉冲硬接口,会增加系统级电缆网设计的复杂度,各载荷均要增加秒脉冲接口和对应数据专用信息接口设计,载荷设备将增加设计复杂度,这个在工程研制中较难实现。由于线损的原因,一些距离远的载荷时间精度也并不一定能满足。
如果将功能载荷当作载荷信息网络FC-AE-1553接口的一个节点,其他有需求的载荷都挂接在FC-AE-1553网络上,则可利用光纤通信的优势,将时钟信息和共用信息通过同步协议,快速提供给有需求的载荷进行解算,可以解决大部分载荷的高精度时间和高精度共用信息需求。
2 高精度时间同步与共用信息分发
2.1 总体方案
2.1.1 接口设计
基于载荷网络主机提供的FC-AE-1553光纤网络,通过叠加时间同步协议的方式,将高精度的时间基准信息通过底层同步协议同步到网络终端,同时将姿态、位置信息等共用数据同步分发给各终端,供各终端进行实时解算,则可大大节省设计复杂度,同时充分利用了光纤网络的传输优势。
GNSS自身输入的时间信号和接收的原始观测数据可来自两个源:其一是接收舱外BD/GPS的天线信号和观测数据后进行本地解算和校准;其二是地面系统会开展天地时频比对,定期对在轨GNSS进行时频校准。通过这两种方式,GNSS输入时间源的随机误差和不确定度,已经事先在GNSS单机本地消除或被校准,然后再输出标准的时间脉冲信息给载荷网络主机,秒脉冲精度稳定在30 ns量级。
在功能载荷GNSS设备上设计网络终端(Network Terminal,NT)节点,将GNSS设备接入FC-AE-1553主干网中,将该NT作为时间基准、定位数据等的信息输入源。由载荷网络主机通过光纤接口接收GNSS设备的时间码信息、直接测量的位置速度以及原始观测数据。GNSS的原始测量数据包括测量时间码、伪距和载波相位,通过NT节点发送给FC-AE-1553网络主机,FC-AE-1553网络主机解算出精确的位置和速度信息、轨道预报数据,同步向各应用载荷发送。各载荷接收到数据后通过在轨实时解算,定位精度可以达到1 m,若事后进行解算,精度可达到厘米量级。另外,一些天文载荷也设计通过NT节点连接至FC-AE-1553的网络主机,提供姿态原始数据源。利用光纤网络同步发送数据的优势,将这些数据通过载荷网络主机同步发送到各网络终端节点,提供给有需求的载荷任务使用。
GNSS、天文载荷与载荷网络主机,以及各载荷用户的信息接口连接关系如图2所示。

图2 GNSS、天文载荷与载荷网络主机的数据流Fig.2 Data flow between GNSS、astronomical payload and network host
2.1.2 时间同步与同步数据发送
由于GNSS定位数据中的时间信息与秒脉冲基本保持同步,与UTC绝对时间相差量级在纳秒量级。载荷网络主机采集GNSS的精确时间后,再将时间信息通过FC-AE-1553光纤同步协议同步至各终端节点。各终端通过时间同步服务,本地绝对时间与UTC时间差的性能可达到理想范围以内。
根据图2,应用载荷的时间基准源来自功能载荷GNSS设备,通过载荷网络主机的精确时间同步机制,向各个载荷网络NT节点实施同步服务。各载荷NT终端节点的时标信息与UTC的差值可达到100 ns~1 μs以内,可以满足绝大部分载荷的高精度时统需求。其中,通过设置时间同步周期,可在100 ns~1 μs之间调整时间同步精度。载荷网络主机接收到GNSS设备的定位数据、观测数据和天文载荷的姿态原始数据后,通过FC-AE-1553底层协议,向应用载荷同步发送这些共用信息,共用信息的时间基准误差仅为纳秒量级。于是各载荷接收到的共用信息(含时间码)与时间基准能按秒对齐进行使用和解算,进而能开展任务所需的对地指向和各种视场的实时确定。
2.2 FC-AE-1553时间同步
2.2.1 网络架构
典型的航天器FC-AE-1553网络如图3所示,FC-AE-1553网络支持交换式和总线式两种拓扑结构的网络形式[4-5]。载荷网络主机作为FC-AE-1553的网络控制器(Network Control,NC),管理交换式FC-AE-1553主干网。主干网上连接各个载荷网络终端。通过NT-NC的桥接设备,可支持总线型FC-AE-1553网络的扩展,总线型网络上连接的NT,通过分时复用通信最终与主干网的NC通信[6-7]。

图3 航天器中典型的FC-AE-1553 网络Fig.3 Typical FC-AE-1553 network in spacecraft
通过在FC-AE-1553网络的底层叠加IEEE 1588v2时间同步协议,可借助光纤传输的优点和FC-AE-1553协议的优势,将网络外部引入的秒脉冲硬接口通过网络传递至各个网络节点,通过维持网络终端节点与网络主节点的时间同步,来达到网络终端节点和外部秒脉冲时间基准对准的目的。
2.2.2 时间同步机制
FC-AE-1553的交换式和总线式两种架构均可实施时间同步服务。航天器采用交换式网络作为载荷信息管理的主干网,可采用总线式网络作为局域网,局域网接受主干网的管理。时间同步算法是在FC-2层之上执行的,FC-2层为标准的Fibre Channel协议,并不受FC-4层是否为交换式和总线式的影响。
(1)交换式网络
交换式网络的时间同步模型如图4所示,以GNSS输入时钟源为例,FC-AE-1553交换式主干网络的时间同步过程如下:

图4 FC-AE-1553主干网络时间同步模型Fig.4 Time synchronization model of FC-AE-1553 backbone network
1)GNSS设备的NT接收GPS/BD秒脉冲和定位数据中的UTC时间信息,然后与UTC时间系统进行同步。
2)网络交换机与GNSS设备的NT进行同步。
3)网络交换机和网络上的各载荷终端NT进行同步。
(2)总线式网络
总线式FC-AE-1553局域网络的核心为NT-NC网桥单元,网桥单元作为主干网络的NT和局域网络的NC,通过与主干网络同步后,再对局域网络内载荷NT进行同步。总线式网络的时间同步模型如图5所示。

图5 FC-AE-1553总线式网络时间同步模型Fig.5 Time synchronization model of FC-AE-1553 bus network
总线式网络的时间同步与主干网络同步方式类似,但由于该网络为共享带宽网络,进行时间同步的载荷个数与精度需要与带宽进行折中。
2.2.3 相邻节点同步
载荷网络主机对各个NT节点的时间同步机制中,FC-AE-1553网络中相邻的网络节点为主从节点,主从时钟节点之间的同步过程如图6所示。

图6 FC-AE-1553主从节点同步过程Fig.6 Synchronization process between host and slave of FC-AE-1553 network
上述FC-AE-1553主从节点时间同步过程中,由主时钟先发送Sync帧,从时钟端收到后回复Delay_Req帧,主时钟收到后再发送Delay_Resp。发送端是在物理层发送时打上时间戳,接收端在从物理层提取数据帧后立即标记取得帧的时间[8]。
主从端的时间同步详细过程为:
1)Master端发Sync报文给Slave,Slave接收后记录该报文到达时间T2,Sync报文中同时包括其离开Master时的时间T1。
2)Slave端发Delay_Req报文给Master,Slave记录Delay_Req报文的离开时间T3,Master端记录其到达时间T4。
3)Master通过Delay_Resp报文把T4发给Slave,此时Slave获知Delay_Req报文的发送时间T3和接收时间T4,及Sync报文的发送时间T1与接收时间T2。
经过上述报文交互过程后,在Slave端可得到如下计算式:
T2-T1=offset+MS_Delay=A
(1)
T4-T3=SM_Delay-offset=B
(2)
其中,offset为晶振偏差,MS_Delay为主节点到从节点的链路延迟,SM_Delay为从节点到主节点的链路延迟。
设计时,时间同步协议的实现方式如图7所示,在FC-2之上实施时间同步。

图7 FC-AE-1553协议底层的时间同步实施Fig.7 Time synchronization process in protocol stack of FC-AE-1553 network
由于主从节点之间链路延迟MS_Delay等于从主节点之间链路延迟SM_Delay,则在Slave端可以得到:
(3)
(4)
Master和Slave间不断发送PTP协议报文,Slave端根据offset修正本地时间值,使之同步Master时间。
2.2.4 同步时间标签
时间同步协议采用的时间标签共48 B,其中T1、T2、T3和T4各占12 B,时间标签的详细设计如图8所示。
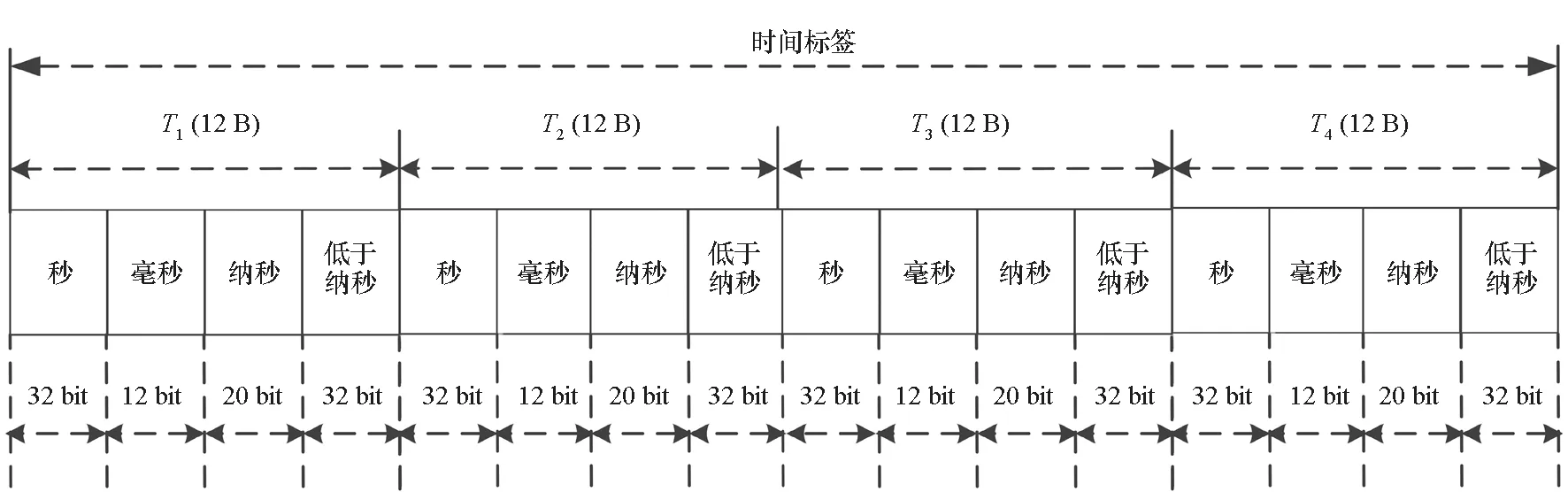
图8 时间同步时间标签Fig.8 The time stamp in time synchronization
其中,秒值为32 bit,全0代表1987年1月1日0时0分0秒,毫秒值占12位,纳秒值占20位。低于纳秒的值占32位,主要用于FC-AE-1553时间同步内部计算采用。
2.2.5 同步性能测试
各网络终端节点NC和NT的时间同步模块在FC-AE-1553协议体系中处于2P层和2M层之间[9],系统时钟设置为106.25 MHz,数据位宽设置为128 bit。各网络端口的具体实现方式如图9所示,通过物理层发送/接收时间戳方式避免了数据发送/接收的先入先出队列(First Input First Output,FIFO)带来的时间抖动,保证MS_Delay和SM_Delay的值相同。

图9 终端物理层发送/接收时间戳的方式Fig.9 Mode to receive time stamp in physical layer of terminal
通过搭建交换式主干网络环境,在不接入外部秒脉冲的条件下,只对具有FC-AE-1553接口的NC和NT进行时钟的主从同步,如图10所示。实际测试中,交换机的传输路径延迟一致,NC和NT的光纤连接长度为2 m,光纤的路径延迟误差测试为0 ns,示波器的测量精度为1 ns(下同)。在常温26 ℃测试20 min,测试结果如表3所示。
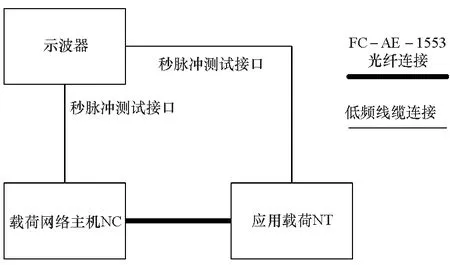
图10 无外部时钟源输入的时间同步测试连接图Fig.10 Test connection for time synchronization without external clock source

表3 主从时钟节点端之间的相对时间同步测试Tab.3 Relative time synchronization test between host clock and slave clock
当输入外部时钟源时,搭建测试环境如图11所示,在FC-AE-1553网络交换机上,连接高精度时钟源NT节点,外部高精度秒脉冲和时间信息最先进入该NT节点。NC和NT的光纤连接长度为2 m,光纤的路径延迟误差测试为0 ns。通过交换机的时间同步服务对载荷NT进行时间同步。测试验证时,分别从时钟源NT节点和载荷NT节点上输出测试秒脉冲,测量二者之间的时间同步误差。通过软件查看时钟源NT的秒值与载荷NT的秒值及秒以上时间一致后,观测示波器上的两个输入时钟源的误差。
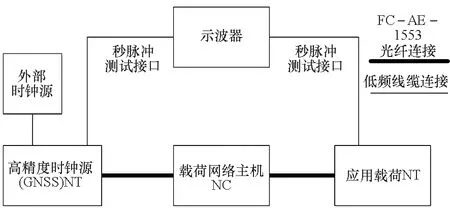
图11 FC-AE-1553网络高精度时钟同步测试连接图Fig.11 Test connection for time synchronization of FC-AE-1553 network
当设置同步周期为1 ms时,时间同步帧占用链路通信带宽小于0.8%;单级同步精度不超过±50 ns(常温26 ℃下,测试20 min)。实测结果如图12所示,通过示波器上的余晖,记录下长时间的时钟抖动情况,同步源和被同步源的时间误差保持在50 ns以内。
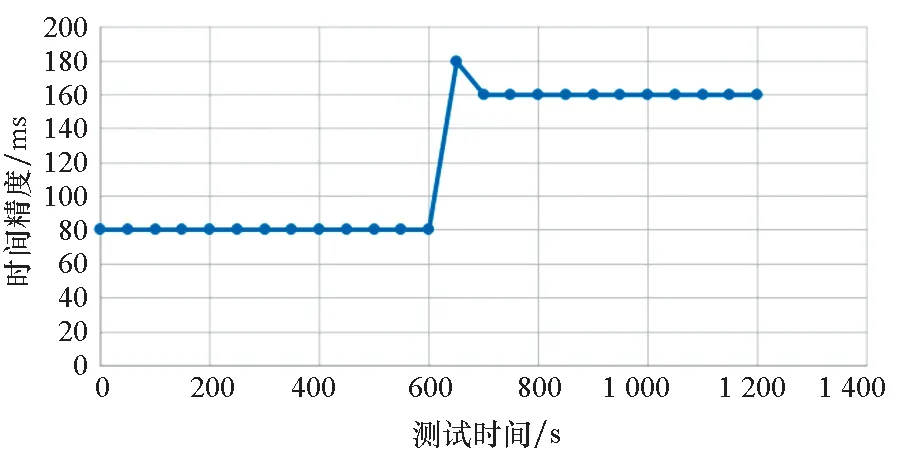
(a) 同步源时钟同步精度(a) Clock synchronization accuracy of synchronization source
当设置同步周期为500 ms时,时间同步帧占用链路通信带宽小于0.001 6%;单级同步精度不超过±100 ns(常温26 ℃下,测试20 min),实测结果如图13所示。通过示波器上的余晖,记录下长时间的时钟抖动情况,同步源和被同步源的时间误差保持在100 ns以内。
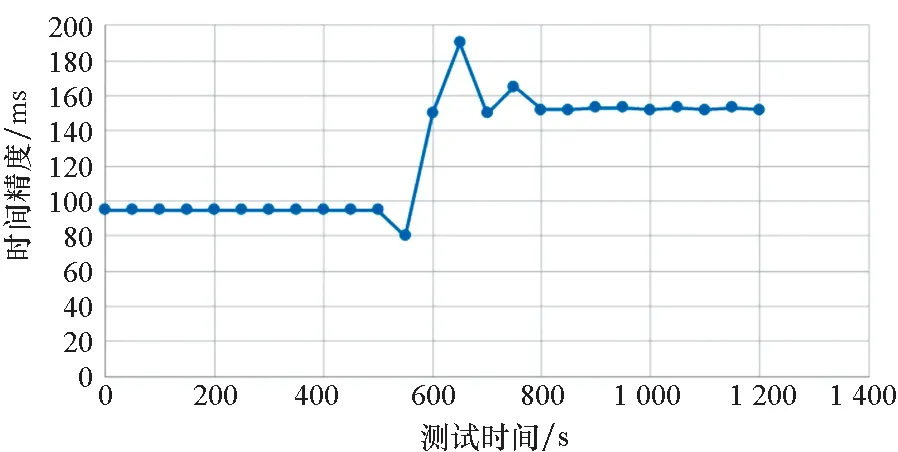
(a) 同步源时钟同步精度(a) Clock synchronization accuracy of synchronization source
同步周期与同步精度的对应关系如表4所示(常温26 ℃下,测试20 min)。
表4表明,同步周期越小,提供的时间精度越高,同步协议的通信占用总带宽资源越多,反之,同步周期越大,占用带宽资源越小,时间精度会下降。在交换式网络中,时间同步协议占用网络带宽的设计采用“并发交换式”动态带宽调度机制[10],占用静态分配带宽,以保证稳定带宽。测试中,多次重复实验均能达到稳定的同步效果。而总线式网络中,时间同步协议占用网络带宽的设计采用“一对多”和“多对一”的动态分配机制[11],合理解决了带宽分配问题。
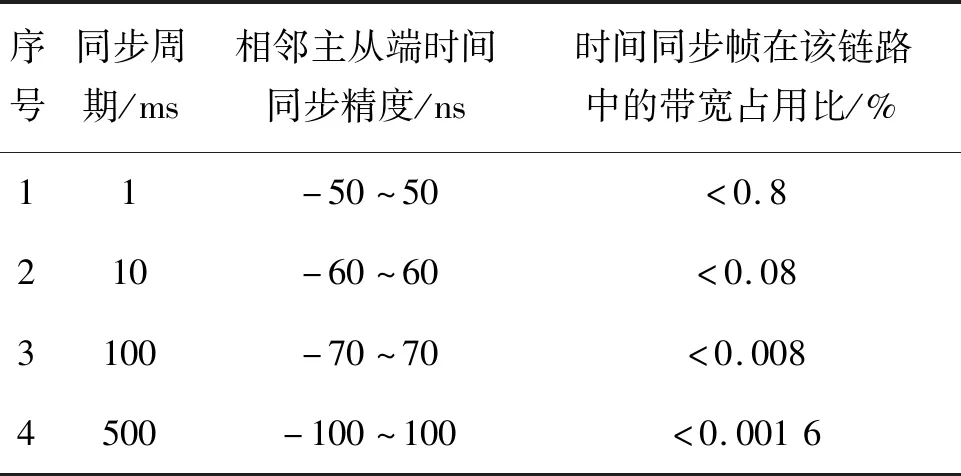
表4 同步周期与同步精度的对应关系Tab.4 Corresponding relationship between synchronization cycle and synchronization accuracy
另外,时间同步指标精度测试中,主从节点之间的光纤路径延时误差为0 ns。当光纤距离更长时,实际网络中可能存在一定的路径延迟时。当单端(主时钟或从时钟端)的接收延时和发送延时误差在20 ns左右时,主从时钟节点之间的误差最大为40 ns,理论上可造成的同步误差为20 ns。实际测试过程中,通过人为注入路径延时误差20 ns后,可增加同步精度误差20~30 ns。由于选用的电子学器件等级均为普军级或宇航级,符合舱内使用温度,预计环境温度对同步测试结果基本无影响,后续测试中将进一步考虑测试环境温度的实际影响程度。
2.3 共用信息分发
由于功能载荷的公共测量数据需要实时传输给有需求的载荷,而FC-2层的传输实时性优于FC-4层,不使用FC-AE-1553主从式交换数据方式,直接通过FC-AE协议通信,通信效率更高。因而,共用信息通过FC-AE-1553的FC-2层协议进行采集和发送,通过FC-AE-1553分层传输不同精度等级的时间基准和共用信息,载荷根据信息源来选择所需的数据,开展任务试验。共用信息在FC-AE-1553协议栈中的收发形式如图14所示。
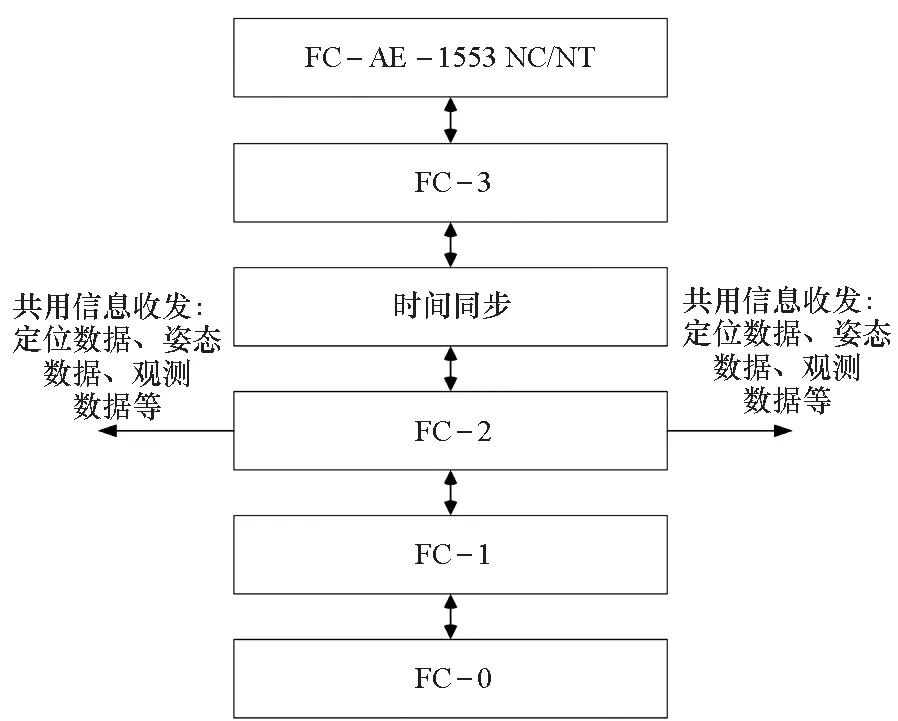
图14 共用信息分发Fig.14 Public information distribution
由图14可知,在实施时间同步的基础上,通过FC-2层,同步发送网络主机采集功能载荷的定位数据、原始观测数据、原始姿态数据或解算后的姿态数据等,传输延迟和时间基准误差累计均不超过1 ms。各应用载荷同时使用时间同步的时间基准和共用信息,采用时间码对齐方式,即可解析出自身所需的当前时间基准下(一般以整秒计)高精度定位数据和姿态数据,为载荷任务的实施提供所需的数据输入。共用信息分发的字节数和发送周期如表5所示。

表5 共用信息收发字节数和发送周期Tab.5 Public information bytes and sending cycle
3 时间基准实现分类
通过利用航天器平台提供的广播信息和秒脉冲硬接口,综合利用功能载荷GNSS设备的秒脉冲硬接口和定位信息,以及天文载荷的姿态原始数据等共用信息。在FC-AE-1553网络第2、3层之间实施时间同步,同时在第2层完成同步信息发送的功能,可支持应用载荷不同等级需求的时间基准和共用信息需求。
为了满足不同时间基准精度的需求,所采用的时间同步方式分类如表6所示,其中绝大部分应用载荷的时间基准信息可选择引入航天器秒脉冲、载荷GNSS秒脉冲的两种方式,再通过FC-AE-1553时间同步机制来解决。根据载荷的时间基准需求,载荷网络主机可实施两种外部秒脉冲接口的输入切换。而少数极高时间精度(Tb≤100 ns)需求的载荷可通过直接接入GNSS秒脉冲硬件接口并联合FC-AE-1553同步数据发送机制来满足;粗时间基准需求的载荷直接使用平台广播的时间信息和姿态轨道共用信息。

表6 不同时间基准性能需求的载荷时间同步方式Tab.6 Time synchronization modes of the payloads with different timing requirements
4 结论
通过分析和试验,可以采用不同的手段满足应用载荷的高精度时间同步和共用信息的多种需求。利用航天器秒脉冲和平台参数信息,可以解决对时间和姿轨数据等共用信息性能要求不高的载荷信息需求。统筹使用功能载荷GNSS设备的高精度时钟源和定位信息以及天文载荷的姿态原始信息,并通过FC-AE-1553网络时间同步机制,可以解决绝大部分载荷的高精度时间基准和位置解算需求。利用光纤网络传输优势,在FC-AE-1553协议底层,通过协议叠加的方式实现了IEEE 1588v2时间同步协议和同步数据发送功能,高效利用了高精度的时间基准和共用信息资源,弥补了专用信息接口资源设计的不足。设计验证表明,FC-AE-1553网络实施时间同步机制时,时钟源和共用信息来自功能载荷与来自航天器平台的信息源相比较,从功能载荷获得的时间基准精度和共用信息利用性能将高出3个数量级,载荷获取的UTC时间精度达到百纳秒量级。在光纤网络上叠加时间同步协议不仅提高了时间精度利用量级,还大大减少了秒脉冲和数据交换硬件接口的数量、减轻了载荷设计的复杂度和线缆设计的难度,为航天器设计节约了质量资源。
