无信号交叉口过街行人与司机演化博弈行为研究
2021-01-29雷爱国胡启洲李慧慧林娟娟
雷爱国,胡启洲,李慧慧,林娟娟
(南京理工大学 自动化学院,江苏 南京 210094)
我国经济迅速发展,城市化进程加快,机动车和过街行人为争抢资源冲突日益增多[1]。2014~2016年,我国发生在斑马线上的交通事故造成3 898人死亡,司机未按规定让行导致的事故占总量的90%。对无信号交叉口安全重视不足,导致行人交通事故死亡人数多,约占死亡事故总数的22%[2,3]。在无信号交叉口处的行人安全过街问题亟待解决。
应用博弈论解决交通问题,目前国内外已有较多研究。Wardrop[4]第1个将博弈理论引入交通路径分配,奠定了博弈论在交通问题领域的基础。刘光杰等[5]引入不确定性理论应用于两群体零和博弈过程。为解决支付值不确定问题,陈洪转等[6]做出不确定性下多矩阵博弈求解算法,用于计算重复博弈所产生的支付值的多元性。对于行人过街问题,覃鹏等[7]只从信号交叉口对行人和司机的博弈进行分析,黄选伟等[8]从驾驶员角度出发,建立司机与过街行人的博弈模型,得出司机的最优决策。Brigitte等[9]认为交通环境对行人过街安全问题影响较大,在无信号控制时行人等待极限阈值约为45 s[10]。研究显示,缩短行人等候时间,可降低行人过马路风险[11]。苑红伟等[12]用博弈论研究无信号交叉口行人过街问题,仅仅对过街行人的行为延误定量分析,没有分析司机对过街行人行为的影响。上述文献从行人角度或驾驶员单一角度出发研究有信号交叉口的情况,本文研究在无信号交叉口过街行人和驾驶员2个群体之间的博弈模型。首先调查驾驶员的礼让比例以及行人在不同等待阶段选择过街的比例,充分考虑博弈双方在选择过街时的博弈因素,分析博弈参数对双方演化博弈选择行为的影响,提高无信号交叉口行人过街安全性。
1 无信号交叉口的选取与过街行人行为调查
本文研究焦作市过街行人和司机在无信号交叉口的博弈行为。在无信号交叉口的数据调查包括:对无信号交叉口的基本数据信息采集,对不同行人等待时间调查和司机礼让比例调查,并对调查数据进行分析。
1.1 无信号交叉口基本信息
焦作市解放中路胜利街位于焦作市区主干道位置,属于商业中心区,道路北侧是居民区,南侧是集贸市场。共有10条公交线路在该交叉口上通过,由于没有信号灯分管控,人车冲突明显。鉴于此,选取该无信号交叉口作为博弈分析案例,解放中路胜利街抽象图如图1所示。所选路段的基础数据如表1所示。

表1 解放中路胜利街基础数据
1.2 无信号交叉口过街行人行为调查统计
本次调查7 d,为减少高峰时期带来的误差,采用人工计数法和视频录像法,每天白天随机抽取1 h,统计间隔为15 min,调查内容有4方面,分别为交通总流量、礼让车辆总数、未礼让车辆总数和行人在此处的等待时间。
(1)现状分析。于2017和2018年,在焦作市调查市区机动车共计超过55 000 pcu,司机礼让率仅为27%,焦作市居民认为斑马线不安全,在无信号交叉口司机礼让率很低。调查交通总流量、礼让车辆总数、未礼让车辆总数是为了统计焦作市司机在无信号交叉口礼让行人比例,并为下文过街行人和司机博弈仿真提供具体数据。
采用人工统计和视频计数相结合的方法,人工统计车辆数,反复观察视频记录。定义:主动礼让过街行人的即为礼让车辆,不礼让或者被迫礼让的为未礼让车辆,统计数据如表2所示。

表2 解放中路胜利街司机礼让情况
(2)问卷分析。调查过街行人在该处的等待阈值,即心理忍受的最大等待时间,超过这个阈值,过街行人不再等待,李明远等[13]认为司机主观等待时间为16.4 s、等待时间阈值为23.2 s,池利兵等[14]认为行人等待阈值为45 s,采用视频录制的方法,调查过街行人在斑马线前等待极限时间,问卷调查结果如图2所示。
(3)综合分析。由图2可知,51.19%的行人在斑马前等待阈值为30 s,92.86%的行人等待阈值≤60 s,得出行人等待阈值为30 s,并将行人在斑马线前的等待时间分为3个阶段,具体如表3所示。
调查行人数量共计782人,59.72%的行人极限等待时间在30 s以内,28.77%的行人在等待时间30~60 s期间通过斑马线,等待时间大于60 s的行人占比11.52%,与上述问卷调查结果基本吻合。

表3 过街行人等待时间
2 无信号交叉口过街行人与司机的博弈模型
演化博弈论即博弈理论和动态演化过程结合,用于分析不完全信息演化的稳定性。通过复制动态方程求解得到的演化稳定策略为演化均衡,具有较强预测能力,可用于分析过街行人与司机选择策略的变化趋势和稳定性。对模型做出3项假设。
假设1在博弈模型中,将司机和行人看作1个整体,行人和司机在博弈中视为独立的个体。
假设2在无信号交叉口处,存在2个有限理性的交通参与群体:过街行人和司机。
假设3设定各阶段行人通过斑马线率为xi,i=1,2,3;等待率为(1-xi);司机礼让率为yi;司机不礼让率为(1-yi)。
2.1 博弈模型的建立
基于上述假设,提出无信号交叉口过街行人与司机的博弈模型
H={O,U,E}
式中:O代表博弈参与人集合,包括过街行人和司机;U表示博弈双方的策略选择空间,U={U1,U2};U1表示过街行人的策略选择集合,且U1={通过,等待};U2表示司机的策略集合,且U2={礼让,不礼让};E代表博弈方的收益。
(1)过街时间的划分机理。根据在斑马线前的等待时间将过街行人心理变化情况分为3个阶段。当行人等待时间小于30 s时,行人还保持理性,为第1阶段;当行人等待时间在30~60 s,行人的理性思考能力与等待时间成反比,会增加交通事故的概率,行人碰撞损失K会远高于司机受到的损失R,为第2阶段;如果行人等待时间超过60 s,行人几乎不能保持理性思考,人车冲突更加严重,为第3阶段。行人与司机进行博弈产生的收益矩阵如表4~表6所示。表4~表6中的参数及其含义如表7所示。

表4 第1阶段司机与行人收益矩阵

表5 第2阶段司机与行人收益矩阵
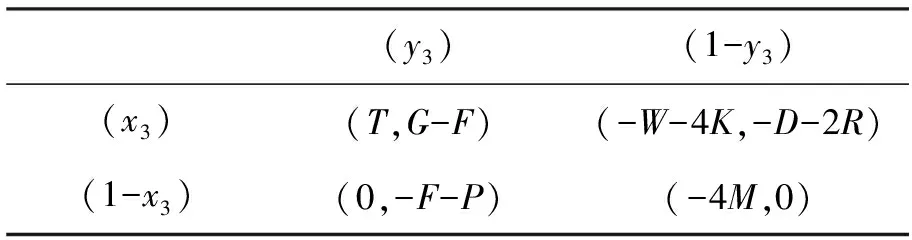
表6 第3阶段司机与行人收益矩阵

表7 参数及其含义
(2)危险系数的分级界定。无信号交叉口行人过街的交通冲突问题主要原因包括:第1,司机不能预测行人的动态,第2,过街行人对行进中的车辆速度和停止距离预测不准确,随着行人等待时间的增加,行人理性减少,与机动车碰撞的概率增加,相应的碰撞损失增加,若发生事故司机也应承担相应的碰撞损失,危险系数分级如表8所示。

表8 过街行人和司机延误损失
2.2 司机和过街行人的收益期望演化模型
(1)第1阶段过街行人和司机收益期望。由表4得,第1阶段过街行人选择通过斑马线策略的期望收益为Ep11,过街行人选择等待策略期望收益为Ep12以及平均期望收益为Ep1
Ep11=Ty1+(-W)(1-y1)
(1)
Ep12=0y1+(-M)(1-y1)
(2)
Ep1=x1Ep11+(1-x1)Ep12
(3)
司机选择礼让行人策略的期望收益为Ed11,司机不礼让行人策略期望收益为Ed12以及平均期望收益为Ed1
Ed11=(G-F)x1+(1-x1)(-F-P)
(4)
Ed12=-Dx1+0(1-x1)
(5)
Ed1=y1Ed11+(1-y1)Ed12
(6)
同理可以求得第2阶段和第3阶段过街行人和司机收益期望。
(2)演化模型的复制动态方程。由式(3)和(6)得,过街行人选择通过和司机选择礼让策略的复制动态方程分别表示为F(xi)和F(yi)[15]
(7)
(8)
由式(7)和(8)可以得出在第1阶段,过街行人和司机选择策略行为的动态复制方程分别为
(9)
(10)
将式(9)和(10)联合即为第1阶段过街行人和司机策略选择的动态演化模型,同理,可分别求出第2阶段和第3阶段过街行人和司机策略选择的动态演化模型。
2.3 行人与司机演化的博弈机理
在演化博弈模型的基础上,求得行人等待的每个阶段的均衡点并分析,可以发现过街行人和司机行为演化过程,得到过街行人和司机演化博弈模型最终稳定策略。

图3横轴表示行人通过率,纵轴表示司机礼让率。当行人过斑马线和司机礼让行人的行为比例初始状态位于OAHC区域时,行人会选择等待,司机不礼让行人。当行人和司机初始状态位于ABCH区域内时,选择通过策略的行人比例逐渐增加,选择礼让行人策略的司机比例逐渐增加,司机礼让过斑马线的行人。
第1阶段博弈双方鞍点值
(11)
第2阶段博弈双方鞍点值
(12)
第3阶段博弈双方鞍点值
(13)
(2)各个阶段局部稳定性分析。分别对第1阶段式(3)和(4)求出x1和y1的一阶偏导数,就可以得出第1阶段的雅可比矩阵
(14)
第1阶段雅可比矩阵的行列式结果为
|J1|=(1-2x1)(Ty1-My1+Wy1-W+M)·
(1-2y1)(Px1+Dx1+Gx1-F-P)-
x1(1-x1)(T+W-M)y1(1-y1)(P+G+D)
(15)
第1阶段矩阵的迹
tr(J1)=(1-2x1)(Ty1-My1+Wy1-W+M)+
(1-2y1)(Px1+Dx1+Gx1-F-P)
(16)
第2阶段矩阵的迹
tr(J2)=(1-2x2)(Ty2+2Ky2-2My2+Wy2-W-
2K+2M)+(1-2y2)(Px2+Dx2+Gx2-F-P)
(17)
第3阶段矩阵的迹行人等待3个阶段局部稳定性分析结果见表9~表11。
tr(J3)=(1-2x3)(Ty3+4Ky3+4My3+Wy3-W-
4K+4M)(1-2y3)(Px3+Dx3+Gx3+2Rx3-F-P)
(18)

表9 第1阶段局部稳定性分析结果

表10 第2阶段局部稳定性分析结果
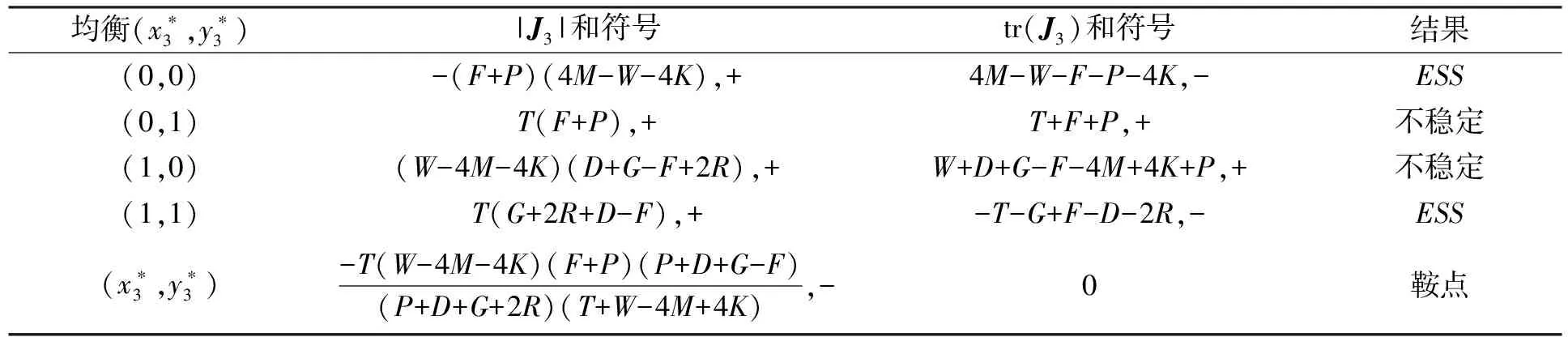
表11 第3阶段局部稳定性分析结果

3 案例分析
焦作市交通运输执法处广泛宣传“礼让斑马线”,并处罚不礼让行人的司机,调查显示司机的礼让意愿高达91.78%,但是64.29%的过街行人感觉斑马线安全度一般,为探究影响过街行人和司机的因素,对演化博弈模型进行参数仿真。为了更直观地展现演化路径,研究各参数对过街行人和司机策略选择系统最终的演化影响,用MATLAB仿真时,统一将参数无量纲化。
第1阶段仿真参数:T=1.5,F=1.0,P=1.5,W=2.0,M=0.5,D=3.0,G=2.0;第2阶段仿真参数:K=3.0,R=2.0,其余参数与第1阶段相同;第3阶段仿真参数与第2阶段仿真参数相同。
3.1 过街行人与司机的双方博弈演化
由调查结果得出司机选择礼让策略的概率为0.52,在行人等待的3个阶段中,行人选择通过策略的概率分别为0.40、0.65、0.91,可以判断随着等待时间的增加,过街行人选择通过策略的概率逐渐增大,分析3个阶段行人选择通过概率的不同和仿真参数改变对双方演化博弈的影响。
3.1.1 过街行人收益演化
在行人等待的3个阶段中,过街行人在3个阶段选择通过概率的不同和仿真参数改变对过街行人收益演化产生影响。
(1)第1阶段过街行人收益演化。在第1阶段过街行人与司机双方博弈中,过街行人的收益T、M和W演化趋势如图4所示。
图4是行人等待第1阶段双方博弈后行人收益演化趋势,纵坐标X表示行人选择通过策略的概率,行人选择通过策略的概率为0.40,随着行人通过收益T和等待损失M的增加,使行人选择通过的概率更快地收敛于1,经过4次演化后,系统则更快地收敛于状态(1,1),而增加行人因司机未礼让导致恐慌费用W与T和M相反,系统最终稳定在状态(0,0)。
(2)第2阶段过街行人收益演化。在第2阶段过街行人与司机双方博弈中,博弈参数T、M、W和K演化趋势如图5所示。
图5是第2阶段行人收益演化趋势,行人选择通过策略的概率为0.65,随着行人通过收益T和等待损失M的增加,使行人选择通过概率更快地收敛于1,经过2次演化后,系统则更快地收敛于状态(1,1),而增加行人因司机未礼让导致恐慌费用W和行人碰撞损失K,则会使行人选择等待策略快速收敛于0,最终演化系统稳定在(0,0)。
(3)第3阶段过街行人收益演化。在行人等待第3阶段过街行人与司机双方博弈中,过街行人的收益T、M、W和K演化趋势如图6所示。
图6是第3阶段行人收益演化趋势,行人选择通过策略T的概率为0.91,显然随着行人通过收益T、等待耗费损失M、行人因司机未礼让导致恐慌费用W和行人碰撞损失K的增加,使行人选择通过策略的概率更快地收敛于1,系统最终演化为状态(1,1)。
3.1.2 司机收益演化
行人等待的3个阶段中,行人选择通过概率的不同和仿真参数改变对司机收益演化产生影响。
(1) 第1阶段司机收益演化。在第1阶段过街行人与司机双方博弈中,司机的收益D、F演化趋势如图7所示。
图7是第1阶段司机收益演化趋势,纵坐标Y表示司机礼让率y。司机选择礼让策略的概率为0.52,随着因不礼让的惩罚D和礼让成本F的增加,司机选择礼让策略的概率y更快地收敛于1,且演化过程由曲折变得直接,系统则更快地收敛于状态(1,1)。
(2)第2阶段司机收益演化。在第2阶段过街行人与司机双方博弈中,司机的收益D、F和R演化趋势如图8所示。
图8是第2阶段司机收益演化趋势,显然随着司机因不礼让惩罚D、礼让成本F、碰撞损失R的增加,司机选择礼让策略的概率y更快地收敛于1,且演化过程由曲折变得直接,系统则更快地收敛于状态(1,1)。
(3)第3阶段司机收益演化。在第3阶段过街行人与司机双方博弈中,司机的收益D、F和R演化趋势如图9所示。
图9是第3阶段司机收益演化趋势,显然随着司机因不礼让惩罚D、礼让成本F、碰撞损失R的增加,司机礼让率y更快地收敛于1,且演化过程直接,系统则更快地收敛于状态(1,1)。
3.2 仿真参数敏感度对演化结果的影响
通过以上分析可以发现,演化博弈参数影响主要内容总结为:T、D、R、M的增加对x,y曲线的上升有促进作用;K、F、W值的增加对x,y曲线的上升有抑制作用。将尝试通过改变参数的值来增加斑马线前司机的礼让率。
3.2.1 促进曲线上升的参数
对于促进x,y曲线的上升的演化博弈参数T、D、R、M,在行人等待的3个阶段中:
(1)增加参数D的值。演化结果表明增加对未礼让司机处罚,能有效遏制司机不礼让。
(2)增加参数R的值。演化结果表明如果司机受到碰撞损失较大的情况,司机会选择礼让策略。
(3)增加参数T、M的值。演化结果表明应该合理减少过街行人在斑马线前的等待时间。
3.2.2 抑制曲线上升的参数
对于抑制x、y曲线的上升的演化博弈参数K、W、F,在行人等待的3个阶段中:
(1)增加参数K的值。第2阶段司机和行人博弈中,演化结果表明行人仍保留部分理性。但是在第3阶段,因等待时间过长,过街行人已失去理性思考能力,即使有危险,过街行人仍会选择通过。
(2)增加参数W的值。在第1阶段和第2阶段司机和行人博弈中,过街行人选择等待,但是在第3阶段,由于等待时间过长,行人会选择通过。
(3)增加参数F的值。在第1阶段和第2阶段增加参数F的值,系统收敛于状态(0,0),表明当礼让的费用较高时,司机会更加趋向于不礼让行人。
综上所述,在过街行人与司机3个阶段的演化博弈中,博弈参数值的增加或减少没有使演化系统立刻达到稳定状态,但通过多次演化博弈,最终的演化稳定状态为(1,1)或(0,0),参数值有关于过街行人收益,演化博弈过程中,过街行人先于司机达到演化稳定点状态;参数值有关于司机收益,在演化博弈过程中,司机先于过街行人达到演化稳定点状态;博弈双方都想实现自身的利益最大化,与现实相符。
3.3 建议及干预措施
对于无信号交叉口,随着行人的不断过街,处于等待状态的司机等待时间过长会选择不再礼让,过街行人选择等待;随着滞留的过街行人等待时间增加,一些行人由于无法忍受较长时间等待而选择冒险穿行,司机则被迫选择减速让行。
(1)减少行人等待时间。无信号交叉口的事故源头是因为行人等待时间太长而失去理性,过街行人属于弱势群体,建议在无信号交叉口人车严重冲突区域安装交通执法闭路电视摄像头,给予司机警示,能减少过街行人的等待时间。
(2)加强行人过街约束。由于过街行人和司机交替通过无信号交叉口,在严格要求司机的同时,必须要对过街行人的行为加以约束,行人随意横穿马路、礼让时行人不通过和司机等待时间长是司机在礼让时遇到3个最大的问题,增加对行人随意横穿街道的惩罚,有利于提高司机礼让行人比例。
(3)减少司机礼让等待时间。无信号交叉口司机礼让率低的1个原因是司机因礼让时间长,司机不愿礼让行人,因此减少司机礼让等待时间,能有效提高礼让率,对于司机礼让行人极限等待时间统计数据如图10所示。
图10显示,司机礼让行人极限等待时间普遍为30~60s,占总数的90.41%,司机在礼让行人时往往等待时间很短,因此为避免司机频繁停车,可以合理减少斑马线的数量,避免行人持续通过,可以增加过街红灯,从而减少司机的停车礼让时间。
综上所述,减少过街行人等待时间、减少司机礼让等待时间和加强行人过街约束,既能在减少司机等待的同时,有效提高司机在无信号交叉口出的礼让率,保证行人安全,又能使过节行人和司机达到利益最大化。
4 结束语
在无信号交叉口涉及过街行人和司机利益情况下,双方都想实现自身的利益最大化,通过对无信号交叉口过街行人和司机行为演化博弈进行分析,得到博弈双方的2种均衡状态,仿真研究结果与实际无信号交叉口调查数据对比,符合实际,可作为制定相关交通法规的参考,通过调整博弈矩阵某些参数,定向调整博弈双方的演化方向以此来缓解无信号交叉口行人过街困难问题和安全问题,避免状态(0,1)和(1,0)浪费资源的情况。
由于无信号交叉口行人与司机行为具有动态性和时间维度的多变性,本文考虑过街行人和司机诸多因素,但仍有一些问题需要深入探究:
(1)正是因为无信号交叉口具有复杂的多变性,考虑影响过街行人和司机选择策略的因素不够全面;
(2)本文将行人等待时间分为3个阶段,跨度较大,另外调查车辆较少,后续研究将扩大样本数据,缩小时间跨度,进一步提升本文研究的合理性。
