新型翻盖移动式垃圾压缩设备
2021-01-29张红欣邹凤刚
张红欣 邹凤刚
山东五征环保科技股份有限公司 山东日照 276800
1 前言
目前,市场现有的移动式垃圾压缩设备,主要由压缩箱体、料斗、动力单元3部分组成。当料斗放下时,设备的投料口为敞口状态,垃圾压缩设备内的垃圾臭气弥漫,造成空气污染;当设备露天使用时,在风吹雨淋、高温暴晒等极端天气下,不可避免地会出现雨水进入设备,出现垃圾污水外溢,垃圾飞溅、臭味弥漫等问题[1]。
市场现有的移动式垃圾压缩设备大都没有彻底解决上述问题的方案,只有一些厂家在入料口处设计一个可前后滑移的滑盖,在料斗放下时该滑盖可覆盖投料口。但是,该机构仍存在缺陷:一是料斗与滑盖相对运动时,滑盖不能提前滑移,阻碍垃圾倾倒,且垃圾倾倒时易飞溅到滑盖上;二是当投料口处垃圾堆积较高时,滑盖滑移过程中会与堆积较高的垃圾产生干涉,致使滑盖无法正常滑移,甚至滑盖将垃圾推落到箱体外部,造成垃圾对环境的二次污染。
针对以上问题,笔者以市场现有17 m3移动式垃圾压缩设备为研究对象,结合市场现有的垃圾收集模式和收集环境,设计了一种新型翻盖移动式垃圾压缩设备,该设备采用六杆翻盖机构,可180°无死点翻转,料斗倾倒垃圾时翻盖可提前翻转打开,彻底解决了阻碍垃圾倾倒及垃圾飞溅的问题;同时设备投料口在整个作业过程中全封闭,无雨水进入、污水外溢、垃圾外溅现象,有效解决了垃圾臭味四散、导致病菌传染等问题。该六杆翻盖机构采用UG三维建模软件和CAE分析软件对机构整个运动过程的受力和强度进行综合分析,并验证其设计的合理性。
该移动垃圾压缩设备不受场地限制,无需基建投资,易于搬迁,只需有380 V电源即可作业,适合在基建征地困难区域或有大型聚会等人群密集的临时场所使用。设备结构紧凑,机、电、液一体化集成,压缩比大,作业高效,整个垃圾清运系统投资少,操作方便,便于管理,可灵活变换作业场地。
2 设备的结构设计及工作原理
新型翻盖移动式垃圾压缩设备主要包括料斗、翻转机构、压缩箱体、动力单元、后门和六杆翻盖机构6大模块。设备结构如图1所示。

图1 翻盖移动式垃圾压缩设备
动力单元主要为整个压缩设备提供动力,动力单元驱动能源是380 V电源。当散装垃圾集中倒入垃圾装载料斗后,在PLC控制程序驱动下,动力单元中的电机工作并带动液压油泵工作,为执行元件翻转油缸提供液压油,翻转油缸的活塞杆伸出进而推动翻转机构向上翻转,带动垃圾装载料斗向上翻转,同时由翻转机构带动后盖板推杆,联动内旋转板、外旋转板和前盖板拉杆,将前盖板和后盖板一起向后翻转,打开压缩箱体的投料口,待垃圾装载料斗内的散装垃圾倒入压缩箱体的投料口后,动力单元驱动压缩箱体的压缩机构进行散装垃圾的预压缩,达到压缩减容的目的,同时实现压缩箱体投料口由封闭状态转变为开口状态。
一次上料完成后,动力单元驱动翻转机构回复原位,同时带动垃圾装载料斗、后盖板和前盖板回复原位,确保后盖板和前盖板将压缩箱体的投料口封闭,压缩箱体的投料口由开口状态转变为封闭状态,实现散装垃圾收集过程压缩箱体完全封闭。即使压缩箱体投料口处垃圾堆积较高时也不会出现垃圾阻碍翻盖运动和推动垃圾外掉等隐患,反而翻盖对垃圾进行垂直压缩,提高了设备的压缩比和作业效率。
设备转运作业流程:使用钩臂车将移动式垃圾压缩设备卸放到指定作业点,把动力单元电源插头接入380 V电源,使用遥控器翻下料斗,环卫工人将垃圾送往移动式垃圾压缩设备作业点并将垃圾倒入移动式垃圾压缩设备料斗内,通过翻转机构动作将垃圾倒入压缩设备压缩仓,最后通过推铲将垃圾压入箱体中,直到满箱报警;将料斗通过翻转机构翻到压缩仓上部,断开压缩设备动力单元电源,钩臂车将满箱设备起吊上钩臂车,通过钩臂车上的锁紧锁箱装置将压缩设备与钩臂车牢固连接,然后把车辆与压缩设备后门快插接头插好。在驾驶室内通过取力即可操作后门开闭,钩臂车将满载垃圾的设备转运至垃圾焚烧厂即完成了整个作业流程,如图2所示。
3 设备的功能特点
3.1 推铲机构及其工作原理
推铲机构(如图3所示)采用双油缸驱动,两只油缸交叉布置,可缩短压缩仓长度。推铲与箱体采用小间隙、水平运动设计,有效防止垃圾被带入压缩腔后部;推铲机构采用W型设计,具有破碎、压缩减容功能,可减少垃圾转运次数,降低垃圾转运费用。

图2 设备作业流程图

图3 推铲机构三维数模
3.2 箱体密封系统创新设计
箱体密封系统主要由自主创新锁紧机构和四道楞结构硅胶条组成,锁紧机构由浮动油缸、上下锁止钩总成等组成,该机构具有安装方便、启闭灵活、机构自锁等特点,在油缸内泄、管路渗漏情况下,仍能保障箱体与后门的可靠密封,有效解决垃圾收集和转运过程中普遍存在的二次污染问题。锁紧机构自锁状态如图4所示。
3.3 液压控制系统的组成及其原理
液压控制系统(图5)由内啮合齿轮泵、阀块、电磁卸荷阀、单向阀、压力开关、电磁控制阀、液压锁、主推油缸、举升油缸、后门锁紧油缸、液压接头、液压管路、液压油箱等组成。由齿轮泵提供的高压油进入多路换向阀,高压油被分配给相应的油路,完成相应的机构作业动作。通过PLC程序控制电磁阀,完成料斗倾倒或推铲压缩垃圾等作业。多路阀内设有溢流阀,防止系统过载。举升油路中油缸上设置了液压锁和节流阀,使料斗上升、下落平稳并且速度可调,能在任何位置长时间停留。

图4 锁紧机构自锁试验图

图5 液压控制系统
4 六杆翻盖机构设计
4.1 压缩箱体
压缩箱体是17 m3移动式垃圾压缩设备的主要工艺设备,用于存储压缩后的垃圾,主要由框架、压缩机构、后门等主要模块组成。该部分材质板料主要采用CR780/980MS、610L(其中压缩机构和箱体底板材质采用高强度耐磨钢)等高强度材料,箱体两侧板采用整板制作,无任何焊缝。箱体采用高密度喷丸处理,并采用汽车面漆,内表面涂防石击涂料,双重防腐蚀措施保证箱体经久耐用。
4.2 六杆翻盖机构设计
平面连杆机构是所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计往往比较复杂,因此,在轨迹较为复杂的机械设计中以五杆和六杆机构更为常见[2]。 结合17 m3移动式垃圾压缩设备的工作规律以及投料口处的特点,该翻盖机构采用六连杆机构进行设计,以压缩箱体为机架,翻转机构为原动件,箱体投料口处的盖板为执行构件,在动力单元的驱动下实现压缩箱体投料口处翻盖的联动开启和关闭。
如图6、7所示,应用UG三维建模软件构建基于六连杆机构的六杆翻盖机构[3],将压缩箱体看做机架,其余连杆为活动构件,该六杆翻盖机构可简化为如图8所示的六连杆机构运动简图。该机构全部由低副(即旋转副)构成,其中连杆L1为原动件,连杆L5为执行构件,机构自由度计算公式如下:

式中,F为机构自由度;n为机构中活动构件数;Pl为机构中低副个数;Ph为机构中高副个数。
由计算可知F=1,即该六杆翻盖机构的自由度为1,满足机构具有确定运动的条件——机构的原动件数目应等于机构的自由度的数目。

图6 六杆翻盖机构关闭状态

图7 六杆翻盖机构开启状态
4.3 六杆翻盖机构受力分析
六连杆机构运动简图如图8所示,其中,连杆L1为翻转机构,连杆L2为后盖板推杆,连杆L3为内旋转板,连杆L4为外旋转板,连杆L5为后盖板。

图8 六连杆机构运动简图
利用UG三维建模软件中的运动仿真模块,按照图8所示的六连杆机构运动简图创建相关连杆和运动副。由于该机构的实际动力输入为翻转油缸的输出力,但该输出力大小受定量泵特性限制为恒定值,不易作为运动仿真的驱动输入。因此取翻转机构(连杆L1)的旋转角度作为该机构的驱动输入,并将旋转驱动施加在连杆L1上,驱动函数为:STEP(time, 0, 0, 5, 85),运动时间设定为0~5 s,连杆L1最大旋转角度为85°,运动仿真中各构件的材料属性直接继承UG三维建模软件中所赋予的材料属性。
运动过程中点O、A、B、C、D、E处的运动副受力情况如图9所示。

图9 点O、A、B、C、D、E处的受力
由图9可知,以上5点的最大受力情况如表1所示。

表1 点O、A、B、C、D、E处运动副最大受力情况
如图10所示,只有点C处的加速度变化较大,其余各点的加速度变化很小,C点为杆L4和杆L5的铰接点,并且由图9可知,整个运动过程中点C受力突变很大,点O、D、E三点均为连杆与机架的铰接点且各点处受力突变也较大,点A、B两点为二力杆的两端点且加速度的突变很小,因此,整个机构运动过程需重点校核点C、O、D、E4点的强度和刚度。

图10 点O、A、B、C、D、E处的加速度
4.4 六杆翻盖机构的有限元分析
用ANSYS Workbench软件对该六连杆机构进行静态工况的强度和刚度有限元分析,根据图9、10所示,取机构在2.65 s时的状态为研究对象,有限元模型如图11所示。

图11 六杆机构有限元模型
4.4.1 网格划分
有限元模型中由于零件尺寸和形状差异较大且不规则,对关键位置处的网格要求比较精细,因此模型整体采用Automatic Method方法、关键位置处进行局部网格细化的方法进行网格划分,模型网格采用结构单元,局部网格细化区域采用六面体网格,其他区域以四面体网格为主,整体网格大小为10 mm,局部细化网格大小为5 mm。
4.4.2 边界条件
根据第 2节描述的设备工作原理,取机构在 2 .65 s时的状态为研究对象,参考图 7六杆翻盖机构开启状态和图8六连杆机构运动简图对模型施加边界条件:给点O、点D和 点E处 的机架设置固定约束,给点H、点G和点F分别施加相应的外载荷,其中:点H为调节连杆与翻转机构的铰点;点G为 翻转油缸与翻转机构的铰点;点F为后盖板与前盖板的铰点。
通过第4.3节中六连杆机构的运动仿真可获知,机构在2.65 s时点H、点G和 点F3 点处的外载荷大小如表 2所示,各点受力方向如图 1 2所示。

表2 点H、点G和点F处的外载荷大小。

图12 机构2.65 s时点H、点G、点F外载荷方向示意图
该有限元模型边界条件加载后如图13所示。

图13 模型边界条件
4.4.3 云图分析
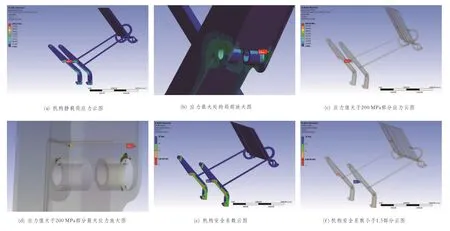
图14 六杆机构静载下应力云图
整个机构在静载荷工况下的应力云图如图14所示,由图中可见,机构整体应力偏低、安全系数相对较高,只是在点O、点A、点G和点H4点处及其对应连杆的应力值相对较大,安全系数相对较低,尤其在点G附近出现最大应力和最低安全系数值。由图14(b)可知,最大应力发生在连杆内部加强筋尖角处,为局部应力集中,而点G是该机构的驱动力作用处,因此此处为该机构的危险点。但该连杆所用材料为Q345B的高强度板材,最大应力远小于材料的许用应力,满足材料的使用要求。
由图14(f)可见,安全系数小于1.5的部分很少,主要集中在连杆内部加强筋尖角处。
综合以上分析,该机构在静载工况下,机构整体强度在设计方面完全满足使用要求。
5 结语
本文以市场现有17 m3移动式垃圾压缩设备为研究对象,结合市场现有的垃圾收集模式和收集环境,设计了一种采用六杆翻盖机构的新型翻盖移动式垃圾压缩设备。文中阐述了新型翻盖移动式垃圾压缩设备的工作原理和特点,与市场现有的众多移动式垃圾压缩设备相比,该设备整体密闭设计,有效解决了雨水进入、污水外溢、垃圾外漏、臭味弥漫等问题,杜绝了二次污染;能够满足智能、高效、环保、节能的要求。采用UG三维建模软件和CAE分析软件对机构整个运动过程中各关键点进行了受力和强度分析,分析结果表明该六杆翻盖机构的设计合理有效,能够满足使用要求。