电动汽车电机复合制动控制系统研究
2021-01-28尹永福
尹永福
(烟台汽车工程职业学院 车辆运用工程系, 山东 烟台 265500)
0 引言
汽车已经成为现代社会中不可缺少的交通工具,提供了巨大的便利,使用数量不断增加的传统燃油汽车使石油资源短缺及环境污染问题日益突出,在汽车工业领域以新能源汽车为代表的汽车电动化发展已成为大势所趋。电动汽车因具备能量来源充足、低排放等优势而受到广泛关注,成为新能源汽车的一种有效解决方案,但由于受到电动汽车续航里程及电耗方面不足的限制而降低了使用性能,成为限制电动汽车广泛应用的主要制约因素。针对电动汽车的制动能量通过机电复合制动系统进行回收利用成为增加续航里程的有效方式,已成为行业内的研究热点之一。为兼顾制动性和能量回收率本文完成了针对电动汽车复合制动系统的控制策略的设计和优化,在确保稳定制动的同时完成有效制动能量的回收过程。
1 需求分析
随着电动汽车的快速发展及应用范围的不断扩大,对电动汽车性能的要求不断提高,作为延长电动汽车行驶里程的一种关键技术和有效方法,再生制动通过对制动时的动能进行回收从而实现能量利用率的提高,具备响应迅速及控制精确优势,考虑到再生制动电机所能提供的制动力矩有限,可通过液压制动弥补这一不足。目前针对复合制动系统方面的研究已经取得了一定的进展,多目标遗传算法成为解决问题及优化控制策略的常用手段,例如,优化目标采用油耗(百公里)和排放指标,在循环工况下在选择混合动力系统工作模式时通过多目标遗传优化算法的使用完成全局优化过程,从而实现控制逻辑参数的精准获取;以回收能量最大化理论为依据设计的制动力分配策略,针对优化过程通过遗传算法的使用实现约束问题的有效解决;针对汽车的多目标问题(以操作稳定性和行驶平顺性为主)采用近似模型完成了优化过程的研究和设计,该近似模型基于响应面,获取了较佳的优化结果。现有的再生制动策略大多仅以制动方向稳定性作为研究重点,由于对制动效能恒定性的重视不足导致理想制动下的研究存在一定的缺陷[1]。本文在现有研究的基础上运用多目标遗传算法对复合控制策略进行了协同优化,使制动稳定性及能量回收效率得到进一步提升。
2 复合制动控制策略优化
电动汽车由液压制动及电动机再生制动系统复合而成的复合制动系统以分配复合制动力与完善控制策略作为研究重点,优化复合制动系统控制策略则是满足需求的有效手段,最大程度回收制动能量的同时需确保制动性能,复合制动系统的控制策略直接影响到包括制动感觉一致性的制动性能、协调切换制动模式等问题,优化控制策略的过程属于多目标、多边界问题,是提高整车性能的有效途径,既存在联系又存在冲突的不同优化目标为协同优化多个性能指标提出了更高的要求。
2.1 控制策略
协调电动机与机械的制动力需采用不同的工作方式,因此电动汽车复合制动系统结构不同,包括串联与并联两种,并联再生制动系统存在液压制动力不可调的不足,对应再生制动系统结构较为复杂,为弥补上述不足本文的再生制动系统结构采用单轴串联的方式。控制策略流程,如图1所示。
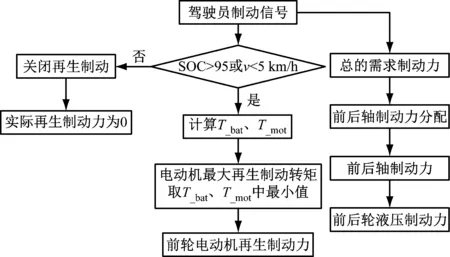
图1 再生制动控制策略流程
在基本不改变原车制动系统的基础上,通过将一个调压阀安装于前轴液压制动管路上实现调节前轴液压制动力的功能,在降低开发成本的同时使该系统结构对制动能量的回收优势得以充分发挥。前、后轴制动力在车辆制动状态下以机械制动力分配系数为依据完成分配过程,同时将再生制动与否(电动机再生制动力的提供与否)以当前车速、蓄电池荷电状态值(分别由v、SOC表示)为依据进行判断,计算获取电动机再生制动转矩(蓄电池最大充电功率下)和电动机允许的峰值输出转矩分别由T_mot和T_bat表示,将前轴所需制动力同其进行比较,实际电动机再生制动力取较小值[2]。系统制动力的分配主要包括两部分即影响制动安全性能的前、后轴制动力及影响制动能量回收的液压及电动机制动力,制动力分配需在确保车辆安全的同时使回收制动能量过程得以有效实现,并据此对控制策略进行优化。
2.2 设计变量的选取
制动过程制动力分配系数因受到电动机再生制动力的影响会发生变化,前、后轴制动力的分配过程不再以制动系统的固定比例进行,将制动力分配系数(由β表示)以ECE制动法规为依据实现在某一合理变化范围内的有效控制,以确保实现提升制动效能及制动稳定性的设计目标,蓄电池相关参数(包括内阻及充放电效率)会受到SOC值的影响,进而影响到蓄电池的能量利用率。再生制动能量回收效率以电动机制动力作为主要的衡量指标之一,且电动机再生制动转矩的最大值同其有效再生制动功率的最大值并不对应,假设,蓄电池荷电状态的最大值由HSOC表示、最小值由LSOC表示,电动机再生制动转矩由Tm_reg表示(单位N·m),轴制动力分配系数由β表示,针对复合制动系统队变量X进行优化设计,X的表达[3],如式(1)。
X=[β,Tm_reg,LSOC,HSOC]T
(1)
2.3 目标函数
(1) 制动稳定性目标函数
制动稳定性在复合制动的影响下会发生变化,对于前驱型电动汽车,由于车速对电动机再生制动力矩的有效较大,前轴在再生制动力矩过大的情况下会发生后轴抱死进而影响前轮转向能力,并且导致附着利用率曲线超出合理范围,对方向稳定性及制动效率产生不利影响,本文的制动稳定性的目标函数采用了前、后轮附着利用率(满足ECE要求),路面附着情况由附着系数进行表征,通过对制动时汽车的受力分析,假设,制动强度由z表示,z强度下第i(取值为1或2,分别对应前轴和后轴)轴上的利用附着系数由φi表示,z强度下i轴上的地面制动力及地面对其法向反力分别由FXbi、FZi表示,定义φi的表达[4],如式(2)。
φi=FXbi/FZi
(2)
汽车在复合制动情况下,假设,G表示整车载重,电动机再生制动力由Fm_reg表示,整车质心高度由hg表示,整车质心到前轴距离由a表示、到后轴距离由b表示,L(L=a/b)表示汽车轴距,前轴利用附着系数由φ1表示,后轴利用附着系数由φ2表示,如式(3)、式(4)。
(3)
(4)
路面附着条件在φ1和φ2越接近同制动强度的情况下发挥得越充分,证明制动力分配越合理,制动稳定性的目标函数F的表达,如式(5)(即前、后轮附着利用率)。
(5)
(2) 制动能量回收效率目标函数
最终在蓄电池中存储电动机再生制动过程产生的制动能量,制动能量的回收效率受到蓄电池及电动机的充、发电效率的影响,电动机转速及制动转矩影响其发电效率。针对制动能量回收效率,以最终获取的有效再生制动功率作为其目标函数。假设,电动机转速由ωm表示,蓄电池工作温度由TBtem表示,由η表示的蓄电池联合效率函数关系表达[5],如式(6)。
η=f(Tm_reg,ωm,SOC,TBtem)
(6)
制动能量回收效率的目标函数表达,如式(7)。
MaximizeP=Tm_regωmf(Tm_reg,ωm,SOC,TBtem)
(7)
2.4 约束条件
假设,电动机再生制动转矩上限在满足ECE规定、满足蓄电池最大充电功率及满足电动机峰值转矩的情况下分别由Tm_ece、Tm_bat和Tm_mot表示;原车制动力分配系数由βH表示,优化后则由βmax表示,目标函数优化过程需对汽车轴制动力、制动同地面附着条件的关系、电动机峰值转矩、蓄电池充电功率等[6]进行考虑,如式(8)。
Tm_reg=min(Tm_ece,Tm_bat,Tm_mot)
βH<β<βmax
z/φ1≥70%
(8)
在z大于0.3的情况下φ2的取值不超过(z-0.018)/0.74。
3 多目标优化遗传算法应用
对于多目标优化问题,协调和折中多个目标(存在竞争关系)是求解的关键所在,其实质在于寻求决策空间中的Pareto非劣解集。不受问题限制的遗传算法具备较强的全局搜索能力,有利于种群多样性和均匀性的保持,适用于求解多目标问题,为有效弥补传统多目标优化方法缺少客观性的不足,本文所采用的多目标遗传算法基于Pareto解集,使遗传算法的优势(包括随机性和隐含并行性)得以充分发挥,可针对多目标问题进行全局范围的搜索以获取最优解,使复合制动系统优化问题得以有效解决。作为一种多目标遗传算法,非支配排序遗传算法(NSGA-Ⅱ)在收敛性、分布性及运行效率上表现出强大的优势,通过精英策略的引入实现优秀个体从父代种群到子代种群的直接引入过程,为使算法以概率1搜索到最优解,混合所有个体后(包括父代与子代)完成无支配性排序,以确保种群的多样性。本文采用NSGA-Ⅱ算法完成双目标优化问题的求解。计算过程,如图2所示。
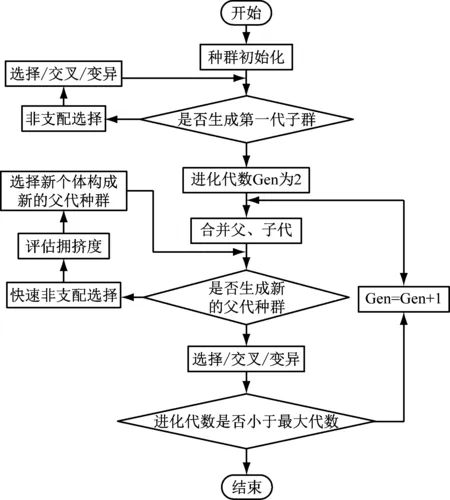
图2 NSGA-Ⅱ算法流程
优化过程的参数设置为:种群规模为20,交叉率和变异率分别为0.8、0.1,用Matlab模型构建多目标问题后,将其集成到优化软件Isight中通过设计变量实现对控制策略中关键参数的优化,完成本文算法的优化过程(包括自动搜索及迭代运算),Pareto非劣解集经迭代运算后即可获取[7]。为确保生成个体为一,需在预设约束范围内对初始及子代种群进行取值,初始种群、第50代及第100代多目标优化结果良好,非劣解数目在种群进化到100代时明显增加,个体表现出良好的分布性,Pareto前沿分布均匀,目标函数到第100代种群时达到最终收敛,对应获取一组Pareto最优解(各最优解间无优劣之分)。仿真模型参数选取一组优化结果,如表1所示。
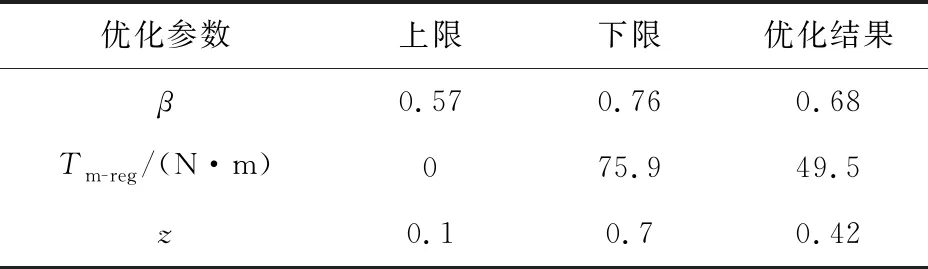
表1 参数优化结果
4 仿真测试
为了检测本文所设计电动汽车制动系统控制策略优化方法的性能,针对典型的制动工况在Matlab平台上完成再生制动仿真模型的建立及仿真分析过程,通过该模型对驾驶员制动意图进行模拟,完成常规制动及循环工况仿真,能够分析评价不同控制策略,制动指令(由控制系统发出)向整车动力学模型直接传递,整车满载质量为1 240 kg,蓄电池总电压为342.4 V、容量为120 Ah。仿真主要参数设置,如表2所示[8]。
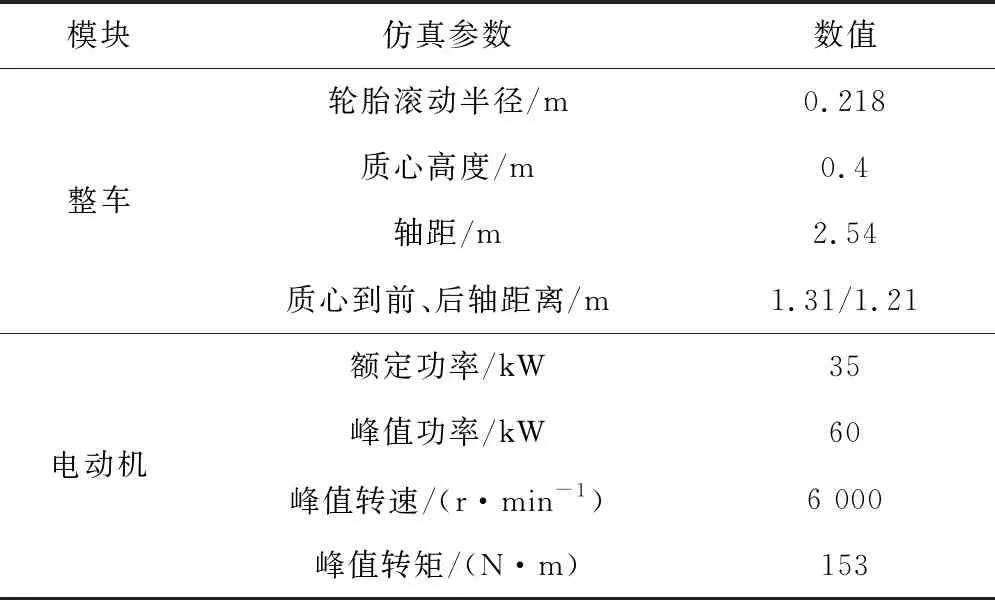
表2 仿真参数
制动强度在0.15~0.33间波动,再生制动系统参与度同波动的频繁度成正比,波动越频繁说明再生制动能量利用率及回收率越高,优化后的制动力分配(即制动力变化趋势),在制动初始时所需制动力(由电动机单独提供)较小,轴液压系统在2.5 s后参与制动,随后电动机与液压系统共同参与以满足不断增加的制动力需求,实现能量回收效率最大化(通过最大再生制动转矩状态),直到制动稳定。优化后的再生制动能量回收效果更佳,证明了本文优化后控制策略能够使再生制动能量回收率得以显著提升。
5 总结
在回收电动汽车整车制动能量方面,高效的复合制动系统控制策略会直接影响到回收效率,为此本文主要对制动系统控制策略进行了设计和优化,主要优化目标在于制动性能的稳定及较高的能量回收效率,在对多项约束条件进行充分考虑的基础上,通过多目标遗传算法的使用协同优化控制策略中的关键参数,仿真实验结果验证了本文所构建的控制策略的有效性,能够使电动机制动能量回收优势得以充分发挥,并有效提高了制动能量的回收效率。