基于EDEM-Fluent仿真的餐厨垃圾渣液分离机设计与试验
2021-01-25王浩璇王一鸣张永华毛新兵张天会
王浩璇 果 霖 王一鸣 张永华 毛新兵 张天会
(1.云南农业大学机电工程学院,云南 昆明 650201;2.河南工程学院土木工程学院,河南 郑州 451191)
餐厨垃圾是城市固体垃圾的主要组成部分之一,截至目前堆存量高达70亿t,占地5.3万hm2[1]。餐厨垃圾属于高油脂固液混合型有机物,在被清除的同时仍可以对其进行资源化回收利用,中国现有的餐厨垃圾处理方法主要包括焚烧、填埋及机械化处理方式。随着工业自动化的发展,餐厨垃圾机械化处理方式包括大型餐厨垃圾处理生产线以及小型餐厨垃圾处理设备。大型餐厨垃圾处理生产线以餐厨垃圾的集中处理为前提,资金投入较大,设备运维成本较高。当餐厨垃圾处理量较少时,往往无法在保证成本的前提下进行集中作业[2]。小型餐厨垃圾处理设备体积较小,具有便携性和简易性的特点,但其作业形式单一,多采用粉碎直排的方式处理餐厨垃圾,无法对餐厨垃圾中丰富的有机物料进行资源化利用,处理效果十分有限。
当前,相关领域的学者对新型餐厨垃圾处理设备展开了研究:黄将诚等[3]设计了一种食物垃圾处理器,但是该设备在控制系统的设计上存在不足,导致垃圾处理不够彻底,资源浪费现象较严重;金荣通等[4]设计了一款厨余垃圾预处理器,使得居民可以在家中对厨房食物垃圾进行初步的处理,但是无法实现有效的固液分离;刘芳霞[5]设计了一种食物垃圾处理器,利用电机带动研磨刀盘进行高速旋转来粉碎食物垃圾,但是粉碎后的餐厨垃圾直接排入下水管道,造成了餐厨资源的浪费;李静等[6]设计了一款日处理量600 kg的餐厨垃圾处理器,但是不具备杂物筛选功能,无法有效筛选餐厨垃圾中所含有的玻璃、铁器等硬物,对机器会造成较大的损伤。
针对目前餐厨垃圾处理设备所存在的缺陷,笔者拟设计一种高集成化、高自动化、低能耗和低运行成本的集送料、粉碎、压缩、脱水于一体的餐厨垃圾渣液分离机。同时,通过EDEM软件建立相应的颗粒模型,并结合Fluent软件中的重整化群RNGk—ε湍流模型对餐厨垃圾粒子运动进行仿真分析,以优化设备各个重要参数,使得设备对餐厨垃圾的固液分离处理效率达到最优,以期为新型餐厨垃圾处理设备的设计和优化提供一定的参考依据。
1 工艺流程图
根据中国人餐饮习惯和餐厨垃圾的特点,该餐厨垃圾渣液分离机以实现餐厨垃圾资源化利用为目的,符合中国餐厨废弃物的回收现状,且通用于社区街道、学校、食堂、酒店以及垃圾处理厂。该设备对餐厨垃圾进行处理后得到液态和固态两种形式的物质,液态可进一步收集然后集中处理,减少了污水直排对环境造成的污染。被减容的固态残渣可以烘干、打包,便于储存和运输。根据使用环境的要求,编制如图1所示的餐厨垃圾渣液分离机工作过程工艺流程图[7]。
2 主体结构
该餐厨垃圾渣液分离机包括主体结构及辅助送料装置,主体结构由粉碎装置和固液分离装置组合而成,应用SolidWorks软件绘制出主体部分的结构图,如图2所示。
2.1 工作原理
在进行餐厨垃圾处理时,首先启动破碎机和驱动电机对餐厨垃圾中较大或较硬的物料进行粉碎处理。破碎机采用双齿辊式破碎机,当两个齿轮啮合时,餐厨垃圾被研磨粉碎。餐厨垃圾颗粒通过调节齿间隙与齿顶隙达到粉碎所需颗粒大小的要求,在餐厨垃圾颗粒自身重力的作用下,通过齿轮磨辊的转动,逐渐脱离粉碎室,图3为粉碎机理示意图。

图1 工艺流程图Figure 1 Process flow chart
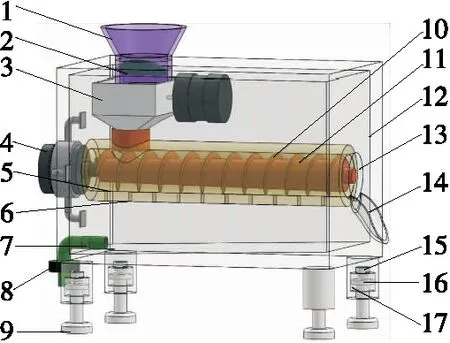
1.进料口 2.防护板 3.破碎机 4.驱动电机 5.防漏网 6.通液孔 7.出液管 8.阀门 9.支撑脚 10.螺旋叶片 11.螺杆 12.箱体 13.出料口 14.出料导轨 15.减震弹簧 16.滑杆 17.滑筒图2 主体结构图Figure 2 Structure of main part
被粉碎后的餐厨残渣向下落入输送桶中,在螺杆的旋转以及螺旋叶片的推动作用下,餐厨碎渣在输送桶内由左往右进行移动,随着空间逐渐变狭窄而慢慢被挤压。在挤压过程中,水分通过通液孔落在设备内的底部,最后从出液管流出。被挤压的固态渣块则从出料口出料,之后可进行固态残渣的收集,从而实现了高效的渣液分离。
2.2 颗粒的动力学分析
当螺旋轴转动时,螺旋叶片会给予餐厨颗粒一个法向推力N1,同时由于颗粒与螺旋叶片接触面的切线方向存在切向摩擦力f1,故颗粒受力为N1和f1的合力F。合力F可分解为沿螺旋轴的轴向分力Fz,以及圆周方向分力Ft。颗粒在轴向分力Fz的作用下,在输送桶内沿水平方向移动。同时,在圆周方向分力Ft的作用下,在输送桶内沿螺旋轴翻动。颗粒的受力图如图4所示。

1.齿轮磨辊 2.餐厨垃圾 3.垃圾颗粒图3 粉碎机理示意图Figure 3 Principle of comminution

图4 颗粒受力图Figure 4 Particle stress diagram
2.3 螺旋叶片的参数计算
粉碎后的餐厨垃圾进入到固态残渣输送桶内,在螺旋叶片的作用下从左往右移动。由于螺旋叶片的旋转速度会对垃圾粒子的运动情况产生影响,而这直接关系到固液分离的效果,所以需要对这一关键部件进行参数计算。考虑到设备工作时,螺旋叶片会受到较大的压力以及摩擦力,因此选用耐磨性较高的材料作为螺旋叶片的制作材料。同时考虑到设备的造价成本,拟采用普通碳钢作为螺旋叶片的制作材料。
螺旋叶片的直径D按经验式(1)计算[8]:
(1)
式中:
K——特性参数,取0.165;
Q——餐厨垃圾在输送桶内的运送能力,设计为1 t/h;
φ——餐厨垃圾在输送桶内可以填满螺旋叶片间距的系数,取0.8;
ρ——餐厨垃圾的密度,取1 t/m3;
C——餐厨垃圾在倾斜的螺旋叶片输送作用下的校正系数,取1。
代入式(1),得螺旋叶片的直径D为0.18 m。
3 辅助送料装置
现有的大部分餐厨垃圾处理设备无法有效地分离出垃圾中含有的铁器等金属硬物,对机器会造成较大的损伤。与现有方法不同的是,该设备增加了一个带有预处理的辅助送料装置,包含自动送料桶以及可伸缩导入槽两个机构,主要实现自动送料与筛选金属硬物的功能。应用SolidWorks软件绘制出自动送料桶以及可伸缩导入槽的结构图,如图5、6所示,设备整体结构如图7所示。
使用时,将收集的餐厨垃圾放入垃圾桶中,垃圾桶在底部凹槽和上部护栏的共同作用下被稳定地固定。启动驱动电机,推杆带动提升架缓慢上升,垃圾桶随着垃圾桶座垫同步平稳上升。当上升到最高位置后,垃圾桶在皮带和滚轮的共同作用下,完成倾倒动作。当餐厨垃圾流经带有强磁场的导入槽时,餐厨垃圾中的金属硬物会被吸附在导入槽上,从而达到筛除餐厨垃圾中含有的金属硬物的目的,如图8所示。

1.底座 2.垃圾桶座垫 3.垃圾桶 4.护圈 5.滚轮 6.皮带 7.滚轮架 8.驱动电机 9.提升架 10.电动推杆图5 自动送料桶Figure 5 Automatic feeding barrel

1.支架 2.可调倾角块 3.螺旋调微杆 4.齿轮 5.齿条 6.导管 7.导管固定块图6 可伸缩导入槽Figure 6 Retractable guide slot
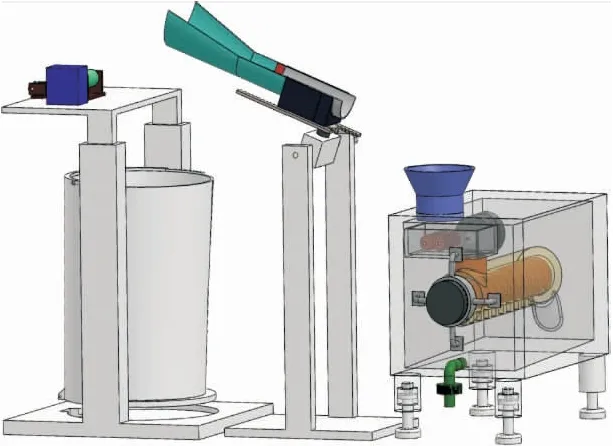
图7 整体结构图Figure 7 Overall structure
考虑到设备使用一段时间后,导入槽上吸附的金属硬物较多时,会影响后续餐厨垃圾的流入,故需要对导入槽进行定期的清理。由于导入槽为可伸缩结构设计,方向可自由调节,故在清理导入槽上吸附的金属硬物时可将槽口调整方向,以防清理的金属硬物通过进料口落入设备内部。考虑到每桶泔水桶内的餐厨垃圾中金属硬物含量不均匀,故不能将设备使用次数作为衡量筛除出的金属硬物多少的标准,因此采用可视化原则。当被吸附的金属硬物占比达到导入槽面积的1/5时,由于导入槽上吸附的金属硬物较少,可通过人工采用钢丝刷除去导入槽上的金属硬物,并用自来水将导入槽冲洗干净。当被吸附的金属硬物占比达到导入槽面积的1/3时,此时导入槽内吸附的金属硬物较多,可将经高压泵加压后的水,按照一定的射流流速和角度进行分流且加速喷到导入槽的表面来进行清理。通过多次试验可知,将水流速度加压至312 m/s,喷嘴与导入槽水平面之间夹角为50°~60°时,清理效果最好。
4 EDEM离散元仿真
4.1 前处理
EDEM软件是世界上第一个用现代化离散元模型设计的用来模拟和分析颗粒处理和生产操作的通用CAE软件,通过模拟散状物料加工处理过程中颗粒体系的行为特征,协助设计人员对各类散料处理设备进行设计、测试和优化[9-11]。考虑到粉碎后的餐厨颗粒在输送桶内的运动是由移动和转动两种运动组合而成,记单个颗粒为i,颗粒之间的相互作用力为控制方程[12]式(2)和式(3),相互作用力矩为式(4)和式(5)。由于离散元法是利用经典牛顿第二定律来求解颗粒在运动瞬间的速度、受力、运动轨迹等运动状态[13],因此利用EDEM离散元仿真,可以对粉碎后的餐厨垃圾在输送桶内部的运动过程进行高精度的模拟并进行准确的数据分析。
(2)
(3)
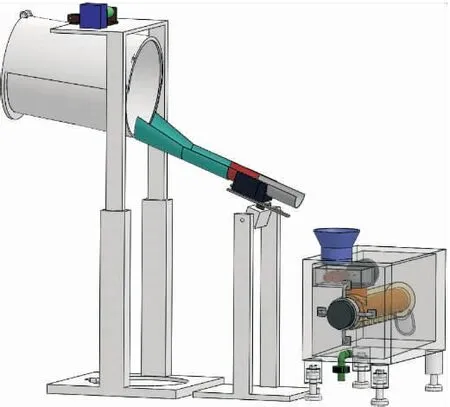
图8 工作示意图Figure 8 Working diagram
Mtij=Rij×Ftij,
(4)
(5)
式中:
Fnij——颗粒i、j之间的法向接触力,N;
Ftij——颗粒i、j之间的切向接触力,N;
Mtij——切向力Ftij产生的力矩,N·mm;
Mrij——颗粒i、j之间的滚动摩擦力矩,N·mm。
选取富含纤维的芹菜,较硬的骨头,日常主食之一的大米等具有代表性的食物,进行餐厨垃圾的粉碎试验,并对其进行取样,记录相关的试验数据如表1所示。根据取样记录的试验数据,在EDEM软件中插入颗粒模型并设置相关参数,如图9所示。
同时,设置螺杆运动为图10所示的沿轴心的往复旋转运动,设定转速为150 r/min。
4.2 离散元求解
进入Simulation模块设置仿真变量,其中固定时间步为30%,总计仿真时间为5 s,采样频率为0.05 s。点击Progress进行仿真分析,仿真过程如图11所示。

表1 餐厨垃圾碎渣取样记录表Table 1 Sampling record of kitchen waste mm
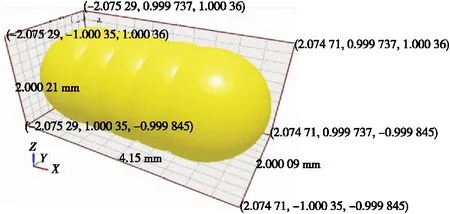
图9 插入颗粒模型Figure 9 Insert particle model

图10 轴心Figure 10 Center of axis
进入Analysis界面进行数据后处理,选择Display中的Particles模块。在Color By中选择Velocity,获得颗粒在输送桶内随螺杆运动时的速度云图及相对应的速度变化数据;在Color By中选择Force,获得颗粒在输送桶内随螺杆运动时的力场云图及相对应的受力变化数据。
4.3 数据与分析
经过计算,得到颗粒在输送桶内运动时的颗粒速度图、颗粒受力图、颗粒运动轨迹图,如图12~16所示。
由图12、13可知,餐厨碎渣在输送桶的整个运动过程中速度保持在0.05~0.07 m/s,说明餐厨碎渣在输送桶内运转稳定。在4.75 s时,颗粒的运动速度达到最大值0.14 m/s,此时餐厨碎渣运动到输送桶的最右端即出料口处。由图14、15可知,餐厨残渣在输送桶内运动的过程中,随着时间的增加,受到的力也逐渐增大。在4.9 s时,餐厨碎渣受到的力最大(1.49 N),此时餐厨碎渣从出料口出料。由图16可知,当餐厨残渣在输送桶内运动时,餐厨残渣多在输送桶的下半部运动,随着螺杆的往复转动在出口处完成出料。

图11 离散元仿真Figure 11 Discrete element simulation

图12 颗粒速度Figure 12 Particle velocity

图13 颗粒速度变化图Figure 13 Change of particle velocity
5 Fluent流体仿真
5.1 建模及网格划分
为了可以高精度还原餐厨垃圾粉碎后,垃圾粒子的运动情况,将垃圾残渣的运动拟合为一种流体运动[14-15]。同时,为了有效降低仿真模型算法的复杂度,对主体装置进行流体域的抽取,仅保留流体流经的部分。经过简化,得到的流体域模型如图17所示。设置四面体网格数量为508.38万个,导入Fluent转化成多面体网格为111.076 9万个,网格节点数量为96.003 2万个。网格质量最小0.14,最高为1.00,网格划分如图18所示。
5.2 参数及边界条件的设定
根据装置的特点,粉碎后的餐厨垃圾在输送桶内随螺杆同步运转,考虑到餐厨垃圾中含有的油水混合物,故餐厨残渣所做的是一种复杂的、无规则的、随机的非定常的紊流运动。为了可以高精度还原该运动情况,将餐厨残渣的运动拟合为RNGk—ε湍流模型,该模型来源于瞬态n—s方程,采用重整化群(Renormalization Group,RNG)的数学方法来计算湍流流态,输运方程为式(6)和(7),其适用于求解旋转流动。
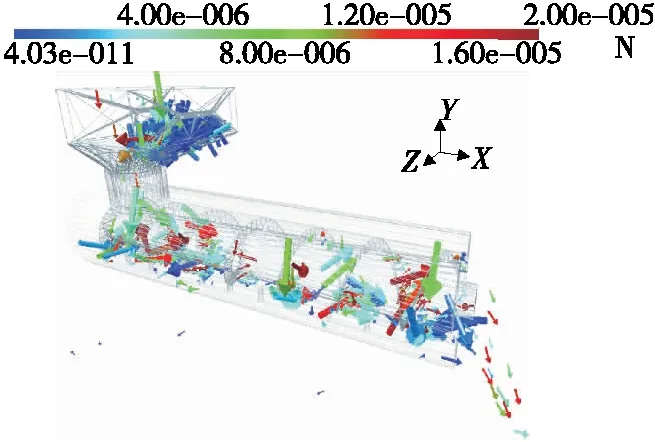
图14 颗粒受力Figure 14 Particle stress

图15 颗粒受力变化图Figure 15 Change of particle stress

图16 颗粒运动轨迹图Figure 16 Particle trajectory
(6)
(7)
在Fluent软件中选择旋转流动算法,壁面附近采用标准壁面函数。启用DPM模型(Discrete Phase Model)即拉格朗日离散相模型,创建入口喷射粒子模型,颗粒直径为5 mm,颗粒喷射流量为0.1 kg/s。压力速度耦合方式采用SIMPLE算法,梯度采用最小二乘法。连续相材料选择液态水,离散相选择固体颗粒。入口选择质量流量入口,质量流量值为0.1 kg/s。出口选择压力出口,出口压力为0。旋转域采用MRF滑移网格模型,转速为150 r/min,旋转方向选择x轴方向。
5.3 数据与分析
经过计算,得到了流体域模型的速度云图、旋转域速度矢量图,如图19、20所示。
由图19、20可知,餐厨碎渣在输送桶内部沿螺杆旋转运动时速度较稳定,与EDEM离散元仿真分析中得到的结论一致。在出液管处,流体的速度达到最大值,表明从餐厨垃圾中分离出的油水混合物从出液管口处快速流出。结合EDEM离散元与Fluent流体仿真分析,餐厨碎渣在输送桶的整个运动过程中,速度保持恒定。在出液管处,油水混合物的速度达到最大值。当油水混合物从出液管流出后可对其进行收集然后集中处理,减少了污水直排[16-18]对环境造成的污染。在出料口处,餐厨残渣的速度达到最大值,此时受力也达到最大值。当固态残渣从出料口出料后,可对固态残渣进行收集,再烘干、打包,便于储存和运输,满足了对餐厨垃圾“无害化、减量化、资源化”的处理要求[19-20]。

图17 流体域模型Figure 17 Fluid domain model

图18 网格划分Figure 18 Grid generation
5.4 实验验证
制出该餐厨垃圾渣液分离设备的样机,试验采用学校食堂泔水桶的餐厨垃圾作为原始物料,通过测量出料口挤出物料的产量Me,式(8)所示;挤出物含水率W;原始餐厨垃圾物料的含水率W0;过滤液产量Ml,式(9)所示;以及设备的处理量M,式(10)所示,5个指标来测试设备的性能。在设备稳定运转的情况下,挤出物料在出料口的出料速度,以及出液管口处过滤液的流出速度应保持匀速。采用WL-01T型餐厨垃圾含水率测定仪测量挤出物料的含水率W,以及原始餐厨垃圾物料的含水率W0,试验数据记录如表2所示。
(8)
(9)
M=Me+Ml,
(10)
式中:
Me——挤出物料在出料口处单位时间产量,kg/h;
M1——挤出物料的产量,kg;
T1——在出料口处接取挤出物料的时间,s;
Ml——过滤液在出液管口处单位时间产量,kg/h;

图19 速度云图Figure 19 Velocity cloud
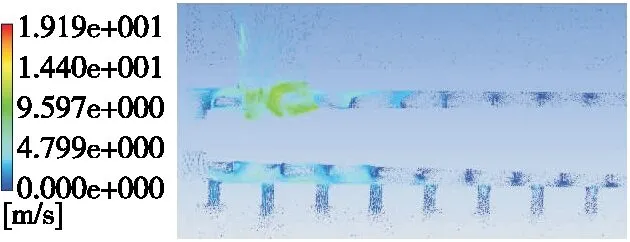
图20 旋转域速度矢量图Figure 20 Velocity vector diagram in rotation domain
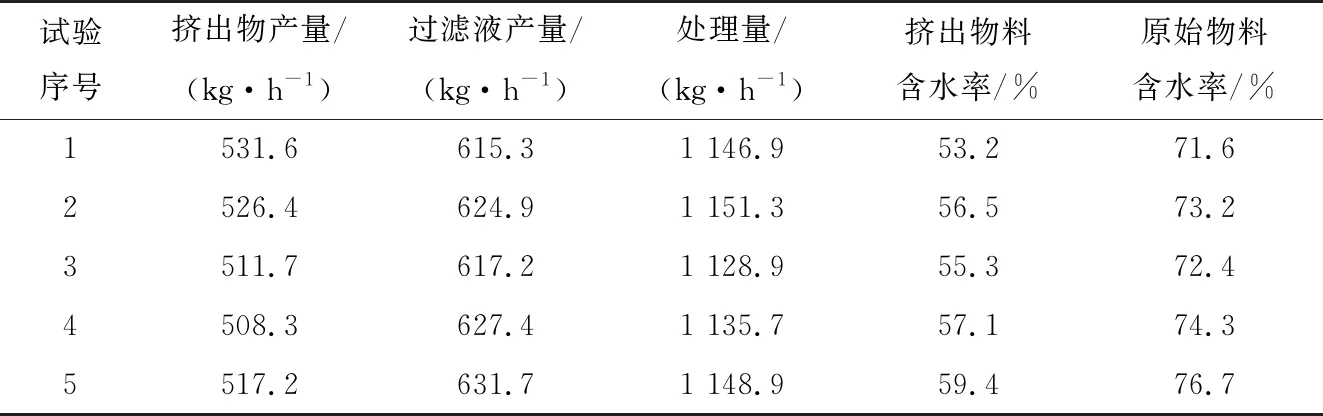
表2 试验数据表Table 2 Test data
M2——在出液管口处接取的滤液的重量,kg;
T2——在出液管口处接取滤液的时间,s;
M——设备的处理量,kg/h。
多次试验结果为:样机平均处理量为1 142.34 kg/h,挤出物料的平均产量为519.04 kg/h,过滤液的平均产量为623.3 kg/h,挤出物料含水率均值为56.3%,相较于原始餐厨垃圾物料的含水率均值73.64%,含水率减少了17.34%。设备运转稳定,挤出物料在出料口处的出料速度,以及出液管口处过滤液的流出速度均保持匀速。
6 结论
试验设计的餐厨垃圾渣液分离机集送料、粉碎、压缩、脱水于一体,通用于社区街道、学校、食堂、酒店以及垃圾处理厂,可实现餐厨垃圾的资源化利用,且符合中国餐厨废弃物的回收现状。
通过EDEM和Fluent软件,对其进行了离散元及流体建模仿真分析以优化螺杆及螺旋叶片的运动,进而提高餐厨垃圾固液分离的效率。仿真分析以及样机试验结果表明:餐厨碎渣在输送桶内的整个运动过程中,速度保持恒定。在出料口处,餐厨残渣的速度达到最大值,此时受力也达到最大值。在出液管处,油水混合物的速度达到最大值。该设备较好地实现了将餐厨垃圾固液两相分离的目标,达到了预期的设计效果。