基于子阵列自适应成像的RCS测量方法
2021-01-22廖可非欧阳缮
廖可非, 刘 扬, 欧阳缮
(1.桂林电子科技大学 信息与通信学院,广西 桂林 541004;2.桂林电子科技大学 卫星导航定位与位置服务国家地方联合工程研究中心,广西 桂林 541004)
随着雷达技术的发展,雷达的探测能力不断提高,隐身技术成为了增强突击能力或保护自身的重要手段。而在雷达探测中,目标的隐身性能强弱取决于其雷达散射截面积的大小。因此雷达散射截面积获取对于隐身技术的研究和隐身飞行器的设计有着重要的指导意义,是电磁研究领域的重要研究方向之一。现有的雷达散射截面积获取方法主要包括理论计算和实际测量[1-4]两大类。其中,基于三维成像的实际测量借助微波三维成像理论等多种技术手段,提供了更为丰富、便捷的测量方式,并可进行近场、外场测量,使得基于三维成像的雷达散射截面积测量技术成为研究热点之一[5-8]。
在基于三维成像的雷达散射截面积测量当中,为了保证分辨率,需要进行大观测角测量。在试验中发现,该方法对于角反射器等复杂目标的成像效果并不好,原因是回波存在相位非相参现象[9]。在实际测量中,相位非相参现象会存在于包含角反射器[10]、腔体等结构的测量中,如汽车、飞机进气口等,这种现象将大大影响基于成像的雷达散射截面积测量精度。
针对上述难题,提出了一种基于子阵列自适应成像的雷达散射截面积(radar cross section,简称RCS)测量方法。本方法通过设置一个互相关系数,将天线全阵列自适应划分为若干个子阵列,每个子阵列各自对目标区域进行成像并反演RCS,将所有的RCS曲线按各子阵对应角度进行拼接,即可得到完整的RCS曲线。本方法减少了回波不相参现象对RCS测量精度的影响,同时保留了基于三维成像的RCS测量将目标与成像背景分离,对目标局部单独测量等独特优势。
1 算法原理
1.1 全阵列成像RCS测量
全阵列成像RCS测量包括三维成像和RCS反演两部分。
三维成像原理为通过单个阵元的移动构造出一个虚拟的二维天线阵列。根据综合平面波理论,当虚拟阵元的间隔不大于奈奎斯特(Nyquist)采样准则,即λ/2时,虚拟阵列发出的波可以近似为平面波[6]。在近场测量的情况下,可以使用三维后向投影(back project,简称BP)成像算法得到目标的三维像[5]。
RCS反演则是使用远场散射函数,重建散射场,提取目标不同散射角度、不同频率的散射系数,将其反演为远场RCS。
在对某些目标进行大观测角测量时,在不同的角度上,其散射特性也大不相同,会极大影响全阵列成像的成像质量。因此,全孔径成像RCS测量存在局限性。
1.2 子阵列成像RCS测量
BP算法是一种逐点扫描,对回波进行补偿后相参累加的算法。但是,当回波不相参时,BP算法的成像效果会大打折扣,从而影响RCS反演的准确性。因此,本算法通过将互不相参的子天线阵列识别并分离出来,保证每块子阵列内阵元回波的相参性,从而确保子阵列对应的RCS曲线的正确性。
1.2.1 自适应子阵列划分
对于不同的目标,其回波的不相参情况也不同,所以子阵列的划分也应各不相同。同时,在很多情况下,无法根据目标的先验信息事先对全阵列进行大致的划分。因此,有必要提出一种自适应的子阵列划分方法,应对测量复杂目标时的划分需求。具体划分方法如图1所示。
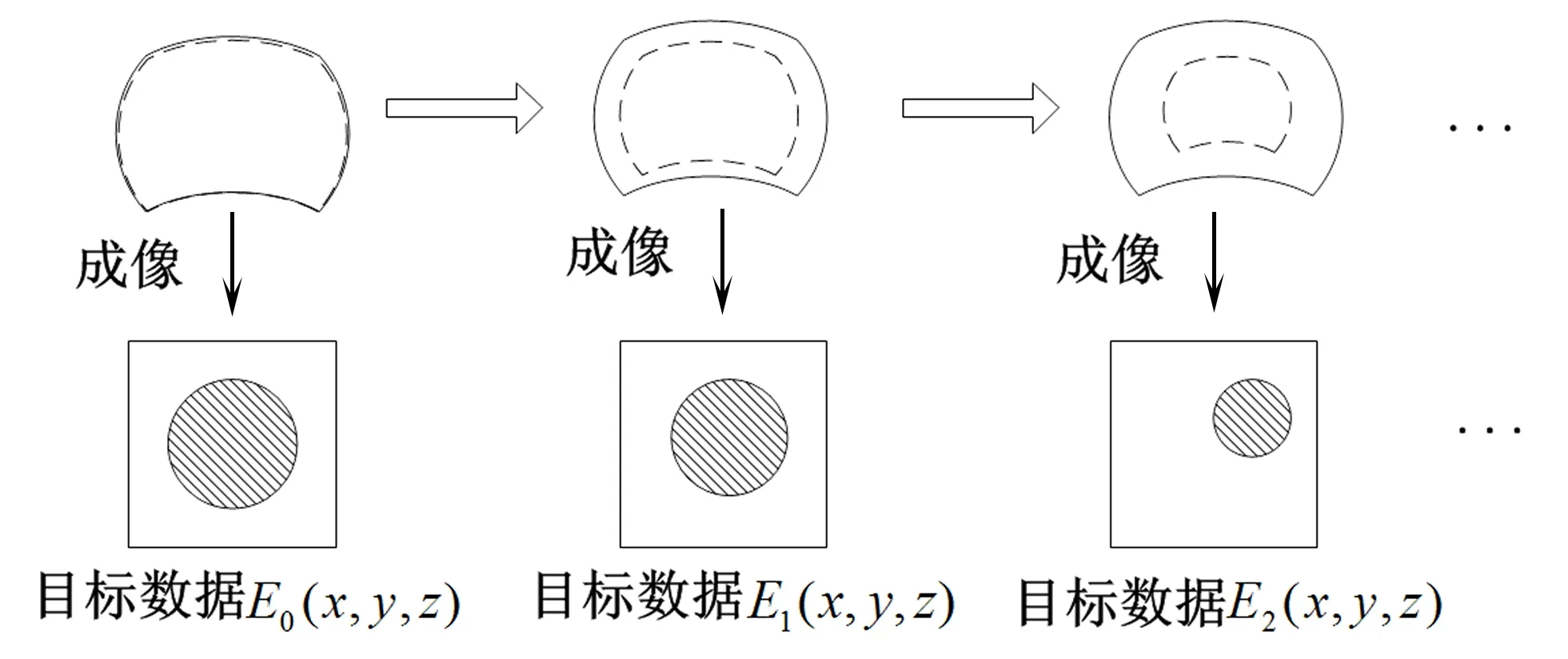
图1 划分单个子阵列
1)划分单个子阵列。首先,选择一个点作为子阵列的中心点。以该点为中心,选择可以选取的最大阵列,将这个阵列作为初始子阵列,对目标进行三维成像后,得到目标数据E0(x,y,z)。然后保持该中心点不变,将子阵列的长宽各减小一定值,得到新的子阵列,这个值可根据全阵列的大小与RCS曲线精确度需求灵活选择。用新的子阵列成像,得到新的目标数据E1(x,y,z)。
定义一个互相关系数:
用以表示两组数据前后变化的剧烈程度。其中:⊗表示阿达马乘积;‖‖2表示取二范数。
若E0(x,y,z)与E1(x,y,z)的互相关系数大于预设的互相关系数门限K,则继续缩小阵列并计算目标数据,直到前后两次的目标数据的互相关系数小于门限K,此时的子阵列就是一个划分好的子阵列。
2)划分全部子阵列。定义θ为测量角度门限,表示子阵列相对于待测目标中心点的角度值。为了确保外场测量时,能够将待测目标与场景分离,θ的取值不宜过小。
如图2所示,在划分出第一个子阵列后,将该子阵列4条边延长,可得到8个剩余子阵列i,i=1,2,…,8,若剩余子阵列i短边相对于待测目标中心点的角度值θi>θ,则将中心点移至该剩余子阵列中心,继续划分,直到所有子阵列短边相对于待测目标中心点的角度值都小于测量角度门限θ。

图2 划分全部子阵列
1.2.2 RCS曲线拼接
如图3所示,将划分得到的子阵列分别反演,得到对应角度的RCS曲线,再将所有曲线按对应角度拼接,即可得到待测物体完整的RCS曲线。物体特定角度的RCS曲线可通过计算该角度对应的子阵列获得,无需计算全部的天线阵列,一定程度上减小了计算量。

图3 RCS曲线拼接
2 仿真结果
2.1 小车目标
如图4所示,天线扫描阵列呈球面分布,待测物体位于球心,每个阵元向球心发射线性调频信号。参数设置如表1所示。

表1 仿真参数

图4 小车实验场景几何结构
采用本算法计算XOY角度为0时,XOZ方向小车的RCS曲线,实验计算结果如图5所示。
图5为小车总的RCS曲线,其中:实线表示电磁仿真软件计算出来的目标小车RCS理论值;虚线表示本算法计算得到的局部RCS的拼接图;点线表示不进行子阵列分割,全阵列计算得到的RCS曲线。从图5可看出,小车目标的前后窗凹陷处RCS计算精度大幅下降,本算法对于该现象有一定改善。

图5 小车RCS计算结果
表2为小车目标RCS计算值与理论值的均值差与标准差差。使用全阵列计算误差较大,而在使用本子阵列算法进行计算时,均值差、标准差差均与理论值更为接近,误差有明显改善。

表2 小车目标RCS计算值相对理论值的均值差与标准差差
2.2 飞机目标
仿真实验参数不变,将目标换为图6的缩比飞机模型,采用本子阵列算法进行计算。仿真结果如图7所示。

图6 飞机实验场景几何结构
图7为飞机总的RCS曲线,从图7可看出,在飞机机翼处,相位逆转现象较为严重,RCS计算精度大幅下降。

图7 飞机RCS计算结果
表3为飞机目标RCS计算值与理论值的均值差和标准差差。在对较为复杂的目标进行测量时,子阵列算法的计算误差依然优于全阵列的计算值,主要的误差存在于子阵列与子阵列的交界处,以及发生相位逆转现象处,本算法对于相位逆转引起的RCS计算值减小有一定的改善能力。

表3 飞机目标RCS计算值相对理论值的均值差与标准差差
3 结束语
针对大观测角下出现的相位逆转现象,提出了一种基于子阵列自适应成像的RCS测量方法,并进行了仿真以验证其有效性。本算法对于相位逆转现象造成的RCS测量精度下降有一定的改善作用,使其可以满足一定精度要求下复杂目标的RCS测量。
