基于观测器的非线性系统传感器故障估计方法*
2021-01-22孙延修
孙延修,杜 莹,黎 虹
(沈阳工学院基础课部,辽宁 抚顺 113122)
0 引言
随着工业的发展,现代系统的安全性和可靠性越来越引起人们的重视,故障诊断技术受到了广泛的关注。系统故障诊断是对系统运行状态和异常情况作出判断,并根据诊断作出判断,为系统故障恢复提供依据。现有的故障诊断方法有基于观测器的方法、参数估计方法和等价空间方法等,大部分用于数学模型的故障诊断。
近年来,基于观测器方法的故障诊断技术取得了一定的研究成果。文献[1-3]通过设计滑模观测器,对系统中的故障进行了诊断与估计。文献[4-6]通过未知输入观测器(UIO)的方法,对系统的故障进行了诊断与估计。文献[7-9]通过设计自适应观测器,对系统中的故障进行估计,文献[7]通过设计奇异观测器,对系统中的传感器故障进行了估计,该方法不需要假设故障导数的上界已知,所提到的方法更具一般性。文献[9]通过设计滑模观测器,对传感器故障进行检测,进而得到对传感器故障信号的估计,但该方法需要系统中的扰动项和传感器故障有界,具有一定的局限性。文献[10]通过设计增广观测器,对系统中的执行器故障进行了诊断与估计,所提方法考虑到了增广观测器的收敛速率,具有一定应用意义。
基于上述分析,本文在文献[7]的基础上结合文献[10]针对一类非线性系统,提出了一种基于增广状态观测器的传感器故障诊断方法。利用MATLAB 求解线性矩阵不等式,得到观测器的增益矩阵,并用构造出的增广状态观测器对原系统的状态和传感器故障进行估计。在增广状态观测器的设计过程中,还可以通过选择对称正定矩阵,进一步保证增广观测器的收敛速度。最后,通过数值算例说明了该方法的有效性。
1 系统描述


2 非线性系统传感器故障诊断观测器的设计

3 增广观测器的存在性判据
3.1 无干扰情况下观测器存在的充分条件

为了保证观测误差系统的收敛速度,可以通过有针对性地选择正定矩阵P,Q,该方法可以参考文献[10]。
3.2 外部干扰情况下观测器存在的充分条件
定理2 针对Lipschiz 非线性系统(3),若存在正定矩阵P、增益矩阵L 和常数β,使得如下线性矩阵不等式成立,

则增广状态观测器误差动态方程式(5)是鲁棒渐近稳定的,其中,β 为大于0 的标量,*代表矩阵的对称部分。
证明考虑系统存在干扰项,证明过程可以分两部分进行:


定理2 考虑到了系统的干扰项,通过求解满足矩阵不等式的参数β,使其最小,从而减少干扰项对传感器故障估计的影响,实现观测器对传感器故障的鲁棒估计。
4 传感器故障的渐近估计

5 仿真算例
例 考虑如下非线性系统,非线性系统的参数如下,

利用MATLAB 可以计算出矩阵T,N 为

1)当系统不含扰动项时,应用MATLAB 中的LMI 工具箱,求解线性矩阵不等式(6),可得增益矩阵为
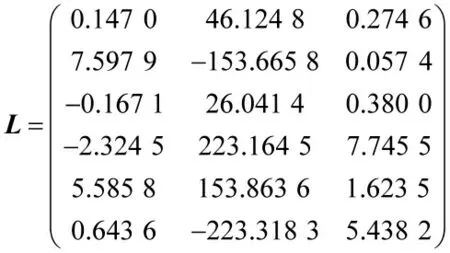

图1 无干扰时观测器误差曲线

图2 无干扰时观测器误差曲线
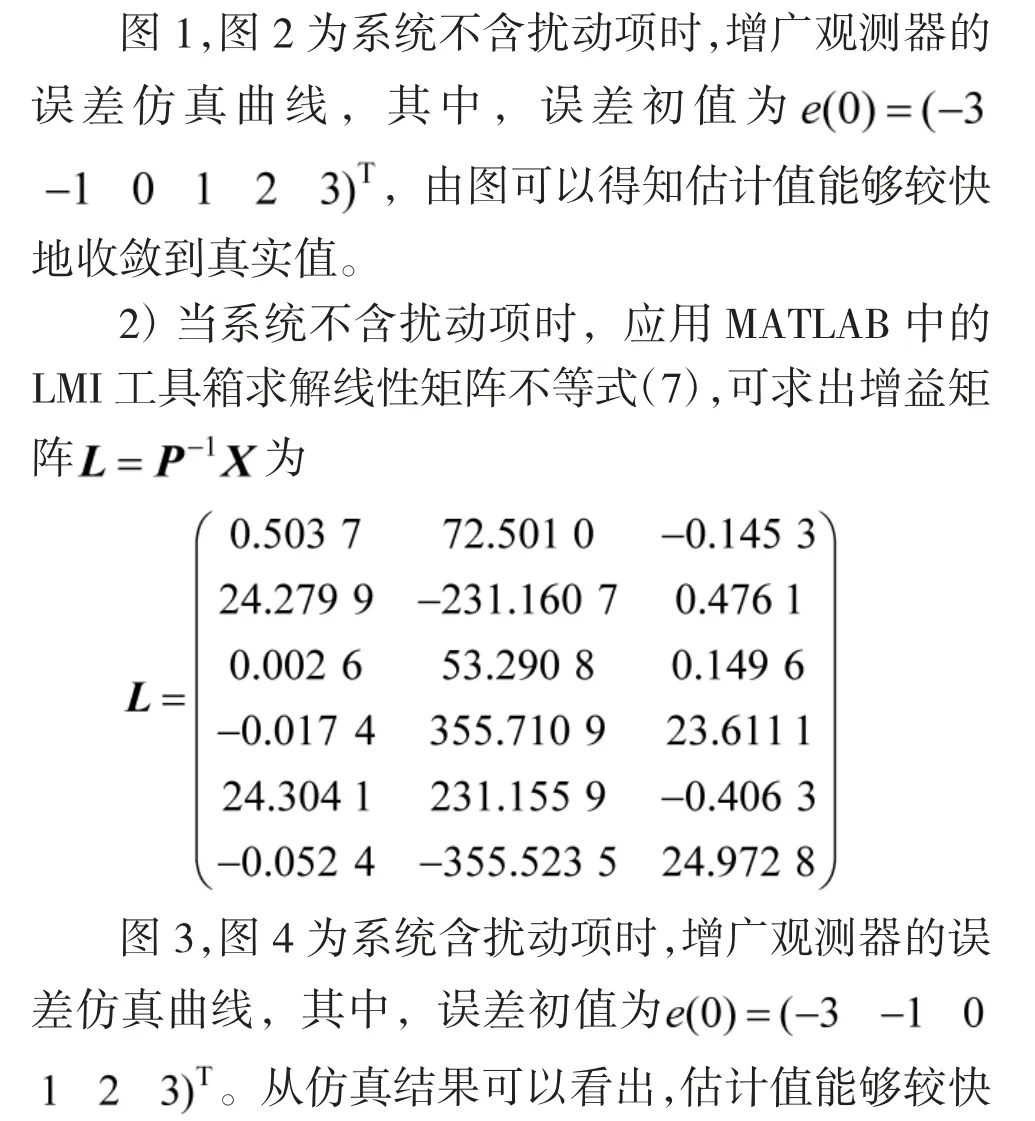

图3 存在干扰时观测器误差曲线
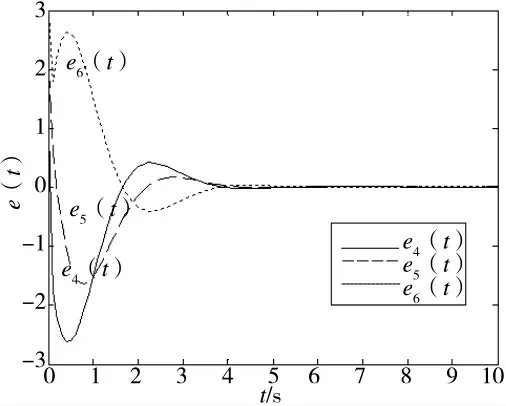
图4 存在干扰时观测器误差曲线

6 结论
本文针对一类非线性系统,提出了一种利用增广观测器对传感器故障进行鲁棒估计的方法。针对设计的增广状态观测器,给出了观测器存在性判据。当系统不存在干扰时,可以保证状态误差方程的收敛速度;当系统存在干扰时,可以减少扰动对传感器故障估计的影响。最后,通过仿真算例验证了观测器误差渐近收敛,保证了增广观测器对系统传感器故障进行估计的有效性。