自平衡运输车
2021-01-21汤先灿孙浩凯李晓燕纪光洋姜鑫
汤先灿 孙浩凯 李晓燕 纪光洋 姜鑫



摘要:针对无电梯楼层间、室内外中短距离的场所及复杂地形的家电、药品、生鲜类和易碎类物品运输的问题设计出了自平衡运输车。该运输车主要由主控系统、载货平台升降机构、夹持货物机构、行走机构、检测模块等组成。设计采用STM32F103作为主控核心,通过陀螺仪传感器读取角度,单片机接收到角度后通过PID计算将数值赋值给推杆电机,由推杆电机推动载货平台,使载货平台始终保持与地面平行。云台下方装有推杆电机,推杆电机具有自锁功能,云台装有压力传感器,当有压力产生就够自动锁紧货物。GPS定位装置、图像传输功能以及光电开关,可以自主行走并躲避障碍以及准确定位。行走机构采用履帶式底盘,采用直流减速电机驱动;反应灵敏,耗能较低,电机采用差速方式转向,在楼梯等复杂地形转向更加灵活迅速。该设计有效解决了多地形搬运物品的问题,有效的提高了搬运的效率、货物的安全以及大大节省了人力。
关键词:运输问题;自锁;传感器;躲避障碍;履带式
引言:随着科技的发展,机器人代替了人进行劳动,从而大大的解放了劳动力,但是在室内外货物的搬运依旧还是需要大量劳动力。例如:在有很多城市内仍然有没有安装电梯的居民楼人们在运输家电时将浪费大量的劳动力。在果蔬运输时,一些大型的运输车无法进入种植场地,只能由人力运输到外部,再通过运输车运输到指定地方,加上种植场地道路复杂,在运输过程中容易出现磕碰造成果蔬的损伤,这样既浪费了大量的劳动力,又不能保证果蔬质量,工作效率低。在室内外运输货物时,搬运人员将会浪费大量劳动力去把货物运输到指定位置,再返回继续搬运货物,并且在运输一些贵重物品、易碎物品时不能保重货物的安全性。若能设计出一种自平衡调节平台的运输车,它完全可以作为人类搬运的替代工具,能够在狭窄的楼梯、室内外复杂的环境下完成对家电、药品、生鲜类和易碎类物品运输,这样能够在运输的过程中,保证货物的安全性,不会造成需多损失,节省了大量的劳动力。在机器人这个科技领域中发展最快最为流行的就是服务机器人,服务机器人的出现解决了人们生活的需要劳动力的场所,服务机器人的产生大大减少了劳动力,提高了工作效率。所以,现在研究出的运输车能够适应多种复杂地形和运输多种货物并具有的智能化程度高将会是未来运输车发展的走向。
1硬件系统设计
1.1控制系统
自平衡运输车使用STM32单片机作为其主控系统。将32单片机的优点和自平衡车的设计进行结合,从而发挥最大的作用。比如STM32的CRL寄存器能够修树输入、输出形式,还能够修树输出的最大速度。开漏形式和推挽形式:弱上拉和下拉电阻被禁止,开漏形式时,读输入数据寄存器时可取得I/O口状况,推挽形式时,读输出数据寄存器时可取得最终一次写的值,模仿输入装备。弱上拉和下拉电阻被禁止读取输入数据寄存器时数值为0。STM32和CRL相结合,可以很大程度上维持行走,图像,以及检测模块的正常运行,并第一时间进行修复。给平衡车营造了一个较为安全的工作环境。系统组成如图一所示。
1.2行走机构
关于平衡车的行走结构,我们采用了舵机带动履带的方式。在设计时我们收集了以往自平衡车的资料,发现当运输车运输货物进过有坡度或者高低不平的道路时,运输平台会随着路况变化发生倾斜,这时货物的重心会发生前移或后移,这个现象会使运输车上坡时需要更大的动力,爬坡的能能从而减弱,下坡时速度难易控制,抓地能力差。这种现象的产生不能保证货物在运输过程中的安全,从而造成货物损伤。由此我们研究的重点便转移到了,如何很好的保持平衡车的重心。我们针对于轮式结构和履带式结构分别进行实验。将两种结构分别置于工作环境中,以及上下坡环境。最后经过实验得出在平坦路段进行工作时,二者的工作能力没有较大差距,但是在不平整崎岖路段,以及上下坡路段进行工作时,履带式结构更能保持平衡,更能发挥它的作用。因此我们采用履带式结构作为它的行走机构。不仅如此我们还在原有基础上,对履带改进成了一种特制越野履带底盘使其能够转向灵活适应多种复杂场。
1.3遥控器控制以及图像传输
在它的行走上。我们还加入了蓝牙装置,并且配备了遥控器。在使用时打开蓝牙,将遥控器与平衡车连接,就可以对遥控车进行远程操控。不仅如此,在平衡车上添加了摄像头,用来监控和传输平衡车的工作环境。使人们在使用时,可以根据摄像头传输过来的影像,对平衡车的工作进行实时调整。无线遥控结合摄像头的实时图像传输,这种方式操作简单,对复杂狭小的环境能够做到较全面的了解,不需要程序控制,稳定性较高。同时在车身特定位置安装光电传感器来进行近距离的障碍物检测。二者相互配合,既可以通过图像传输完成复杂环境的了解和掌控,同时对于近处、易忽略的小型障碍物也可以采用光电传感进行避让。
1.4自平衡机构
本设计采用推杆电机与平行四杆机构的配合,平衡四杆机构是一种可伸缩的结构,通过折叠将它的伸缩杆放在两侧的固定杆之间,减小一定的空间。在使用时系统会通过判断将伸缩杆进行伸展和缩紧。由此便提高了它的工作范围,并且在一定程度上节约了能源。下面是它工作时系统识别与发出指令的详细过程。工作时系统先判断是否有角度的产生,当有角度产生时先通过单片机内部PID计算,将得到数值赋值PWM,驱动推杆电机动作,从而推动连接轴,带动滑块运动,当滑块产生偏移时,四杆机构随之变化使载货平台保持水平。采用推杆电机其推杆电机的自锁能力和承载能力将会保证载货平台在运动过程中保持稳定不会发生滑动。
1.5夹持机构
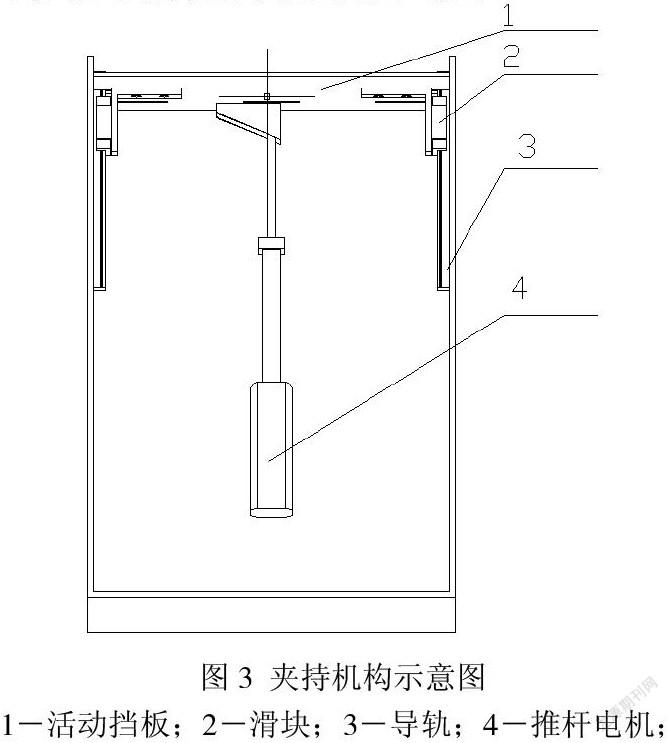
本设计为解决在运输过程中夹紧货物使货物在平台稳定,故搭载了夹持机构。夹持机构采用滑块与推杆电机的配合,当单片机得到信号时将会驱动推杆电机动作,这时活动挡板随之移动,滑块在轨道上进行移动,与活动挡板同时移动。夹持机构示意图见图3所示。
1.6检测装置
我们在平衡车内部添加了几种不同的传感器,用来检测它的工作环境。其中陀螺仪传感器用来检测和读取角度,从而便于系统识别和下发指令。然后通过单片机的计算,将信息赋予推杆电机,从而使自平衡机构运作。压力传感器通过检测运输物体的大小和形状,以及它的压力大小,从而使夹持装置做出调整。使物品的运输更加安全,稳定。
2软件系统设计
2.1技术路线
通上电时首先进行系统的初始化,当初始化串口、陀螺仪、时钟、ADC采值、GPS完毕后进入main函数当中进行变量的初始化。程序开始先检测压力传感器数值判断是否有货物,如果没有货物保持不动,否则进行下一步,运输车开始运行,光电传感器实时检测控制电机避障,在运行过程中陀螺仪检测是否有角度产生,将角度的数值经过处理,通过PID算法控制电机,使载货平台保持水平,然后再进行判断角度,没有角度产生则继续运输,有角度产生则再进行上一步电机的驱动,GPS在运输中实时发送卫星位置。具体工作流程如下图4所示。
2.2夹持货物
本设计采用HX711称重模块,当放上货物时,程序用AD采集数值,采用均值滤波,设计连续间隔20us采集,把10次数值累加之后再除以10得到数值,连续得到均值滤波后的数值进行比较,判断货物是否已经平稳放上,当判断数值偏差较小,则推杆电机进行货物的夹紧,运输车开始运输动作;当数值偏大则运输车保持不动。夹持货物流程图见图5所示。
2.3载货平台自平衡
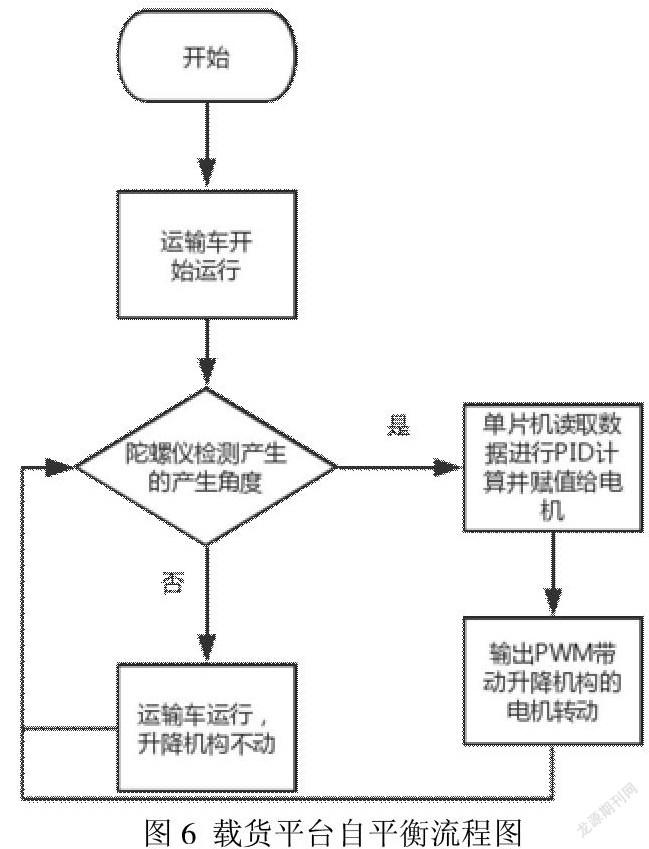
本设计采用电机与mpu6050陀螺仪的配合,单片机采集到的陀螺仪产生的角度,将采集的数值先进行冒泡排序和均值滤波,滤波之后的数值再根据角度PID算法程序得到电机需要转动的方向和角度,并给推杆电机一个PWM信号使其到达平衡点,再采集到达平衡点后的运输车的实时角度,再将该角度值反馈到单片机进行比较,从而形成闭环控制。载货平台自平衡的流程图如图6所示。
2.4基于SolidWorks软件三维模型的设计
为了更全面充分的展示出自平衡运输车的外观效果,我们对其进行了SolidWorks建模设计。我们先对该作品的零件图进行绘制。完成之后,对零件图进行装配。组成实物后对其进行composer动画的制作,模拟它工作时的效果和运动状态。从而验证结构设计的可行性。一般在SolidWorks中会发现一些基本的结构设计不妥,或零件的選择不当等问题,从而影响它后期的运动和工作。通过前期的SolidWorks建模,会给作品建立一个基本的结构模型,也给后期电路的制作以及实物的搭建建立一个良好的基础。
3结论
自平衡运输车由控制系统、自平衡机构、夹持机构、行走机构、检测模块、图像传输及遥控等模块组成。我们按照现如今,各行业,各人群对自平衡运输车功能的需求进行设计。尽最大可能使其具有更全面的能力。控制系统STM32和CRL寄存器相结合,对其行走以及工作的程序进行快速的补漏,使其具有安全稳定的工作环境。行走机构利用履带的设计,维持它工作以及崎岖复杂路面的稳定行走。图像传输模块将平衡车工作时的影像进行实时的传输,和控制。检测模块通过传感器的作用,测量其工作时的角度和指数,从而做出正确的判断。几个设计之间相互渗透,相辅相成共同完成自平衡运输车的工作与运转。不仅如此它还具有较高的工作效率和实用性。推广之后,一定可以给社会和运输行业带来很大的实用价值与意义。
参考文献
[1]石少健,陈燕慧.无线远程操控果园自平衡运输车设计[J].农机使用与维修,2019(01):11-13.
[2]乙金林,陈雯雯,张亚炜,沙春芳.基于dsPIC33EP16GS502的两轮自平衡小车控制系统的设计[J].电子制作,2021(17):3-5.
[3]李冠奎,秦云翔.基于STM32的自平衡小车结构和系统设计[J].信息与电脑(理论版),2021,33(09):84-86.
[4]杨志强.基于STM32C8T6的智能二轮自平衡小车的设计[J].电子测试,2020(17):9-11+37.
[5]徐猛.基于STM32自平衡小车的设计与制作[J].计算机产品与流通,2019(09):110.
[6]丁汕汕. 基于模糊滑模控制的两轮自平衡小车系统设计[D].安徽工业大学,2019.
[7]史策. 模糊滑模控制在两轮自平衡小车中的应用研究[D].安徽工业大学,2019.
作者简介:汤先灿(2002-),男,山东省济宁市人,学士,研究方向:三维工程。
该项目由国家级创新创业训练项目《自平衡运输车》(S202113320045)支持。