考虑换道过程影响的城市交通流动力学方程
2021-01-21熊天成杨海飞
吴 中,熊天成,杨海飞
(河海大学土木与交通学院,江苏 南京210098)
城市主干道、快速路的换道区、交织区因受客观条件限制,已经成为约束城市交通通行能力提升的瓶颈之一[1]。 在有限的时空范围内换道时,主线车流受侧向换道流率和换道行为发生时加减速过程的影响,可能发生明显的速度波动和交通流紊乱,通行能力也会受到损失[2]。 研究城市车流高密度条件下的换道行为,有助于提高对城市道路产生拥堵的机理认识,也是提升科学管理与控制城市交通流的重要理论依据。 作为描述城市交通一般规律的交通流方程,需将车辆换道行为(包括换道过程)对交通流的影响考虑在内。
1 交通流方程与换道模型发展
国外对交通流方程的研究起步较早,大多依靠对高速公路或隧道等连续交通设施的交通流观测进行研究,已形成了以LWR 模型为代表的守恒类方程[3],其求解需要和基本图模型联立;此外,还形成了参考流体动力学动量方程、引入车辆守恒关系的速度梯度类动力学方程[4],Daganzo(1995)[5]在速度梯度的引入和替代密度梯度上做出了重大贡献。
描述车辆变道的换道模型仍然在发展之中,目前主要成果分为换道决策(lane-changing decision,LCD)模型和换道影响(lane-changing impact,LCI)模型两大类[6]。 LCD 模型通常是换道决策经验的总结,由换道规则表达,并设定包括安全距离、车头时距等多参数的效益选择,但模型难以量化换道流量和换道过程对道路通行能力的影响,其代表模型有Gipps 类模型[7]和Ahmed 效用选择类模型[8]等。 LCI 模型则主要考虑换道行为发生后或者换道行为发生过程中对车流的影响。 Laval 和Daganzo(2006)[9]提出了高密度条件下的自由换道车流遵循各车道速度平衡的原则, 克服了换道后主线车流没有明显变速的缺陷; 张培雷、 吴晓层等(2006)[10]提出了考虑侧向驶入驶出的多车道非均衡交通流模型及其Godunov 差分计算方法,对高密度交织车流有较好的适应性;朱辉(2008)[11]结合实测数据进行综合分析,提出了三车道交织的Payne 方程类模型;Jin(2013)[12]提出了考虑换道强度的侧向基本图模型,重点研究了换道时空条件、道路几何特征以及换道差异对车流速度产生的影响;吴中(2018)等[13]提出了考虑交织影响累积效应的交通流模型。 此外,学者还提出了解释换道机理的间隙接受模型和加减速接受模型[14]。
在应用方面,LCD 模型提供的换道决策流程,主要作为换道的元胞自动机模型的依据。 LCI 模型则考虑换道式引起的车流密度及相应的速度变化,其思想可通过守恒方程或动力学方程表达。 Laval 模型和Jin 模型基于守恒方程描述了换道过程前后的稳定车流(车流加速度为0)状态的变化;文献[11]并未给出换道影响项的具体表达;文献[10]和文献[13]模型虽然基于速度梯度的动力学方程,但都是将相邻车道速度差作为换道难度考虑的,加减速系数不反映换道车辆在整个道路层面上的竞争与平衡。
本文通过对Laval 模型的深入挖掘,考虑换道竞争与平衡状态中的车流加速度变化,提出了一种城市交通流的动力学方程,主要针对城市高密度交通流的换道过程影响。
2 换道竞争与平衡状态理论
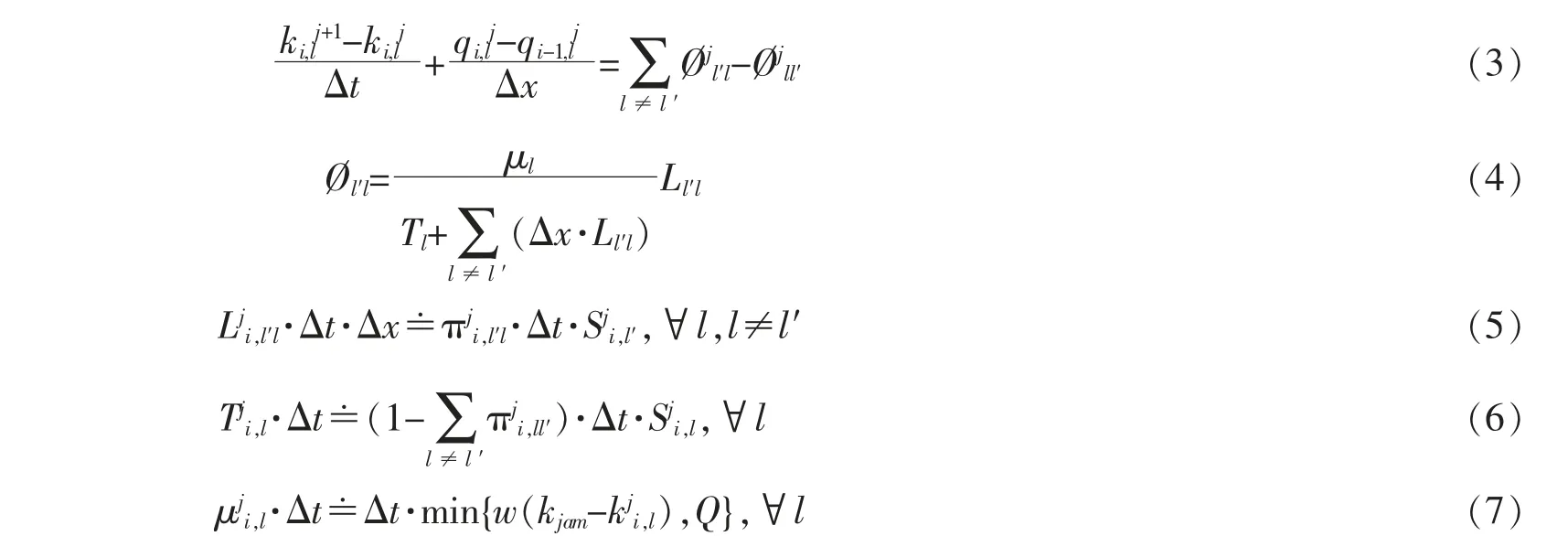
Laval 和Daganzo[9]提出的高密度交通流状态下的适用于高速公路的换道模型具有代表性。 基于运动波(kinematic wave,KW)理论的扩展分析,模型将LWR 模型右端项改写为非齐次形式

式中:kl和ql分别为l 车道的密度和流量;Øl′l、Øll′为单位时间内侧向换道流率。
Laval 模型表达了车辆换道竞争与平衡过程,模型考虑换道区内各车道的速度平衡和换道极限,在满足竞争平衡原则的选择比例下产生自由换道流率, 并通过目标车道最大可用容量对强制换道流率进行限制。模型的核心是通过换道折减系数影响单位时间、单位长度内的侧向换道流率。 模型中换道折减系数可以表示为

式中:μl为l 车道的单位时间内最大可用容量;Tl为l 车道除驶出流量以外的前进流量;Ll′l为设计换道流率,它表示单位时间内相邻车道所有需要换道的流率。 换道折减系数既表示车辆换道的难度,也是多车道换道平衡的依据。
由于竞争与平衡需在离散状态下表达,用i 表示道路空间坐标,j 表示时间坐标,对式(1)进行离散处理,设定仿真空间步长Δx=uf·Δt,计算过程可表达如下
式中:Sji,l=Δt·min{ukji,Q}为单位时间内l 车道总的行进车辆数;Q 为l 车道最大通过能力;w 为l 车道拥挤状态下的阻塞波波速;kjam为l 车道的阻塞密度。
模型中,在自由换道时换道车流遵循车流速度的平衡,强制换道也必须使得车流进入目标车道而不致其完全堵塞,Daganzo 利用三角形基本图给出了可用容量μl的计算式。 依据Daganzo(1997)[15]提出的换道规则和折减系数,Laval 模型将自由、强制换道行为综合考虑,给出了表达换道竞争与平衡状态的守恒类方程及其辅助差分式。 然而,Laval 模型无法反映偏离基本图的交通流状态,也不能任意表达车流加减速过程,其应用也受到了一定限制。
3 考虑换道过程影响的交通流方程
3.1 控制方程
基于交通流动力学方程成果[16]并受Laval 模型的启发,本文提出包含换道过程影响项的交通流动力学方程,见式(8)

其中

式(8)中:方程左端项为车流加速度,右端第一项(ue,l-ul)/τ 为跟驰模型中因偏移平衡速度而产生的加减速回归项,ue,l为l 车道的平衡速度,ul是l 车道的车流平均速度;右端第二项(1/τ)·(γ/kl)·(∂ul/∂x)为前端加速度改变引起的后端车流加速度变化项,其中γ=-(du/dk),为大于0 的常数,kl为l 车道的车流密度。 考虑跟驰过程中驾驶员的反应延迟,因此上述两项加速度变化项存在一个滞后时间τ,能够更准确地描述跟驰中的动态变化。 式(9)中:δ=(ul-ue,l)/ul,Ql-1→l,Ql+1→l,Ql→l-1,Ql→l+1分别为第l-1、l+1 车道侧向驶入第l 车道和第l 车道侧向驶出至第l-1、l+1 车道的侧向流率,pcu/(km/h),该项表达了换道完成后因车道密度改变引起平衡速度变化而产生的加速度变化。
在拥挤状态下(最佳密度km至阻塞密度kjam之间),车辆的换道过程会显著影响上游交通流状态,产生两股及以上车道交通流之间的粘性,这种影响的强度由式(10)表达。
3.2 换道过程影响项
现有研究表明,目标车道车流在非拥挤状态下,车头时距较大,车辆换道过程顺畅(不考虑大量车辆在同一时刻换道的特殊情况),换道过程中几乎不产生加速度影响,即(k<km)时ξ 项为0,此时式(8)可以用于描述低密度自由换道车流的交通特征。 而在高密度状态下,换道车辆未必能顺畅并入,且经常伴有加减速、转向、等待等过程,车辆从转向开始一直到驶入目标车道车队中的过程往往会影响车流的运行状态。 一般而言,影响换道难易程度的最主要因素是目标车道可用容量。 如果目标车道剩余可用容量不足,车辆在换道过程中速度降低,不仅对目标车道有影响,同时也对出发车道有影响,产生所谓的车道交通流之间的粘性,影响程度与换道流率相关。 车辆并入过程越困难,对相邻车道车流速度的影响就越大。

ξ 项仅在目标车道车流处于拥挤时才发挥作用,且换道流率越大,侧向干扰的强度就越大。 式(8)~式(10)同样适用于非拥挤状态下的交通流,只是换道过程影响为0。
3.3 参数标定
式(10)中,无量纲换道影响系数φ(εl)可以通过动力学方程与Laval 模型的计算比较来确定。 在给定工况、给定基本图的条件下,利用Laval 模型差分式计算车流换道前后的各个状态参数,并将计算所得参数代入动力学方程(8)差分计算格式,求解不同工况下φ(ε)的值。 在两模型差分计算中,空间和时间网格的剖分完全一致,初始条件和边界条件以及基本图模型也一致, 可以将Laval 模型换道状态变化等效地转化为动力学方程中车流加速度变化,从而得到φ(ε)的值。
不失一般性,设定两车道换道区,上游车流以均匀分布驶入,考察车辆从出发车道并入目标车道的工况。 选择工况都发生在拥挤状态内,即车流密度km<k<kjam(km为车道最佳密度),确保目标车道车流处于高密度状态。 标定得到高密度条件下的换道难度ε 和换道影响系数φ (ε) 的关系,如图1 所示。

图1 高密度条件下的车辆换道影响系数变化情况Fig.1 Change of lane-changing influence coefficient under high-density condition
难度的定义不仅与换道流率有关,也与目标车道剩余容量、总容量有关,难度综合反映了换道车流并入的难易程度。在密度相对较低的情况下,换道难度ε 增加时φ(ε)增速较慢(图1 中E3、E4曲线);而在高密度条件下,换道难度ε 增加时φ(ε)的指数增长较为快(图1 中E3、E4曲线)。
此外,在换道难度低于0.2 时车流基本处在稳定状态,加速度变化不大,换道影响接近常量。 当换道难度高于0.8 时,依据Laval 模型计算的排队换道流率很大,侧向车流基本处于阻塞状态。
φ(ε)可用式(11)拟合

式(11)中:ε0=0.2 为设定的换道影响阈值;A、b 为待定系数,在实际应用中,因道路条件、天气条件等发生变化,可以通过事先的调查数据进行标定,也可参考相似条件的其它换道数据进行线性回归分析获得;c(ul)为换道难度较低时的常量,与目标车道车流速度相关。


表1 拟合结果检验Tab.1 Test of regression equation
4 实例验证
根据2020 年8 月18 日南京市鼓楼区江东快速路草场门隧道出口至定淮门大街隧道入口段的交织区路段早高峰8:05—8:35 的通勤交通量建立模型,研究城市道路交织区在高密度条件下(km<k<kjam)的车辆换道过程及换道影响。该路段入口处为4 车道,出口处减少为3 车道,高峰小时内车道1-2、2-3 间存在大量驶入和驶出的换道车辆且强制换道比例较大;车道3-4 间车流主要发生自由换道,仅在部分时段的拥挤状态下产生强制换道。 取Δx=15 m,Δt=2 s。 采用三角形基本图,单车道限速uf=40 km/h,阻塞波波速w=20 km/h,阻塞密度kjam=150 pcu/km,滞后时间τ=3 s。

图2 研究路段空间划分示意图Fig.2 Schematic diagram of space division at research road section
选取密度较高且短期内发生多次自由、强制换道的时段(8∶23∶30~8∶24∶00)进行检验。 网格模型中有流量为1 800 pcu/h、密度接近100 pcu/km 的初始车流,仿真时段内输入流量为900~1 800 pcu/h,φ(ε)由式(11)、式(12)及表1 确定。 网格模型中车流速度变化过程见图3。
图3(a)中计算开始的前4 个时间步内,由于网格上游相邻车道存在大量排队换道车辆,车道1 的整体车速不断降低。 在第5 个时间步内发生了一次瞬时速度为27 km/h 的快速侧向驶入,但由于此时网格2 内的密度较低(83.3 pcu/km)且后车跟驰距离较大,网格内的车流速度在下一个时间步内继续下降。
图3(b)中,仿真开始后也出现了明显的速度下降。 在第5 个时间步内,网格3 在高密度(124 pcu/km)情况下发生一次强制侧向驶入,后端车流速度迅速下降,然后缓慢提升,一段时间后趋于稳定。
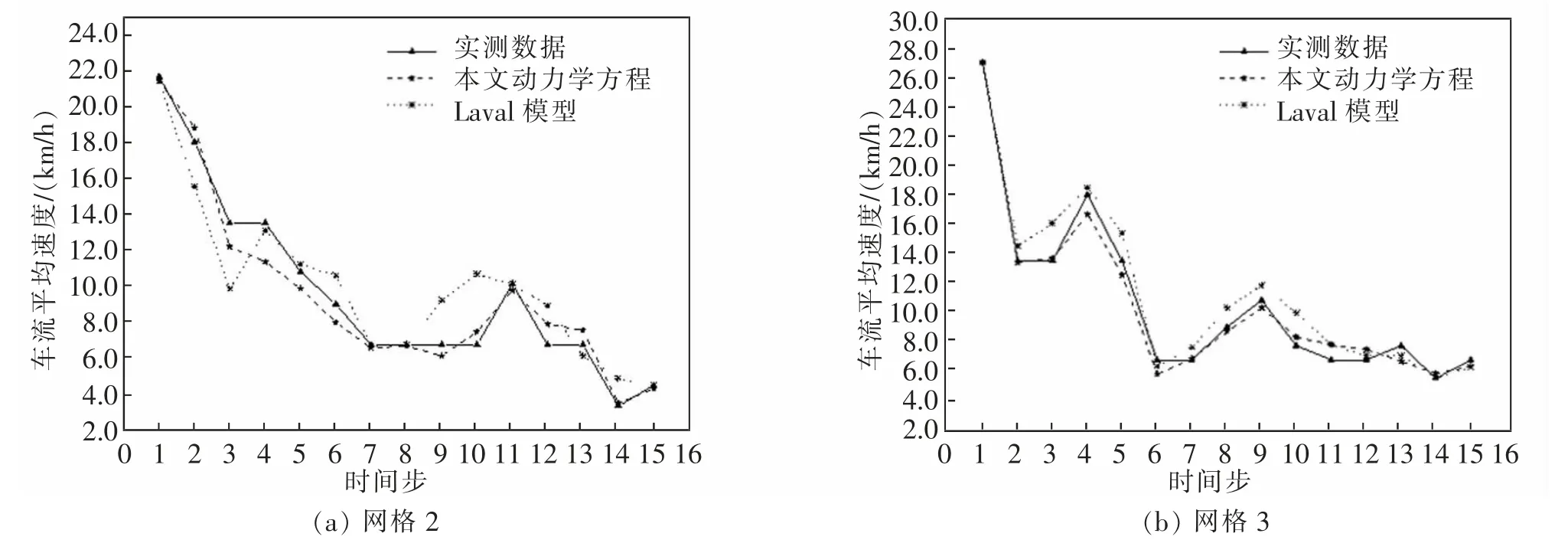
图3 车道1-网格2& 网格3 的速度实测数据与模型计算数据对比Fig.3 Comparison of measured speed data and model calculation data of Grid 2 and Grid 3 in Lane 1
从图3 可以看出,由于车道1 内密度较大且相邻车道排队换道流率较大,车流速度整体呈下降趋势,且增加的幅度较小、稳定性较低。在高密度条件下发生的强制换道导致的车流速度降低更为明显。模型结果接近实测数据,并表现出了车流实际运行中的速度调整过程,虽然数据有波动,但所提的动力学方程得到初步验证,计算误差比Laval 模型有所降低。 模型计算相对误差见表2。

表2 实测数据与模型计算数据相对误差值Tab.2 Relative error between measured data and model calculated data
5 结论
实验结果表明,引入描述换道竞争与平衡状态的换道过程影响项,可以使交通流方程更加准确地描述城市交通流高密度条件下的换道行为,并列求解多个车道的本文交通流动力学方程可以研究因换道诱发的城市道路拥堵状态的演变,也为研究特殊天气或工况下交通流拥堵的形成提供了一种新方法。
Laval 模型可以描述自由换道与强制换道,由换道折减系数予以区分。 动力学方程的换道难度基于上述换道折减系数,可以确定城市道路交通的强制换道流率以及排队换道流率在相邻车道的等待累积过程。
从交通流方程完备性考虑,可以认为换道过程影响项是交通流方程的粘性项,其性质与流体粘性相似。流体动力学N-S 方程描述的三维空间内一个方向上的粘性项是由X 方向速度对Y、Z 两个方向的二阶变化率来确定的。 交通流中一个车道可看作一个维度,车道上交通流的粘性项应由跨越相邻车道线的换道行为决定。 实例验证本文方程表现出较好的精度,这也反映出Laval 模型的合理性。