基于风螺旋的飞越转弯保护区定义算法
2021-01-21刘崇军段钧剑
刘崇军,段钧剑,赵 航
(中国民用航空西北地区空中交通管理局,西安 710082)
基于性能的导航(PBN,performance based navigation)是国际民航组织和中国民航在航路和终端区飞行中大力推广的主用导航方式[1]。在飞行程序设计过程中,PBN 转弯保护区外边界通过风螺旋来进行描述。国际民航组织规范中虽然对风螺旋进行了定义,但并未提供风螺旋的计算公式与切线算法,这对于正确理解规范以及开展软件自动化绘制造成了较大困难。
现有软件实现方法存在算法不完整、精度低、运算量大等不足,需人工进行干预[2]。在这些算法当中,最突出的问题是以阿基米德螺旋代替风螺旋进行计算。在不同参数条件下,由于误差大小表现不同和切线计算过程复杂,因而保护区的等距离外扩只能依赖软件平台的功能来实现,准确度无法保障。
风螺旋精确算法根据直线与圆周的角度关系,实现了风螺旋函数化的表达方式[3],同时完成了切线、公切线的精确化计算及等距离外扩的相关算法[4]。在此基础上,通过公式化方法对飞行程序转弯保护区进行精确绘制,运算精度和效率均能显著提高[5]。
在PBN 转弯保护区算法实现过程中,通过引入风螺旋精确算法,可以非常简便地对各类切线位置进行精确化描述,从而实现标准统一、误差大小可度量的飞行程序保护区,为进一步优化飞行程序规范提供了理论支持。
1 PBN 转弯保护区中的风螺旋计算
PBN 中的航路点用经纬度来表示,按照飞行方式分为:飞越点和旁切点。飞越点通常仅用作复飞点、等待程序起点及离场程序的指定点转弯。从航径编码来看,飞越点之后的航段类型有3 种:沿航迹至定位点(TF,track to fix)、沿航径至定位点(CF,course to fix)与直飞至定位点(DF,direct to fix)。飞越点之后衔接TF 或CF 航段时,二者的保护区构型相同,并且与旁切点转弯保护区具有相似性。飞越点之后衔接DF 航段时,保护区范围较大,计算方法与前几种类型存在较大差异。下面着重通过运用风螺旋精确计算方法,分析飞越点衔接DF 转弯航段的保护区算法。
转弯保护区计算的核心内容是对风螺旋构成的保护区外边界起点、终点进行计算。根据风螺旋的算法分析[6],风螺旋可以用转弯角度θ 和转弯过程中累积的风影响量Eθ来表示。Eθ与θ 之间存在固定的换算关系,因此各段风螺旋起止点可用对应的θ 角来表示。
风螺旋的切线总是与Eθ相垂直,Eθ的方向与θ 角之间相差1 个偏流角(DA,draft angle)。其值等于风速w 与真空速v 之比的反正弦值,各参数之间的关系如图1所示。其中,风螺旋切线方向角度与θ 角的换算关系为:切线方向角度等于θ 角减去DA 再加上90°。
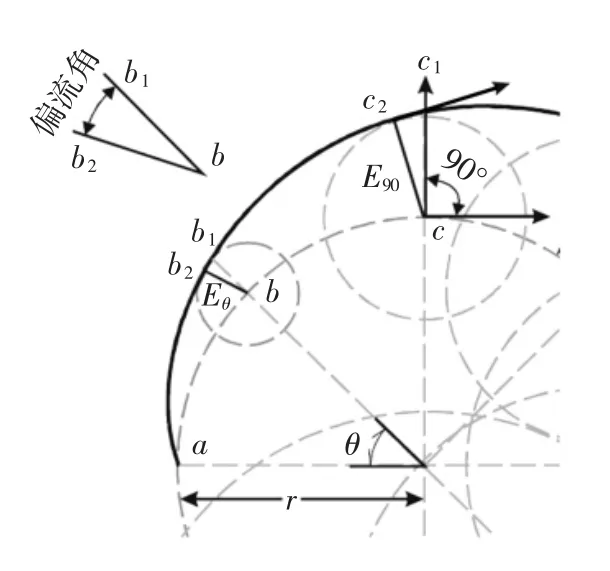
图1 风螺旋中的角度关系Fig.1 Angle relation in wind spiral
θ 角的计算分为精确计算和非精确计算两种方式。精确计算是通过角度计算关系,直接换算出θ 角度值。非精确计算是通过递归运算方法,迭代计算出θ角度值。
已知切线方向或航段结束方向,求θ 的情况属于精确计算过程。例如当风螺旋的切线角度为90°时,对应的θ 角度值为90°+DA。
已知风螺旋外1 点,过该点向风螺旋绘制切线,切点位置对应θ 角的计算就属于非精确计算过程。已知1 条直线与风螺旋相交,计算交点处对应θ 角的计算过程同样属于非精确计算。
2 小角度转弯DF 航段保护区画法
DF 航段转弯保护区通常遵循以下绘制规则:转弯内边界以最早点(图2中的k 点)和下一航路点(图2中的WP930 点)的连线为最早标称航迹,将最早标称航迹外扩15°与下一航段相连接,得到转弯后的内边界副区(图2下半部分的阴影区域)。若转弯角度较大,从k′点绘制的转弯保护区内边界将会比k 点绘制的保护区范围更大,此时内边界应从k′点开始绘制。
转弯外边界以主区最晚转弯点为起点绘制风螺旋,从下一航路点(WP930)向风螺旋作切线,以该切线为最晚标称航迹。将最晚标称航迹外扩15°与风螺旋相切作为转弯外边界的主区边界,与下一航段相连接,得到转弯外边界副区(图2上半部分的阴影区域)。转弯区的副区外边界由主区风螺旋外扩得到,切点与主区切点通常对应同1 个θ 角度。当转弯角度较大时,从主区内边界最晚点(或最早点)绘制的风螺旋会对保护区的构型产生影响。
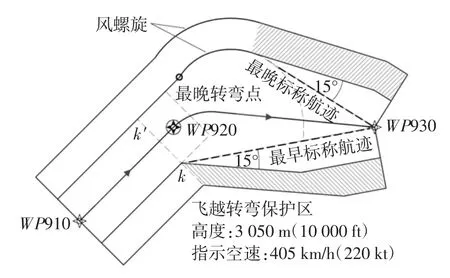
图2 小角度转弯DF 航段保护区Fig.2 DF segment protection area with small turn angle
3 飞越点大角度转弯保护区的计算
PBN 转弯保护区构型与转弯角度有密切的关系,根据国际民航组织规范[1]规定,仅当飞越点衔接DF转弯的情况下,转弯角度可以大于120°。按照PBN 进场航段RNP1 规范,保护区半宽为2.5 kt(1 kt=1.852 km/h),绘制的大角度转弯保护区如图3所示。
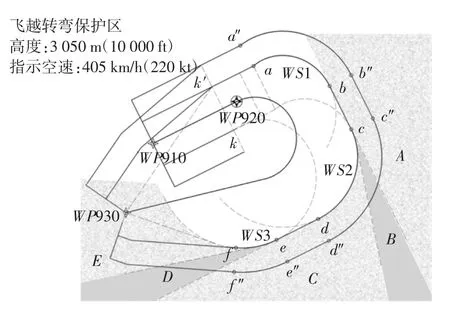
图3 大角度转弯DF 航段保护区Fig.3 DF segment protection area with big turn angle
通常情况下,进场航段中不需要设置飞越航路点,图3中为了简化WP910 至WP920 航段的保护区,因而采用了进场航段的宽度设定。为了充分演示转弯保护区与风螺旋的位置关系,使用了最大转弯角度。
按照顺时针方向依次对图3中出现的风螺旋进行编号,分别得到WS1、WS2、WS3 共3 条风螺旋。按照字母顺序对风螺旋的起、止点进行编号,主区外边界上依次可以得到a 至f 各点,副区外边界上依次可以得到a"至f"各点。
采用转弯参数、圆心点相同,只是初始外扩距离不同的风螺旋,可视为同一组风螺旋,例如图3中ab段风螺旋与a"b"段风螺旋。同一组风螺旋的作用范围通常相同,在大角度转弯保护区中各段风螺旋起止点的角度计算如表1所示。

表1 大角度转弯保护区边界点θ 角的计算方法Tab.1 Calculating method of θ at boundary points of big angle flyover-turn protection area
从表1中可知,在整个转弯外边界的保护区中,仅有初始段外边界a"点和转弯段结束点f(f")点需要通过递归方法进行计算,其余各点均可以按照表中所列公式计算得到。得到θ 角度之后,代入风螺旋的计算公式[7],可以完整绘制出DF 航段的转弯外边界。
在绘制转弯外边界的外扩段时,PBN 程序与传统程序的绘制方法存在显著区别。若传统程序外边界需外扩15°,直接从切点位置外扩即可。PBN 程序保护区在处理外扩15°的边界时,需按照外扩后的角度重新绘制切线,作为新的外边界。这样处理后,PBN 程序外扩15°线与原有外边界是平滑衔接的,而传统程序外扩后的边界与原有边界存在明显拐点[1]。根据风螺旋的计算方法,已知切线角度计算外扩15°的切点位置时,直接对θ 角减去15°代入风螺旋公式计算即可,算法上更为简单。
由外扩15°引出的另一个问题是:当出航航段终点(WP930)位于不同位置时,切线计算将更为复杂,导致保护区构型上存在较大差异。按照顺时针方向对转弯区外边界区域进行划分,可以得到A ~E 5 个阴影区域。
当航段终点WP930 位于A 区、C 区或E 区时,最晚标称航迹和外扩15°的标称航迹与同1 条风螺旋相切。当航段终点WP930 位于B 区或D 区时,最晚标称航迹由后1 段风螺旋决定,倒退15°找切点时,保护区外边界会由前一位置的风螺旋来控制,各区域的范围及保护区构型关系如表2所示。

表2 各区域的范围及保护区构型关系Tab.2 Scope and protection area configuration relation for each region
当航段终点位于B 区时,最晚标称航迹由风螺旋WS2 决定,倒退15°绘制保护区边界时,外边界与风螺旋WS1 相切,保护区的构型如图4所示。当出航段的长度发生改变时,最晚标称航迹的角度会发生变化,导致航段终点与所属区域的位置关系进一步发生改变。
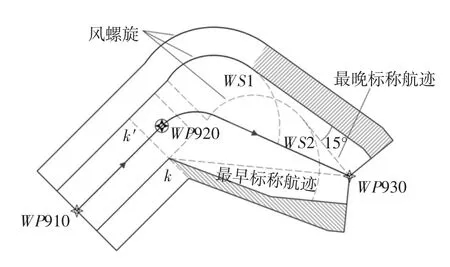
图4 航段终点位于B 区时的保护区Fig.4 Protection area with segment ends in region B
4 软件实现
该算法已通过C#语言在Windows 平台中实现。根据面向对象的设计方法,PBN 转弯保护区的核心类主要有3 种:①基础参数类,代表转弯参数的Turn Pa rameters 类和保护区模板基础参数的PBN Template类;②算法类,包括封装了风螺旋相关算法的Wind-Spiral类和与基础的几何运算相关的类;③绘图类,专门用于在系统中呈现算法类所计算得到的数据,通过对该类进行扩展,可支持多种数据格式的输出,可对不同系统环境进行支持。
通过上述软件架构可实现DF 航段转弯保护区的自动化绘制。在此基础上,通过对保护区进行区块细分(重点是对风螺旋部分进行细分),可实现障碍物的自动化评估功能。
5 结语
国际民航组织在传统程序模板中大量使用了分段模拟的风螺旋绘制方法,在PBN 保护区模板中则直接采用风螺旋的表示方法,不再使用简化画法来绘制保护区。从技术更新的角度而言,非精确绘制的计算方法难以满足自动化处理的需求,高精度、高效率的风螺旋计算是未来规范标准的发展方向。
目前,风螺旋精确算法已在传统程序模板中验证完成[8],并逐步向PBN 程序模板领域进行延伸。通过运用风螺旋精确计算的方法,可高效便捷地实现飞越点衔接DF 转弯航段的保护区绘制,填补了国内飞行程序设计领域内的技术空白,为后续障碍物自动化分析评估、全航段保护区衔接绘制进行了技术上的铺垫。
文中仅对3 个航路点之间的保护区进行了分析,在多航段连续衔接时,受航段长度、航线角度的影响,航段衔接处的保护区形状不固定,对自动化分析会造成较大影响,需进一步深入分析和讨论。
