永磁同步电机直接转矩控制模型与零序电流调节
2021-01-21许帮汉
王 雪 朱 颖 许帮汉
(1、三峡大学电气与新能源学院,湖北 宜昌443002 2、三峡大学计算机与信息学院,湖北 宜昌443002)
1 概述
随着交流调速技术的迅速发展,开关磁阻电机(SRMS)自20世纪80 年代以来得到了迅速发展[1]。SRM具有结构简单、坚固耐用、成本低、可靠性高、启动能力强、调速性能好等特点[2]。该机器可以保持高性能,即使在恶劣的环境,它提供了更经济的电机驱动选择在这些应用。
为了减少传统DTC 的弱点, 目前无位置传感器感应电动机直接转矩和磁通控制驱动器基于空间矢量调制, 以减少当前的目的,通量,扭矩,和速度波动,减轻声学噪声[3]。本文扩展了之前的结果,并提出了一种新的直接转矩模型预测控制(DTMPC)技术,具有损耗最小化和谐波降低能力。
2 驱动系统拓扑结构和数学模型
开路绕组直流偏置- vrm 的电机拓扑和绕组配置将y 形连接的定子绕组端断开,升起三个新端子,并将另一端的三个端子连接到两组共用直流母线的三相逆变器上。每个绕组两端可达,提供直流流路。
而表示两电平五相永磁同步电动机逆变器的开关矢量为:

如果i∈{u, v, w, x, y},则Si= 1,则下电源开关为OFF,上电源开关为ON。反之,则Si= 0,则下电源开关开,上电源开关关。
每个空间向量由二进制转换序列唯一标识 Suvwxy,(10N±1) 将0、1、2 被映射到3 次平面上,而10N±3 阶谐波被映射到3 次平面上。
在固定abc 坐标系下的电压方程表示为:

在固定abc 坐标系下的电压方程表示为:

忽略高阶电感谐波,磁链可以用相电感和相电流的形式表示:
3 零序电流调节的直接转矩控制算法
在直流偏置-vrm 驱动系统中,根据MTPA 概念,参考交流电流设置为2 倍的直流电流,以最小电流实现最大转矩,即i*dr= 0, i*qr=√2i*0 在三维dq0 坐标VC 系统中。当前的参考文献i*dr, i*qr, i*0 根据参考力矩进行调整。而对于DTC 策略,MTPA 轨迹由参考定子磁通输出输出,*和参考0 轴电流i*0 相对于参考转矩T,*e。*和i*0 相对于T,*e 在MTPA 条件下。当机器在恒转矩区域内运行时,将idr= 0,|iqr| =√2i0 代入(8),i*0与T*ecan 之间的关系表示为

对于具有公共直流母线的开绕组变换器,其驱动结构提供了零序电流流路。零序电流的直流偏置分量构成虚拟转子磁通,而零序电流的谐波分量增加系统损耗,产生转矩脉动,影响机器性能。两个逆变器之间具有120 度相位差的电压矢量使得最大六边形到中六边形的范围减小。圆的最大电压矢量表示为:Udcrepresents为直流母线电压

与传统交流电机不同的是,在开绕组中,udu 和uqs 的综合电压矢量需要分布到两个旋转坐标变换模块中,两个SVM模块为两个单独的逆变器生成两组PWM信号。传统的VC 系统需要三个旋转的坐标转换块:一个用于abc-dq0 电流转换,两个用于dq- a 转换的hdmp1 和dq- a 转换的hdmp2。与VC 系统相比,采用该电压分布方法的基于支持向量机的直接转矩控制系统不需要电流旋转变换。旋转坐标变换块从3 块减少到1 块,整体计算时间进一步缩短。
4 实验结果
实验验证了所提出的直流偏置vrms 的直接转矩控制策略。实验设备包括一台样机12 定子10 转子开式绕组dc-bias -vrm。基于TMS320F28335 开发了DSP 控制板,利用DSP 控制板产生的PWM信号控制开绕组逆变器。绝缘栅双极翻译器开关频率和DSP 采样频率均为20khz。负载转矩由负载电机施加。
下图为基于svm 的直接转矩控制策略、VC 策略和经典ST-DTC 策略的转矩、磁链和相电流实验比较。运行速度设定为额定1500 r/min,额定负载2.2 N·m。可以观察到,相电流中含有直流偏置分量。ST-DTC 策略比VC 和提出的DTC 策略具有更大的电流纹波。
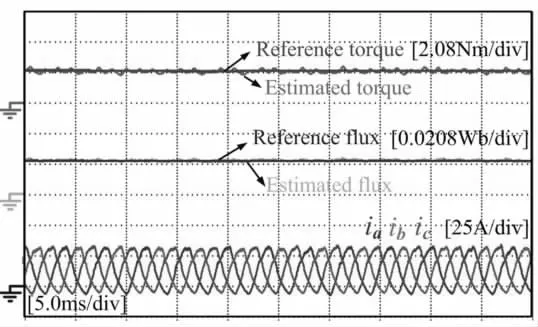
图2 svm 直接转矩控制
计算时间也会影响控制系统的性能,与VC 策略相比,该DTC 策略的旋转坐标变换块从3 块减少到1 块。为了验证整体计算时间的减少列出了VC 策略和提出的DTC 策略的计算时间比较。与VC 方法相比,DTC 方法减少了1 个公园变换块和1个逆公园变换块。该方法将坐标变换所带来的计算时间缩短了4.7 个转角。所提出的DTC 策略中附加的转矩和流量估计器计算时间为1.54°,而整个控制系统的计算时间为13.77°,与50支路的采样周期相比,该DTC 策略的剩余时间为36.23 支路。与VC 策略相比,所提出的DTC 策略消耗的DSP 资源更少,并且有很大的潜力用于其他算法。操作速度设定在额定1500 r/min。负载机在1.5 秒的瞬间突然施加2.2 N·m 额定负载(1.0 p.u.),在最后2.5 秒释放额定负载。电机从空载状态运行到额定负载状态,最后回到负载状态。12、所产生的参考转矩,与参考定子同步增加,以跟踪变化的负载。在动态运行中,转矩、定子磁通和0- 轴对称的反馈值可以快速跟踪,反馈值在1.4s 以内。由于装载机的加载过程需要调整时间,所以转速恢复相对较慢。
5 结论
针对具有零序电流调节能力的直流偏置vrms,提出了一种直接转矩控制策略。为了调节直流偏置电流,提出的方法保留了每个开关周期的调整时间。然后,在不失一般性的前提下,采用五相永磁同步电动机作为车辆牵引电动机的代表。所提出的预测控制技术使系统级损耗最小化,同时保持电机的发展转矩和定子净磁通在预先设定的公差范围内。在正常运行条件下,利用三阶谐波分量可优化每安培转矩的性能,将唯一的直流偏置电流与参考转矩和参考磁通紧密分布,以实现MTPA 条件。
此外,在提出的直接转矩控制策略的基础上,还引入了一种参考电压分布策略,以简化控制算法。实验结果验证了该方法可以实现稳态和动态运行下的零序电流调节。定子磁通和零序电流根据参考转矩进行调节。所提出的直接转矩控制策略与VC 策略具有近似的效率,且比VC - dtc 策略的效率更高。此外,通过减少旋转坐标变换,与VC 策略相比,计算时间也大大减少。保证了结构简单、鲁棒性好的优点。成功的实验结果表明,DTMPC 方法可以作为高性能电气化交通的一种有效解决方案。
